一种具有主被动波浪补偿功能的海上换乘栈桥及工作方法
本发明涉及船舶与海洋工程领域的技术装备,具体地,涉及一种具有主被动波浪补偿功能的海上换乘栈桥及工作方法。
背景技术:
1、波浪补偿海上换乘栈桥为实现海上人员和货物的稳定、安全、经济、可靠的转运提供了一种有效解决方案,可在两船之间建立起安全的人员和货物转运通道。安装有波浪补偿海上换乘栈桥的船舶称为母船,另一艘船舶称为目标船。母船与目标船在风、浪、流影响下,均会产生横摇、纵摇、艏摇、横荡、纵荡和升沉六个自由度的摇荡运动,对波浪补偿海上换乘栈桥产生扰动,不可避免地对海上人员和货物转运造成安全隐患。
2、中国发明专利cn114852260a公开了一种具有补偿和起重功能的柔性海上可伸缩廊桥,包括三自由度并联机构稳定平台、回转节、底座、起重机主体、柔性可伸缩舷梯,三自由度并联机构稳定平台为廊桥提供横摇、纵摇和升沉三自由度运动补偿,起重机主体和柔性可伸缩舷梯协同运动补偿三自由度并联机构稳定平台未补偿的残余的船舶升沉运动,用于海洋平台与船舶之间的人员转运,但该廊桥的结构复杂、能耗高,且廊桥的底座安装于三自由度并联机构稳定平台上,会增加母船与目标船的干舷差对廊桥设计技术指标的影响。
3、中国发明专利cn113232768a公开了一种具有波浪补偿功能的海上换乘栈桥及其工作方法,包括回转基座、可伸缩桥体、俯仰装置、登乘平台和升沉机构,回转基座、可伸缩桥体、俯仰装置和升沉机构协调运动,补偿船舶摇荡运动对换乘栈桥产生的扰动,可用于两艘船舶之间的人员转运,但是当该换乘栈桥工作在主动波浪补偿模式时,回转基座、可伸缩桥体、俯仰装置和登乘平台,加大了升沉机构的外负载,导致升沉机构能耗大。
技术实现思路
1、为解决现有技术存在的上述问题,本发明要提出一种具有主被动波浪补偿功能的海上换乘栈桥及工作方法,能够使着陆装置一定程度抵消母船与目标船的干舷差,且换乘栈桥机械结构简单、控制简单、能耗低。
2、为实现上述目的,本发明的技术方案如下:
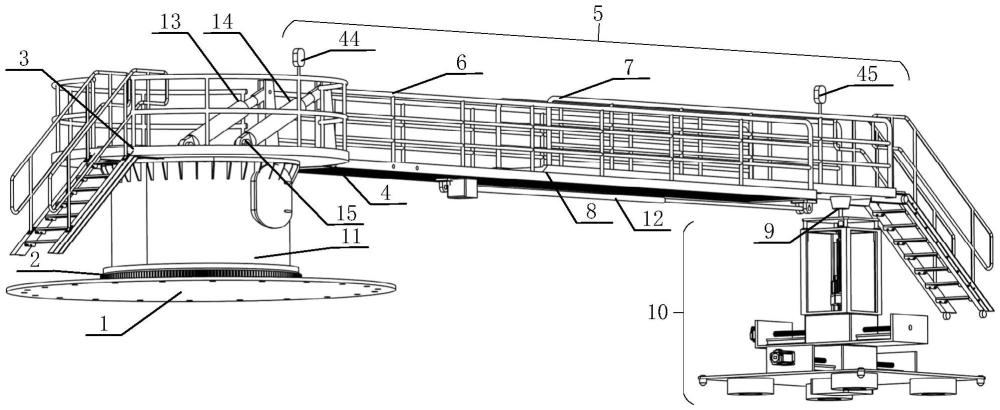
3、一种具有主被动波浪补偿功能的海上换乘栈桥,包括栈桥系统、着陆装置、测量系统、栈桥波浪补偿控制系统和着陆装置波浪补偿控制系统。
4、所述的栈桥系统具有回转、俯仰和伸缩三个运动自由度,栈桥系统包括栈桥底座、回转支承、换乘平台、桥体和液压执行机构。所述的栈桥底座固定安装于母船甲板上;所述的回转支承的外圈下端面固定安装于栈桥底座上;所述的换乘平台固定安装于回转支承内圈的上端面,换乘平台上设置转轴;所述的桥体包括固定桥体和可伸缩桥体;所述的固定桥体通过转轴与换乘平台铰接,且固定桥体上面设置滑轨;所述的可伸缩桥体通过滑轨与固定桥体滑动连接,可伸缩桥体右端下侧通过球铰与着陆装置铰接;所述的液压执行机构包括液压马达、第一液压缸、第二液压缸和第三液压缸;所述的液压马达驱动回转支承转动,带动换乘平台连同桥体一起转动;所述的第一液压缸的缸筒通过转动副与固定桥体铰接、第一液压缸的活塞杆通过转动副与可伸缩桥体铰接,驱动可伸缩桥体沿着固定桥体滑动;所述的第二液压缸和第三液压缸的缸筒均通过转动副与换乘平台铰接,第二液压缸和第三液压缸的活塞杆均通过转动副与固定桥体左端铰接,第二液压缸和第三液压缸协同驱动桥体绕转轴转动。
5、所述的着陆装置具有三个平动自由度,着陆装置包括着陆基座、两个轨道直线滑台、固定架、支撑台、四根导向杆、伺服电缸和电磁吸盘;所述的着陆基座的上表面和下表面为矩形,下表面设置四个橡胶缓冲垫;所述的轨道直线滑台包括导轨、滑块和伺服电机,所述两个轨道直线滑台分别为第一轨道直线滑台和第二轨道直线滑台,所述的第一轨道直线滑台的导轨固定安装于着陆基座上表面上,所述的第二轨道直线滑台的导轨固定安装于第一轨道直线滑台的滑块上表面上,且与第一轨道直线滑台的导轨垂直,第一轨道直线滑台和第二轨道直线滑台各自的伺服电机驱动各自的滑块沿着各自导轨移动,分别补偿目标船的六自由度运动对球铰的水平面横、纵位置的干扰;所述的固定架为立方体框架,其下端面封闭、上端面开口,下端面固定安装于第二轨道直线滑台的滑块上表面,上端面上四个角分别设置四个法兰直线导向轴承,法兰直线导向轴承与固定架的上端面垂直;所述的支撑台上表面几何中心处固定安装连接杆,所述连接杆顶端安装球铰,所述球铰与桥体铰接;所述的四根导向杆分别安装于支撑台下表面的四个角上,并分别插入四个直线导向轴承孔中;所述的伺服电缸的缸筒通过转动副连接于固定架下端面的几何中心位置,伺服电缸的伸缩杆通过转动副连接于支撑台的几何中心位置,伺服电缸通过其伺服电机驱动支撑台沿着导向杆移动,补偿目标船的六自由度运动对球铰升沉位置的干扰;所述的电磁吸盘安装于着陆基座下表面的几何中心位置,用于将着陆基座固定在目标船甲板上的栈桥着陆装置搭接区域。
6、所述的测量系统包括位移传感器、第一编码器、第二编码器、第三编码器、第四编码器、第五编码器、第一惯性测量单元、第二惯性测量单元、第一激光测距仪、第二激光测距仪、第三激光测距仪和第四激光测距仪。所述的位移传感器用于测量桥体的伸缩位移;所述的第一编码器和第二编码器分别用于测量第一轨道直线滑台和第二轨道直线滑台的位移,所述的第三编码器用于测量伺服电缸的伸缩位移;所述的第四编码器用于测量栈桥换乘平台的回转角;所述的第五编码器用于测量桥体绕转轴的俯仰角;所述的第一惯性测量单元用于测量母船在栈桥底座处的六个自由度的运动位姿状态;所述的第二惯性测量单元用于测量目标船在其甲板上搭接区域中心的六个自由度运动位姿状态;所述的第一激光测距仪、第二激光测距仪、第三激光测距仪和第四激光测距仪分别安装于着陆基座的四个角上,用于测量着陆基座四个角分别距目标船甲板的距离。
7、所述的栈桥波浪补偿控制系统包括栈桥波浪补偿控制器和轨迹规划模块。
8、所述的栈桥波浪补偿控制器接收来自测量系统的桥体伸缩位移和俯仰角、换乘平台的回转角、母船在栈桥底座处的六个自由度运动位姿状态和目标船在其甲板上搭接区域中心的六个自由度运动位姿状态信息,据此解算出使球铰球心与目标船甲板上的搭接区域保持某一固定的期望距离不变的液压马达期望转动量和第一液压缸、第二液压缸、第三液压缸各自期望伸缩位移,基于此,输出液压马达、第一液压缸、第二液压缸和第三液压缸控制信号,驱动栈桥进行回转、俯仰、伸缩运动,补偿母船六自由度运动对栈桥桥体右端位置的干扰,使桥体下的球铰球心跟随目标船甲板上的搭接区域运动,即使桥体下球铰球心与目标船甲板上的搭接区域保持规定的固定期望距离不变。所述的栈桥波浪补偿控制系统在这种情况下的工作模式称为随动工作模式。
9、所述的轨迹规划模块接收来自测量系统的着陆基座四个角距目标船甲板的距离信息,基于此,并考虑当前球铰球心距着陆基座下表面的距离,规划出桥体下球铰从其距目标船甲板上的搭接区域所述规定的固定期望距离的位置向目标船甲板上的搭接区域运动过程中球铰球心的期望运动轨迹;所述的栈桥波浪补偿控制器根据所接收到的来自测量系统的桥体伸缩位移和俯仰角、换乘平台的回转角、母船在栈桥底座处的六个自由度运动位姿状态和目标船在其甲板上搭接区域中心的六个自由度运动位姿状态信息,及轨迹规划模块所规划出的球铰球心期望运动轨迹,解算出使球铰球心按照其期望运动轨迹运动的液压马达期望转动量和第一液压缸、第二液压缸、第三液压缸各自期望伸缩位移,基于此,输出液压马达、第一液压缸、第二液压缸和第三液压缸的控制信号,驱动栈桥进行回转、俯仰、伸缩运动,补偿母船六自由度运动对栈桥桥体右端位置的干扰,使栈桥着陆装置从球铰球心距目标船甲板上的搭接区域所述规定的固定期望距离的位置向目标船甲板上的搭接区域运动,并使着陆装置着陆于目标船甲板上的搭接区域;所述的栈桥波浪补偿控制系统在这种情况下的工作模式称为自动搭接工作模式。
10、所述的着陆装置波浪补偿控制系统包括着陆装置波浪补偿控制器、启动按钮和换乘按钮。
11、所述的着陆装置波浪补偿控制器接收来自测量系统的第一轨道直线滑台的位移、第二轨道直线滑台的位移、伺服电缸的伸缩位移和目标船在其甲板上搭接区域中心的六个自由度运动位姿状态信息,据此解算出使桥体右端下面的球铰球心保持在着陆装置着陆于目标船甲板上搭接区域时球铰球心所在位置的第一轨道直线滑台期望位移、第二轨道直线滑台期望位移和伺服电缸期望伸缩位移,基于此,输出第一轨道直线滑台的伺服电机、第二轨道直线滑台的伺服电机和伺服电缸的伺服电机的控制信号,驱动着陆装置的第一轨道直线滑台和第二轨道直线滑台的滑块移动、支撑台沿着导向杆移动,补偿目标船六自由度运动对栈桥桥体右端位置的干扰,使桥体下球铰球心保持着陆装置着陆于目标船甲板上搭接区域时球铰球心所在的位置不变;所述的着陆装置波浪补偿控制系统在这种情况下的工作模式称为着陆主动补偿工作模式。
12、进一步地,所述的着陆装置波浪补偿控制系统停止运行,第一轨道直线滑台、第二轨道直线滑台以及伺服电缸保持在当前位置不动,着陆装置波浪补偿控制系统在这种情况下的工作模式称为换乘工作模式。
13、进一步地,所述的栈桥波浪补偿控制系统无论工作于随动工作模式,还是自动搭接工作模式,均为主动波浪补偿方式。
14、所述的启动按钮用于启动着陆装置波浪补偿控制系统工作;所述的换乘按钮用于启动着陆装置波浪补偿控制系统的换乘工作模式。
15、进一步地,所述的着陆基座的下表面四个角处设置四个橡胶缓冲垫。
16、一种具有主被动波浪补偿功能的海上换乘栈桥的搭设及工作方法,包括如下步骤:
17、a、母船上安装动力定位系统,目标船通过缆绳并靠母船;
18、b、操作者操控着陆装置的第一轨道直线滑台、第二轨道直线滑台和伺服电缸运行到各自行程的中位;
19、c、操作者操控第二液压缸和第三液压缸,驱动桥体仰起;然后操控液压马达、驱动换乘平台回转,并操控第一液压缸、驱动桥体伸缩,使栈桥着陆装置移动到目标船甲板上搭接区域正上方安全距离处;操作者再根据着陆基座四个角分别距目标船甲板的距离,操控第二液压缸和第三液压缸、驱动桥体下俯,使栈桥着陆装置向到目标船甲板上的搭接区域靠近,并让着陆基座与搭接区域保持安全距离;
20、d、操作者开启栈桥波浪补偿控制系统随动工作模式,补偿母船六自由度运动对栈桥桥体右端位置的干扰,使桥体下球铰球心跟随目标船甲板上的搭接区域运动,与目标船甲板上的搭接区域保持固定的期望距离不变;
21、e、切换到栈桥波浪补偿控制系统自动搭接工作模式,使栈桥着陆装置从球铰球心距目标船甲板上的搭接区域所述规定的固定期望距离的位置向目标船甲板上的搭接区域运动,并使着陆装置着陆于目标船甲板上的搭接区域,之后,液压马达、第一液压缸、第二液压缸和第三液压缸卸荷,同时启动电磁吸盘,使得栈桥着陆装置吸附在目标船甲板上的搭接区域,完成栈桥与目标船的搭接;搭接后,栈桥被动地进行回转、伸缩和俯仰运动,补偿两船摇荡运动;
22、f、母船上的被转运人员或物资到达栈桥的换乘平台上;操作者按动启动按钮,开启着陆装置波浪补偿控制系统着陆主动补偿工作模式,补偿目标船六自由度运动对栈桥桥体右端位置的干扰,使桥体下球铰球心保持着陆装置着陆于目标船甲板上搭接区域时球铰球心所在的位置不变;
23、g、当被转运人员或物资来到桥体右端的登陆区域后,被转运人员按动换乘按钮,将着陆装置波浪补偿控制系统切换到换乘工作模式,使桥体右端相对于目标船甲板不发生移动,之后登陆区域上的被转运人员或物资安全的到达目标船的甲板上。
24、与现有技术相比,本发明具有以下有益效果:
25、1、本发明的换乘栈桥在完成自动搭接后,着陆基座通过电磁吸盘吸附于目标船甲板上的搭接区域,因此,只需要控制着陆装置主动补偿目标船六自由度运动对栈桥桥体右端位置的干扰,就可使球铰球心保持着陆装置着陆于目标船甲板上搭接区域时球铰球心所在的位置不变,而栈桥受母船六自由度摇荡运动干扰可被动地进行回转、伸缩和俯仰运动,补偿母船这些摇荡运动,控制简单。
26、2、本发明的着陆装置相当于中国发明专利cn114852260a中的三自由度并联机构稳定平台,可一定程度抵消母船与目标船的干舷差,采用了两个导轨直线滑台和一个伺服电缸构成的串联机构,补偿目标船六自由度运动对着陆装置支撑台上链接于栈桥桥体右端位置的干扰,结构简单,且着陆装置和栈桥底座共同承载换乘栈桥的桥体及其上人员或货物,降低了着陆装置所需的动力,降低了能耗。
- 还没有人留言评论。精彩留言会获得点赞!