一种基于动力定位装置的沉管矢量推进系统的制作方法
本发明涉及沉管运输领域,具体而言,涉及一种基于动力定位装置的沉管矢量推进系统。
背景技术:
1、目前沉管管节的运输使用的是利用大型半潜驳牵引或拖行管节浮运,船身航向和沉管停放时持续停留的控制需要人工参与控制,而人工控制存在一定的滞后性,即操纵者给出指令后,船舵并不会立即产生相应的效果;滞后性导致操纵的不及时和不精准;而且操作人员的反应速度限制,使得船身难以在复杂、紧急的操纵情况下迅速做出反应。
2、沉管的浮运操纵需要操纵者具有丰富的经验和技能,导致相关人才培养成本较大;长时间的人工船舶操纵航行和停留需要持续对船舵进行调整,导致操纵者疲劳,影响操纵的准确性和安全性;在复杂的水域环境中,如大风大浪的海上环境、狭窄的港口,人工控制更为困难。
3、由于沉管管节自身结构大,重量高的原因限制,在水上运输时很容易受到天气和海浪的影响,导致管节受损,故需要更为平稳和安全的运输,所以航速不会太高;在突发恶劣天气的行驶或中途停靠都是对管节的考验,但困于船自身的局限性,无法自由转向、固定的推进方向都可能会使得管节受损。
4、管节的浮运需要半潜驳、护航船等船只的参与,使运输成本大大增加,且运输效率较为低下;因此,沉管管节的运输急需一种更加方便和节省人力的方法或系统。
技术实现思路
1、本发明的目的在于克服现有技术存在的以上问题,以及在原有技术基础上大大提高其技术效果;首先,本发明提供了一种基于动力定位装置的沉管矢量推进系统,该系统包括:
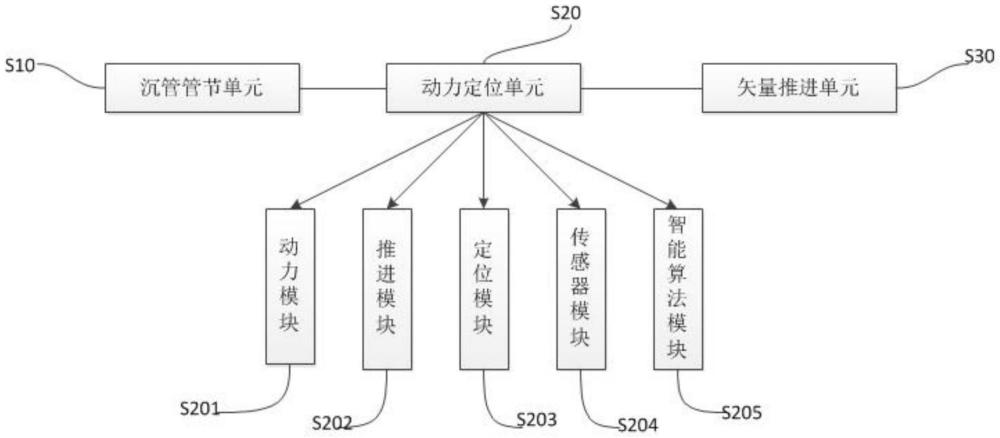
2、沉管管节单元、动力定位单元和矢量推进单元;
3、所述沉管管节单元上布置有动力定位单元和矢量推进单元;将沉管管节单元看做一个船体,将动力定位单元和矢量推进单元分别看做船体的动力定位系统和推进系统,将被视为船体的沉管管节单元运输到目的地;
4、所述动力定位单元为动力定位系统;动力定位单元安装在沉管管节单元上,同时与矢量推进单元相连接;动力定位单元包括动力模块、推进模块和定位模块;所述动力模块与推进模块相连接,用于给推进模块提供动力和能量;所述推进模块是一个采用推力矢量技术的推进器,推进器通过喷管偏转和推力偏转,使得推进器产生不同方向的推力,获得多余的控制力矩,实现沉管管节的姿态控制,并推进沉管管节向目的地前进;所述定位模块是动力定位单元的重要组成部分,每个动力定位单元上都安装至少两个的位置参考系统;位置参考系统包括卫星定位系统、水声位置参考系统、微波定位系统和激光定位系统完成对运输过程中的沉管管节的实时定位,确保沉管管节安全运输到目的地;
5、所述矢量推进单元是采用推力矢量技术的推进器,通过推进器的喷管偏转和推力偏转,使得推进器能够产生不同方向的推力,获得多余的控制力矩,实现沉管管节的姿态控制,并推动沉管管节向目的地前行;同时,矢量推进单元替换了动力定位单元中原有的推进装置,作为动力定位单元的一部分,将动力定位单元中不必要的推进装置简化和去除,由矢量推进单元的矢量推进器代替;且且根据沉管管节的结构大小不同,每个沉管管节的其他适当位置也布置有矢量推进单元的矢量推进器,多个矢量推进器相互配合,完成对沉管管节在运输过程中的矢量调整。
6、进一步地,所述将沉管管节单元看做一个船体包括:沉管管节具有结构大、重量高的特性,但沉管管节是中空的;将沉管管节单元看做一个船体的方法一共分两种方案:a)利用沉管管节自身的中空结构建立一个封闭的空间,给沉管管节提供下水的浮力,把沉管管节看做一个船体,该方案需要建立的封闭空间能给沉管管节提供足够的浮力;所述足够的浮力指建立的封闭空间的浮力大于沉管管节自身的重力;b)采用a)中的方案,若建立的封闭空间的浮力不大于沉管管节自身的重力的情况下,则在沉管管节底部适当位置加装浮力结构,使得建立的封闭空间提供的浮力和加装的浮力结构的浮力之和大于沉管管节的重力,此时,仍可把沉管管节看做一个船体;所述在沉管管节底部适当位置加装浮力结构指加装的浮力结构不能妨碍动力定位单元和矢量推进单元的正常工作运行。
7、进一步地,所述动力定位单元还设置有传感器模块和智能算法模块;所述传感器模块用于收集包括沉管管节运动姿态信息与位置变化信息,以及外界环境信息;所述外界环境信息包括外界风力、波浪和海流信息;并将收集的信息传递到智能算法模块,由智能算法模块对采集到的信息进行分析、处理和预测,并根据处理和预测的结果生成相应的指令,并将指令派发给矢量推进单元,由矢量推进单元根据指令对沉管管节进行姿态调整,确保沉管管节运输过程中的稳定性。
8、进一步地,所述智能算法模块布置有多种智能算法,多种智能算法包括线性回归、随机深林、神经网络和时间序列分析;不同的智能算法用于处理采集的不同数据;比如:沉管管节的位置信息具有线性特征,通过线性回归来处理;对于不具有线性特征的数据信息,则通过随机深林、神经网络和时间序列分析其中之一进行处理,同时,也可以采用多种智能算法相结合的方式进行分析和处理。
9、进一步地,所述沉管管节的姿态控制包括:沉管管节的姿态主要是六自由度姿态,包括横荡、纵荡、艏摇、纵摇、横摇和垂荡;传感器通过采集沉管管节的六自由度姿态信息和外界环境信息;智能控制算法根据采集的信息生成调节矢量推进单元的指令,指令中包括矢量推进单元的喷管偏转和推力偏转参数;矢量推进单元根据接收到的指令对喷管偏转和推力偏转进行对应的参数调整,达到沉管管节的六自由度姿态控制的目的,使得沉管管节能够稳定、安全的运输到目的地。
10、本发明的有益效果是:
11、本发明给出了一种基于动力定位装置的沉管矢量推进系统;具有以下优势:
12、运输方便:使沉管运输摆脱半潜驳浮运的限制,更加方便的到达安装区域,减轻运输负担。
13、定位位置准确:动力定位系统能够使沉管在水中实现非常准确的位置控制,对于需要在特定位置执行工作的任务非常重要,如海上施工、沉管安装等。
14、准确的方向控制:不仅可以实现位置的准确控制,还可以保持沉管在水平和垂直方向上的稳定性,确保朝向特定的方向;矢量推进系统使沉管能够实现前后、左右、甚至旋转的全向推进,提高了沉管的机动性,使其更灵活地应对不同的操纵需求。
15、高度灵活性:沉管使用动力定位系统和矢量推进系统能够在水中实现高度灵活且精准的操纵,包括定点悬停、动态定位、精确移动等操作,适用于需要在狭窄水域或复杂环境中进行作业的沉管。
16、增加作业效率:动力定位系统使沉管能够在特定位置上持续停留,有助于提高工作效率,尤其是在需要进行作业、安装或维修的情况下。
17、自动化操作:动力定位系统的智能算法可以实现一定程度的自动化操作,减少对人工操作的需求,提高作业的安全性和效率;传统的舵系统在沉管操控中有一定的滞后性,而矢量推进系统通过直接调整推进器方向,避免了舵的使用,提高了操纵的响应速度。
18、能够适应复杂环境:动力定位系统在复杂的海洋环境中表现出色,能够在恶劣的天气和浪涌条件下保持沉管的位置和方向。
- 还没有人留言评论。精彩留言会获得点赞!