一种跨域双体无人帆船
本发明涉及一种无人帆船,特别是一种水空跨域双体无人帆船。
背景技术:
1、无人帆船是一种以风能为驱动的海洋机器人,属于无人艇的一种。随着海洋开发与海洋观测需求的日益旺盛,国内外对无人帆船的研究越来越多。国外对无人帆船的研究起步较早,从设计方法、运动控制与路径规划算法等方面都有大量的研究成果,并且已经有较成熟的产品应用于海洋观测与海洋军事等应用场景中。相比之下,国内对无人帆船的研究起步较晚,但近年来也取得了一定的进展。
2、在国外,harbor wing科技公司推出了hwt x-1原型样机,该样机的翼帆可以360°旋转,结合风力推进模式和可折叠螺旋桨辅助推进,实现了长时间的航行。hwt x-3三体船续航能力大于三个月。ocean aero公司研制的submaran s10,采用风力推进和光伏发电辅助获取电能,是一款两栖海洋机器人,能够下潜至水下200米,展示了无人帆船在不同环境下的适应能力。saildrone公司推出的无人帆船系列,利用太阳能发电,航速可达5kn,续航力12个月,广泛应用于气候研究和海洋监测。此外,挪威offshore sensing as公司推出的sb met号成功完成了无人帆船首次横跨大西洋的任务,标志着无人帆船技术发展的一个重要里程碑。奥地利创新计算机科学学会的asv roboat则获得了世界机器人帆船锦标赛冠军,展现了其在无人帆船领域的领先地位。
3、国内方面,2018年在浙江宁波举办的wrsc赛事一定程度上证明了我国对无人帆船研究的重视和在该领域日益提高的国际影响力。上海交通大学长期致力于无人船的研究,其研究重点主要在帆船控制理论方面。哈尔滨工程大学研究了基于风力和太阳能的绿色无人帆船动力系统,开发了高效能量管理系统。武汉大学探索了无人帆船的多船协同作业技术,使用分布式控制和通信系统,实现多艘无人帆船的协同作业和数据共享。中国科学院声学研究所研发了用于水下声学探测的无人帆船平台,集成了高灵敏度水下声呐系统,实现对水下目标的精确探测和定位。中国科学院沈阳自动化研究所研发的“海鸥”号,实现了长时间海洋观测,展示了在航向控制、位置保持和路径跟踪等方面的良好表现。
4、尽管国内无人帆船的研究起步较晚,但近年来在理论研究和样机研制方面也取得了显著进展。例如,上海交通大学的研究团队重点关注无人帆船的控制理论,通过优化帆船的控制系统,提高了帆船在复杂水域环境中的自主航行能力。中国科学院沈阳自动化研究所则在无人帆船的航行机理、设计与优化等方面展开了深入研究,成功研发了“海鸥”号,该帆船采用风力驱动,利用太阳能为控制系统和传感器供电,实现了长时间海洋观测的目标。
5、总体来看,国内外无人帆船研究各有侧重。国外在技术创新和商业化应用方面领先,注重实际应用场景的验证和优化,积累了丰富的实用经验。国内虽然起步较晚,但在理论研究和技术开发方面取得了重要成果,政府和科研机构的支持力度也不断加大。未来,随着无人帆船技术的不断进步,其在海洋观测、环境保护和资源勘探等方面的应用前景将更加广阔。
6、目前,无人帆船的技术包括自主导航、避障、通信和能源管理等方面的创新,对无人帆船结构上的创新较少。无人帆船依靠风能提供驱动力,绿色无污染而固定翼飞机可实现大范围转移,如果将帆船与飞机进行融合设计,可充分发挥帆船长时间作业及飞机快速飞行的优势,极大提升无人平台的作业半径与响应速率,基于此,需要开展固定翼飞机与无人帆船的融合设计,进一步赋予帆船生命力,让其可以上天入海,跨域作业。本技术的新型无人帆船系统,将在未来的应用中发挥重要的作用。
技术实现思路
1、本发明的目的是为了解决上述问题,而提出一种跨域双体无人帆船。
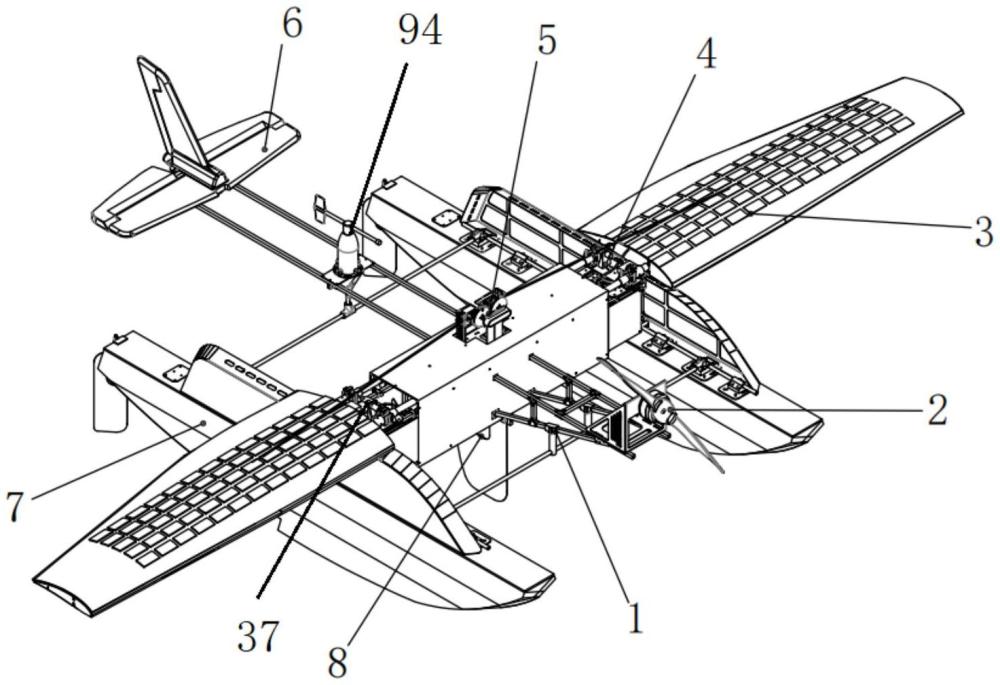
2、为实现上述目的,本发明的技术方案是:一种跨域双体无人帆船,包括安装平台、动力单元、机翼组件、转动组件、牵引组件、尾翼组件、浮力单元、水舵组件、传感器单元、处理单元,
3、动力单元,安装在安装平台前端,用于无人帆船变形为无人机时提供动力;
4、机翼组件,安装在安装平台两侧,水平时用作无人帆船的机翼,垂直时用作无人帆船的帆;
5、转动组件,连接机翼组件,用于当机翼组件作为帆时,控制帆迎风角度;
6、牵引组件,安装在安装平台上,并连接机翼组件,用于牵引机翼组件由水平机翼翻转变成垂直的帆;
7、尾翼组件,置于安装平台后端,用于控制无人帆船飞行过程的俯仰、偏航和倾斜以改变飞行姿态;
8、浮力单元,安装在安装平台两侧下面,为无人帆船提供浮力,使其漂浮在水面上;
9、水舵组件,用于控制无人帆船航行方向;
10、传感器,置于安装平台后部和牵引组件上,用于检测无人帆船周边环境和自身姿态;
11、处理单元,用于处理传感器信息并控制无人帆船的飞行和航行以及无人帆船的飞行模式和航行模式的转换。
12、进一步,安装平台,为船体的基本框架,呈“十”字形,包括动力安装台、侧面件、横梁套筒、安装连接支架、增高座、转角连接块、对接块、安装片,安装平台居中前端位置设有动力安装台,两侧各安装有一侧面件,位于“十”字中心上端装有横梁套筒,距离尾端位置设有一安装连接支架,尾端位置设有增高座,下端两侧位置依次设有转角连接块、对接块;转角连接块和对接块底部连接安装片;安装平台采用碳纤维管和碳纤维片搭建而成。
13、进一步,动力单元包括安装在动力安装台上的电机、用于驱动电机的电调,以及提供电力的电池以及安装在电机上的螺旋桨;电池采用6s航模电池;电机能提供12kg的拉力,为飞行提供充足动力。
14、进一步,机翼组件包括主梁、翼面件、电动推杆、圆头插销,主梁贯穿多个翼面件,翼面件沿着主梁方向均匀分布;沿着翼面件外形覆上一层蒙皮,主梁内分别套入电动推杆,电动推杆一端固定于主梁内部,另一端连接圆头插销;机翼组件的蒙皮外贴一层柔性太阳能贴片;柔性太阳能贴片成阵列式分布,为电池提供电力。
15、进一步,转动组件包括导向块、对接块、用于机翼组件作为帆时角度控制的偏航舵机、转台、转动平台基座及组成传动的主动齿轮和从动齿轮;机翼组件通过导向块、对接块、转台、转动平台基座连接偏航舵机及组成传动的主动齿轮和从动齿轮;对接块上搭配编码器实现精准检测机翼组件的转动角度。
16、进一步,牵引组件包括牵引平台基座、安装在牵引平台基座上的支撑架、安装在牵引平台基座上的一对牵引盘、牵引盘上缠绕有牵引绳。
17、进一步,尾翼组件包括平尾和垂尾,平尾和垂尾通过增高座与安装平台上延长出来的尾翼碳管上的的碳板连接,用于控制飞行时的俯仰和航行,同时增加水面航行的稳定性和灵活性。
18、进一步,水舵组件包括水舵机构和控制无人帆船航行方向的方向舵机构,两个方向舵机构分别固定在两个浮力单元的尾部,水舵机构通过水舵电机座与水舵板连接。
19、进一步,传感器单元包括gps定位器、imu姿态传感器、视觉传感器和风向传感器;gps定位器和imu姿态传感器位于安装平台的“十”字中心位置;视觉传感器位于牵引组件的支撑架上;风向传感器位于安装平台的安装连接支架上,用于采集相对风向角和相对风速。
20、进一步,处理单元包括航行控制器、用于处理传感器反馈的信号及发出指令进行控制的信息综合处理器、信号接收器,航行控制器用于控制无人帆船的飞行;信号接收器接收遥控信号并把信号发送给航行控制器,以实现对无人帆船的远程遥控。
21、本发明的有益效果:
22、(1)通过牵引机翼组件由水平状态变垂直状态,实现从固定翼无人机转变为无人帆船进行航行;机翼组件在完成状态改变时,通过机翼组件内部的电动推杆推动圆头插销实现机翼组件的限位,保证整机结构的稳定性;
23、(2)整机采用碳纤维和航空铝材,轻量化设计;安装平台通用化方便多种模块加装;
24、(3)具备多种传感器,能够实现无人帆船对周围环境的感知及自身状态和姿态的感知;融合机器视觉,可实现长时间远距离作业,自主规划路径巡航,及时躲避障碍物;
25、(4)具备飞行、航行两种运动模式,融合机器视觉,可实现长时间远距离作业,自主规划路径巡航,及自主躲避障碍物,依靠太阳能和风能提供动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
- 还没有人留言评论。精彩留言会获得点赞!