一种基于绳驱结构的刚柔耦合机器鱼
本发明属于机器人,更具体地,涉及一种基于绳驱结构的刚柔耦合机器鱼。
背景技术:
1、海洋和水下环境占据了地球的大部分面积,其中蕴含着丰富的资源,随着机器人技术的进步,各种水下机器人的设计和应用为海洋勘探和开发提供了新的解决方案。近年来,仿生机器鱼作为一种新型水下机器人,因其出色的环境适应性和潜在应用价值得到了快速发展。
2、在现阶段的研究中,根据不同的应用场景和仿生对象,仿生机器鱼的驱动结构大致可分为单刚性关节、多刚性关节、软体智能材料和拉线结构。这些设计结构都共同促进了仿生机器鱼和水下机器人领域的发展。传统的单关节机器鱼一般采用刚性尾鳍来产生前进的动力,控制简单。但是该结构与真实的鱼类运动模态差别较大,仿生程度较低,同时存在推进效率不高的问题。多关节机器鱼可以实现更多的游动姿态,诸如直线迅游、c形转弯等,该种设计多为单电机驱动单关节,并通过关节间节律运动来有效模拟鱼类的柔顺摆动和游动姿态,但随着关节的引入,控制的复杂程度以及对驱动电机的要求也随之提高。各种新型软体材料的成功应用也为材料特性驱动下的机器鱼研发提供了新的可能。这些驱动大多数建立在功能性材料在不同特定条件下的形变基础上,因此也具有着绝大多数功能材料的明显局限,即严苛的触发条件和较低的驱动效率,并限制了机器鱼的搭载和作业能力。因此,一种新的,能模仿鱼类柔顺游动和运动模态的,保持较高推进效率,且控制相对简单的仿生机器鱼具有较高的科研价值和潜在工程应用能力。
3、综上,目前仍缺乏兼顾具有运动柔顺性的、结构相对简单的仿生机器鱼设计方法。也缺少一种控制模型相对简单、驱动效率较高的具有多场景普适性的设计方法,且运用现有的结构机制与设计理念难以进一步提升仿生机器鱼的能力上限。
4、需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的主要目的在于解决上述背景技术中存在的问题,提供一种基于绳驱结构的刚柔耦合机器鱼。
2、为实现上述目的,本发明采用以下技术方案:
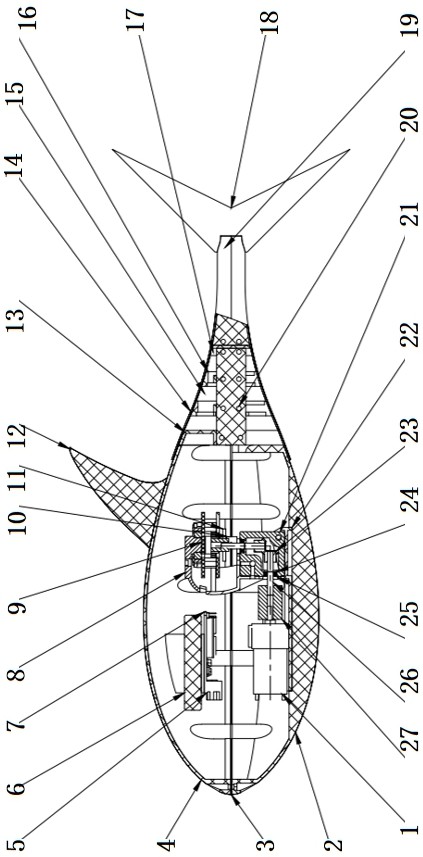
3、一种基于绳驱张拉结构的刚柔耦合机器鱼,包括刚性头部、柔性摆动部以及绳驱张拉机构:
4、所述刚性头部包括上刚性壳体和下刚性壳体,二者配合形成封闭空间,内部安装所述绳驱张拉机构;所述绳驱张拉机构将驱动绳作用到所述柔性摆动部上,通过张拉驱动绳而使得所述柔性摆动部进行摆动;
5、所述柔性摆动部包括刚性骨架、前中置片、后中置片和柔性蒙皮,所述柔性蒙皮分为前部中空部分和后部实心部分,所述刚性骨架与所述前中置片设置在所述前部中空部分内,所述刚性骨架包括与所述前中置片相连的多个骨架单元,所述多个骨架单元将所述柔性蒙皮的前部中空部分撑开形成鱼尾形的主动摆动部,位于后部的骨架单元与所述后中置片与相连,所述后中置片与所述后部实心部的空心槽过盈配合,并与机器鱼的尾鳍连接,形成被动摆动部;各骨架单元均设有穿绳孔供驱动绳进行张拉,所述前中置片采用挠性材料,驱动绳张拉时带动各骨架单元及所述前中置片进行对称和非对称弯曲,实现主动摆动部分对称和非对称摆动,所述后中置片在相对静止的骨架单元上以悬臂梁模式摆动,从而提高被动摆动部的摆频和输出功率。
6、进一步地,还包括设置于所述上刚性壳体和所述下刚性壳体之间的tpu夹紧片;所述上刚性壳体和所述下刚性壳体通过螺栓连接,并与所述tpu(thermoplasticpolyurethane,热塑性聚氨酯)夹紧片单元夹紧。所述tpu夹紧片邵氏硬度较小,具有一定的柔性,相比所述上刚性壳体与所述的下刚性壳体直接相连,接触面积更大,压力分布更均匀,密封性更好。
7、进一步地,所述多个骨架单元为四个片状骨架单元,所述四个片状骨架单元在轴侧开有两穿绳孔,驱动绳在靠后的第四个刚性骨架单元截止,靠前的第一、二、三刚性骨架单元侧面开有两个通孔,通过连接件与所述前中置片连接;所述第四刚性骨架单元侧面开有四个通孔,前列两通孔通过连接件与所述前中置片连接,后列两通孔通过连接件与所述后中置片连接。 四个刚性骨架单元将所述柔性蒙皮的前部中空部张紧为所述刚柔耦合机器鱼柔性摆动部的主动摆动部。
8、进一步地,所述绳驱张拉机构包括驱动电机、换向单元和对称张拉单元,所述驱动电机通过所述换向单元耦合到所述对称张拉单元,所述换向单元用于对电机扭矩进行换向,从而调控运动模态,所述对称张拉单元由两个对称分布的绕线单元构成,两个绕线单元分别对两根驱动绳实施张拉,所述绕线单元包括凸台齿轮、绕线盘和固线构件,所述凸台齿轮与所述绕线盘同轴转动,所述绕线盘与所述固线构件连接,带动所述固线构件转动,所述固线构件用于夹紧驱动绳。
9、进一步地,所述换向单元包括换向器单元、输入轴单元、输出轴单元以及至少一对相互啮合的锥齿轮单元,所述输入轴单元和所述输出轴单元分别与所述驱动电机和对称张拉单元相耦合,所述锥齿轮单元实现电机输出扭矩至对称张拉单元的直角换向;所述换向器单元包括换向器壳体,在所述换向器壳体外设有至少两个深沟球轴承单元,所述深沟球轴承单元用以支持所述输入轴单元和输出轴单元的转动;所述输入轴单元和输出轴单元上分别设有卡槽,每个卡槽配合有卡簧,卡簧的上侧与换向器壳体相接触,通过锥齿轮的啮合和卡簧的干涉实现输出轴和输入轴单元与换向器壳体的定位;所述换向单元通过联轴器与所述驱动电机连接,实现电机动力传递。
10、进一步地,所述凸台齿轮和所述绕线盘中间开有等孔径的通孔,与子母螺丝的母螺丝过盈配合;所述凸台齿轮与所述绕线盘同轴;所述子母螺丝的子螺丝在所述绕线盘的下侧与所述母螺丝配合后,对所述绕线盘限位;所述凸台齿轮与所述换向器单元的输出轴上的配合齿轮啮合,所述输出轴上的配合齿轮与所述输出轴过盈配合,以带动所述凸台齿轮和所述绕线盘转动。
11、进一步地,所述绳驱张拉机构还包括固定架单元,所述固定架单元包络所述对称张拉单元;所述固定架单元包括上夹紧板、下夹紧板、固定外壳、子固定片和子固定壳;所述上夹紧板和所述下夹紧板之间夹紧所述凸台齿轮,所述子固定壳通过螺柱连接并夹紧所述对称张拉单元;所述子固定片与所述子固定壳通过螺栓连接并将所述子固定外壳与所述固定外壳连接;所述固定外壳通过螺栓与所述换向器单元的换向器壳体连接。
12、进一步地,所述刚性头部的封闭空间内还设置有电机固定架,所述驱动电机与所述电机固定架通过螺栓连接,所述电机固定架与所述下刚性壳体连接。
13、进一步地,所述刚性头部采用椭圆曲线与抛物线的非线性耦合进行流线型壳体的参数化设计,遵循以下函数方程:
14、
15、其中, d为截面最大直径; l c为前半段头部长度; l r为后半段鱼体长度。
16、进一步地, d取75mm, l c取118.5mm, l r取185mm。
17、本发明一些实施例中,一种刚柔耦合机器鱼,包括刚性头部、柔性摆动部和绳驱张拉机构,其中:所述刚性头部包括上刚性壳体、下刚性壳体和中层tpu夹紧片,所述刚性头部与所述柔性摆动部以三层静密封的方式相接。当机器鱼直行游动时,所述刚性头部主要降低机器鱼行进阻力,所述柔性摆动部主要产生尾部涡流,提供机器鱼前进的推进力;当机器鱼进行左右转向时,所述柔性摆动部占主导地位,机器鱼通过所述柔性摆动部的非对称摆动实现左右转向。所述刚性头部内集中了机器鱼主要功能模块和重量分布,也决定了机器鱼的整体形状。
18、在一些实施例中,所述柔性摆动部包括尾部四个片状骨架单元、尾鳍单元、前中置片、后中置片和硅胶蒙皮。所述四个片状骨架单元通过螺栓与所述前中置片等距连接。所述片状骨架单元将所述硅胶蒙皮的前部中空部分撑开,形成所述机器鱼的鱼尾形的主动摆动部分。所述四个片状骨架单元与所述硅胶蒙皮紧密贴合,所述硅胶蒙皮使得所述柔性摆动部具有密封性。所述后中置片与所述硅胶蒙皮的后部实心部分配合,形成所述柔性摆动部的被动摆动部分。
19、在一些实施例中,本发明在硅胶蒙皮的后部实心部中间开有空心槽,所述空心槽的形状是所述后中置片的等距缩放;所述后中置片与所述硅胶蒙皮在后部实心部的空心槽过盈配合,形成所述柔性摆动部的被动摆动部分;相比无所述后中置片的被动摆动部分,有所述后中置片的被动摆动部分摆频更快。
20、在一些实施例中,所述上刚性壳体采双层设计,内部有一平台板;所述平台板上侧放置电源模块和升压模块,所述电源模块和升压模块通过双面泡沫胶与所述平台板相互粘接固定;所述平台板下侧防止控制板与蓝牙模块;所述蓝牙与所述控制板通过引脚相连,所述控制板与所述平台通过泡沫胶相互粘接;所述上刚性壳体外侧分布九通孔,通孔内嵌螺母套;所述下刚性壳体也分布有与所述上刚性壳体对应的螺纹孔。
21、在一些实施例中,所述上刚性壳体和下刚性壳体均喷涂防水漆,以防止发生渗水、漏水。壳体外形为流线型,长度、宽度、高度、截面采用参数化设计,相互配合后构成与鲹科鱼类相应的纺锤形空间。
22、本发明具有如下有益效果:
23、本发明提供了一种基于绳驱张拉结构的刚柔耦合机器鱼的设计方法,解决了传统机器鱼体型庞大繁杂、控制系统复杂、游动姿态僵硬、驱动效率较低的问题。该机器鱼结合了刚体机器鱼驱动效率高和软体机器鱼非结构化环境适应能力强的优点,不仅具备较高的输出功率,具有较好的潜在工程应用价值,而且通过绳驱柔性尾部设计,在较高水平利用空间、极大简化了控制模型的同时实现了鱼尾摆动的连续性和柔顺性,从而实现对鱼类的较高仿生度、推进效率和简易控制模型的较好结合。这种刚柔耦合机器鱼为各种复杂的水下和海洋的非结构化环境下,新型水下机器人尤其是仿生机器鱼的设计提供了高效、新颖的解决方案,满足了控制容易、效率高、能耗低的要求。
24、本发明机器鱼的柔性摆动部是一个由单电机驱动的张拉摆动系统,由片状骨架单元组成的主动摆动部和中置片内嵌的被动摆动部构成。与现有机器鱼摆动部不同的是,柔性摆动部的分段设计更好地拟合了鱼类真实游动的尾部状态,同时,内嵌采用回弹性好、耐疲劳的材料的中置片的被动摆动部在保证柔性尾部柔顺性的同时提高了其与骨架单元相连部分的局部刚度,从而提高了被动摆动部的摆动频率,同时提高了其输出功率,克服了传统软体机器鱼游动速度慢、输出力不足、输出功率低的问题。
25、本发明实施例对绳驱张拉机构进行了优化,采用电机结合换向器和齿轮箱的张拉系统,在体积和空间极为有限的条件下实现了集成度较高的机构设计。利用该绳驱张拉机构进行驱动绳的张拉,进而带动骨架单元实现柔性摆动部的主动部弯曲,主动部带动被动部,进而实现整个摆动部的对称、非对称和高频摆动。在电机持续转动的情况下,和现在大多数绳驱机器鱼所采用的单一舵机设计的不同,电机连带齿轮转动拉线可以在绳驱张拉的换向上更加平滑,驱动的摆动部可以表现出更高的驱动频率和更拟合正弦输出波的波形,克服了刚体机器鱼摆动姿态僵硬、连续性低、灵活性差的固有问题。
26、刚性头部优选采用椭圆曲线与抛物线的非线性耦合进行流线型壳体的参数化设计,遵循所提的函数方程,得到的形状极大降低了机器鱼游动时的行进阻力。物体在流体中运动时所受的阻力,是由内摩擦和涡旋两个原因所造成的。在速度很小时,阻力的大小主要决定于内摩擦。在速度较大时主要决定于涡旋,速度越快,涡旋的作用越大。为了有效地减小阻力,就要设法避免涡旋的形成。通过对鱼类的游泳进行观察,发现凡是游得快的鱼,如带鱼、鲨鱼等,都具有一种特殊的雪茄烟式的形状。又通过大量实验得出结论,将机器鱼做成上述形状,能减小涡旋作用或避免涡旋的形成,因而大大地减低了流体对它的阻力。
27、本发明实施例中的其他有益效果将在下文中进一步述及。
- 还没有人留言评论。精彩留言会获得点赞!