使用混合电力推进系统的垂直起降航空器及其控制方法与流程
1.本发明涉及一种使用混合电力推进系统的垂直起降航空器。
背景技术:
2.诸如直升机,基于旋翼的垂直起降航空器的优点是无需额外的起降设施或设备,但在高速飞行、长时间滞空及高空性能方面低于同级别的固定翼机体。
3.与可以选择从电动机到喷气式引擎的多种推进系统的固定翼机体相比,对于依靠引擎的轴马力的垂直起降航空器而言,其机体重量越轻,推进系统的选择就越受限。
4.尤其,对于最大起飞重量(maximum take
‑
off weight,mtow)在10~300kg左右的小型航空器中广泛使用的往复式发动机而言,其功率重量比约为2,比值非常小。为了提供垂直起降所需的动力,引擎的体积和重量会相比同等级的固定翼机体要大很多,相比航空器空机重量(empty weight),推进系统的重量过重,所以很难保证任务所需的有效载重(payload)及滞空时间(endurance time)。
5.因此,小型航空器广泛采用使用电池和电动机的推进系统,但由于具有低能量密度的现有电池技术的限制,无法提供任务所需的充足的滞空时间。
6.为了实现长时间滞空,需要高比能(specific energy)的能量来源和可转换其的动力装置,然而,为了实现垂直起降,则需要高比功率(specific power)的能量来源和可转换其的装置。
7.但是,因为尚无高比能及高比功率的能量来源和动力发生装置,一般情况下为了实现长时间滞空,航空器会搭载高比能(specific energy)的能量来源和动力发生装置。
8.航空器的垂直起降需要很多的能量,且包括动力发生装置在内的推进系统需设计为能够为垂直起降提供充足的动力,从而,在这种结构中,整体推进系统的重量会比飞行所需的重量重很多,可能会造成航空器重量及推进系统的低效。
9.近来,人们不断努力,以通过同时使用高比能和高比动力的能量来源来减轻推进系统的重量、提高效率并实现更长的滞空时间。
10.并且,对于垂直起降而言,如航空器相关普通技术人员所理解,垂直起降飞行是一种稳定性相当低的飞行方式。垂直起降航空器必然会经历沿垂直方向起飞并过渡至巡航飞行的过程,但这个过度过程的稳定性相当低,且相当危险。特别是倾转旋翼式垂直起降航空器有一个必然的结构性问题,就是在进入稳定巡航飞行前就需要在空中进行倾斜,使得驱动源不稳定。
11.以美国海军陆战队使用的代表性的倾转旋翼航空器v
‑
22鱼鹰为例,在起飞后过渡的过程中坠机的案例较多,甚至在日本冲绳曾因鱼鹰的稳定性争议而引发了反对部署美军鱼鹰的大规模示威活动(日本“要求美国重新研究冲绳鱼鹰部署”2013.8.5京乡新闻http://news.khan.co.kr/khnews/khanartview.html?artid=201308052211075,
‘
鱼鹰’缘何在日本导致10万人反对示威[分析]反对在冲绳部署事故多发的美国产垂直起降机鱼鹰2012.9.10,参照pressian http://www.pressian.com/news/article.html?no=64120#
09t0)。即,连普通人也知道与其他众多的固定翼机不同,进行倾斜的垂直起降机的飞行稳定性较低。
[0012]
现有技术文献
[0013]
专利文献
[0014]
专利文献1:kr10
‑
2011
‑
0112402a
[0015]
专利文献2:kr10
‑
1667330b1
[0016]
专利文献3:kr10
‑
1615486b1
[0017]
专利文献4:kr10
‑
1638964b1
技术实现要素:
[0018]
发明所要解决的问题
[0019]
因此,本发明所要解决的技术问题在于,旨在提供一种使用混合电力推进系统的垂直起降航空器及其控制方法,其通过解决垂直起降和巡航飞行之间的较大推力之差,从而能够有效利用可用能量。
[0020]
如在上述背景技术中所了解,本发明通过避免倾转旋翼方式,从而,可以从根本上排除用于进行倾斜的机械结构。由此可以减轻航空器重量,从而延长续航距离。并且,通过排除驱动源的倾斜过程,可实现稳定的垂直起降及巡航飞行。
[0021]
用于解决问题的方案
[0022]
用于实现上述技术问题的根据本发明实施例的使用混合电力推进系统的垂直起降航空器,包括:飞行体1,其机身2具有固定翼4;引擎10,其安装在上述飞行体1,且通过燃烧燃料来产生动力;发电机20,其与上述引擎10连接,以生产电力;电力管理装置40,其管理上述电力;电池管理系统60,由上述电力管理装置40提供的电力充入上述电池管理系统60;发动机80,其安装在上述固定翼4,且从上述电池管理系统60接收电源以进行动作;第1螺旋桨81,其通过上述发动机80进行动作;第2螺旋桨82,其通过上述引擎10进行动作;及控制部50,其控制上述引擎10、上述发电机20、上述发动机80及上述第2螺旋桨82的动作,
[0023]
上述控制部50,当上述飞行体1进行垂直起降时,控制上述发电机20、上述电力管理装置40及上述电池管理系统60同时向上述发动机80提供电源。
[0024]
并且,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器的上述控制部50而言,当上述飞行体1进行垂直起降时,对上述第2螺旋桨82的推力进行降低控制,使得上述第2螺旋桨82的推力完全不影响飞行体1的飞行。
[0025]
并且,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器的上述控制部50而言,当上述飞行体1进行垂直起降时,其可以控制切断上述引擎10和上述第2螺旋桨82的动力连接。
[0026]
并且,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器的上述控制部50而言,当上述飞行体1进行巡航飞行或过渡飞行时,其可以控制增强上述第2螺旋桨82的推力,且控制由上述发电机20生产的富余电力充入上述电池管理系统60的电池62。
[0027]
用于实现上述技术问题的根据本发明实施例的使用混合电力推进系统的垂直起降航空器的控制方法,包括:第一步骤,产生动力;第二步骤,通过上述动力启动发电机20来生产电力;第三步骤,通过电力管理装置40向飞行体1的各个结构分配并提供电力;第四步
骤,上述电力的一部分充入电池管理系统60的电池62;及第五步骤,通过发动机80启动第1螺旋桨81,
[0028]
并且,该方法包括:当上述飞行体1进行垂直上升或垂直下降时,控制上述发电机20、上述电力管理装置40及上述电池62同时向上述发动机80提供电源。
[0029]
并且,根据本发明实施例的使用混合电力推进系统的垂直起降航空器的控制方法,可以包括:当上述飞行体1进行垂直起降时,对用于巡航的上述第2螺旋桨82的推力进行降低控制,使得用于巡航的上述第2螺旋桨82的推力完全不影响飞行体1的飞行。更具体地,可以将第2螺旋桨82的攻角从0度调整为90度或具有负值。
[0030]
并且,根据本发明实施例的使用混合电力推进系统的垂直起降航空器的控制方法,可以包括:当上述飞行体1进行垂直起降时,控制切断上述引擎10和上述第2螺旋桨82的动力连接。
[0031]
并且,根据本发明实施例的使用混合电力推进系统的垂直起降航空器的控制方法,可以包括:当上述飞行体1进行巡航飞行或过渡飞行时,控制增强上述第2螺旋桨82的推力,且控制由上述发电机20生产的富余电力充入上述电池管理系统60的电池62。
[0032]
其他实施例的具体事项包含在详细说明及附图。
[0033]
发明效果
[0034]
构成为如上的,根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,即使在进行垂直起降时,引擎中产生的动力传递至第2螺旋桨,也可以保持顺浆(feathering)状态,以减少动力损失;当进行过渡飞行时,可在过度飞行高度调整第2螺旋桨的攻角(angle of attack),来调整所期望的推力;当进行巡航飞行时,可调整第2螺旋桨的攻角(angle of attack)来产生所需的推力。
[0035]
并且,根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,在采用攻角固定式螺旋桨时,通过增加离合器装置,在进行垂直起降时切断从引擎向第2螺旋桨的动力传递,从而可以减少动力损失;在进行过渡飞行时,可在过度飞行高度通过离合器装置向第2螺旋桨传递动力,且控制引擎控制装置来调整引擎功率;在进行巡航飞行时,通过离合器装置向第2螺旋桨传递动力,且使得用于垂直起飞及垂直降落的第1螺旋桨与航空器航行方向一致,从而可以有效地的分配并利用能量。
[0036]
另外,根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,当为了起降而进行垂直上升或垂直下降时,可以使用第1螺旋桨,且将从引擎、发电机及电力管理装置输出的电源同时用于第1螺旋桨的动作,以能够降低电池的容量,从而可以减轻电池重量,且航空器可减轻与电池重量相当的重量。
[0037]
并且,根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,通过避免倾转旋翼方式,从而,可以从根本上排除用于进行倾斜的机械结构,由此,可以减轻航空器重量,从而延长续航距离。同时,通过排除驱动源的倾斜过程,可以实现稳定的垂直起降及巡航飞行。具体地,现有倾转旋翼方式的航空器进行倾斜的机械原理相当复杂,且在倾斜过程中飞行控制难度高,因此,机体的飞行稳定性低下。与之相比,根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,通过螺旋桨的桨距控制等来缓慢提升推力,从而可以进行稳定的过渡飞行。
附图说明
[0038]
图1是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器中桨距控制螺旋桨的安装方式的图。
[0039]
图2是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器中离合器装置安装方式的图。
[0040]
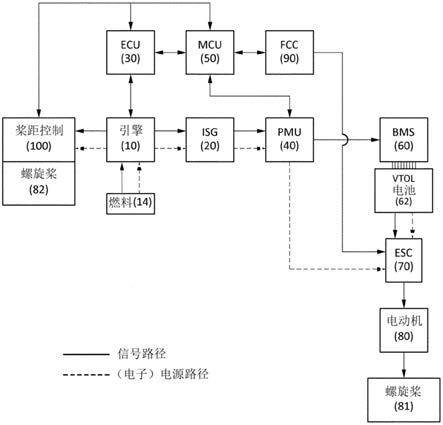
图3是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器的系统图的图。
[0041]
图4及图5是用于说明本发明实施的使用混合电力推进系统的垂直起降航空器示例的图。
[0042]
图6及图7是用于说明本发明实施例的使用混合电力推进系统的垂直起降航空器的另一示例的图。
[0043]
图8及图9是用于说明本发明实施例的使用混合电力推进系统的垂直起降航空器的又一示例的图。
具体实施方式
[0044]
参考附图和详细描述的实施例,本发明的优点及特点以及实现其的方法将会明确。
[0045]
以下将参考附图对本发明的实施例进行详细说明。应该理解,以下所描述的实施例是为了帮助理解本发明,本发明可以以与在此说明的实施例不同的方式进行各种变形并实施。但是,在对本发明进行说明时,经判断如果对相关的公知功能或构成要素的详细说明可能会对本发明的要点造成不必要的混淆,则省略相关的详细说明及具体的图示。另外,为了帮助理解本发明,附图可以不按照实际比例尺进行图示,而是将部分构成要素的尺寸放大后进行图示。
[0046]
另外,第1、第2等术语虽然可以用来对各种构成要素进行说明,但上述构成要素不能限定于上述术语。上述术语仅作为将某个构成要素与其他构成要素进行区分的目的来使用。例如,在不超出本发明的权利范围的情况下,可将第1构成要素命名为第2构成要素,类似地,也可将第2构成要素命名为第1构成要素。
[0047]
此外,下述术语是考虑本发明的功能而设定的术语,其根据生产者的意向或惯例,可能会有所差异,因此,需以本说明书的全部内容为基础对其进行定义。
[0048]
说明书全文中同一附图标记指同一构成要素。
[0049]
以下将参考图1至图5对根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法进行说明。图1是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器中桨距控制螺旋桨的安装方式的图。
[0050]
本发明实施例的使用混合电力推进系统的垂直起降航空器可以包括飞行体1、引擎10、发电机20、电力管理装置40、电池管理系统60、发动机80、第1、2螺旋桨81、82及控制部50。
[0051]
上述飞行体1如图4至图9所示,可以是机身2具有固定翼4的结构。
[0052]
上述引擎10可安装在上述飞行体1,具体地,可安装在上述固定翼4,可通过燃烧燃料来产生动力。
[0053]
上述发电机20(integrated starter generator,isg)可与上述引擎10连接,可通过引擎功率进行动作并生产电力。
[0054]
上述发电机20可兼起动器(starter)的功能,从而,当启动引擎10时,可以向发电机20提供电源以启动引擎10。
[0055]
上述电力管理装置40(power management unit,pmu)可管理上述电力,更具体地,可对生产的电力、剩余电力、电池充电电力等进行管理。
[0056]
上述电池管理系统60可包括第1电池62,上述电力管理装置40提供的电力可充入上述第1电池62。
[0057]
上述发动机80可安装在上述固定翼4或机身2,可接收上述电池管理系统60提供的电源而动作。
[0058]
上述第1螺旋桨81可通过上述发动机80进行动作。另外,上述第1螺旋桨81可以以垂直方向进行安装,且可以根据飞行体1的飞行目的,以适当的倾斜度倾斜地安装。
[0059]
上述第2螺旋桨82可通过上述引擎10进行动作。
[0060]
另外,如图1所示,第2螺旋桨82可具有桨距控制装置100,桨距控制装置100可调整第2螺旋桨82的攻角(angle of attack)。
[0061]
此外,如图2所示,引擎10和第2螺旋桨82之间可安装离合器装置102,离合器装置102可以切断或连接从引擎10传递至第2螺旋桨82的动力。
[0062]
上述控制部50可控制上述引擎10、上述发电机20、上述发动机80及上述第2螺旋桨82的动作。
[0063]
上述控制部50可由引擎控制装置30、电力管理装置40、主控单元(master control unit)、航空控制系统90、飞行控制装置(flight control computer,fcc)来实现。
[0064]
上述引擎控制装置30可控制引擎10的转数,具体而言,可控制节流伺服器12开闭来控制引擎10的引擎功率。
[0065]
上述主控单元可总的控制飞行体1,航空控制系统90及飞行控制装置等可控制飞行体1的航行。例如,可用于控制飞行体1的速度、压力、通信以及飞行体的姿势等。
[0066]
当飞行体1进行垂直起降时,上述控制部50可控制上述发电机20、上述电力管理装置40及上述电池管理系统60同时向上述发动机80提供电源。
[0067]
对于构成为如上的,根据本发明实施例的使用混合电力推进系统的垂直起降航空器而言,当飞行体1为了起降而进行垂直上升或垂直下降时,可使用第1螺旋桨81,第1螺旋桨81动作时可同时使用从引擎10、发电机20及电力管理装置40输出的电源,从而可减轻电池的容量。
[0068]
据此,根据本发明实施例的使用混合电力推进系统的垂直起降航空器,可减轻电池重量,且航空器可减轻与电池重量相当的重量。
[0069]
附图标记说明:
[0070]
1:飞行体 2:机身
[0071]
4:固定翼 10:引擎
[0072]
12:节流伺服器 14:燃料系统
[0073]
20:发电机 22:传感器
[0074]
30:引擎控制装置 40:电力管理装置
[0075]
50:主控装置 60:电池管理系统
[0076]
62、94:第1、第2电池 70:电子速度控制装置
[0077]
72:电源线 74:负荷检测线
[0078]
80:发动机 81、82:第1、第2螺旋桨
[0079]
90:航空控制系统 92:控制致动器
[0080]
94:第2电池 100:桨距控制装置
[0081]
102:离合器装置。
[0082]
优选地具体实施方式
[0083]
以下将参考图1针对控制部50的电子控制示例进行说明。
[0084]
根据本发明实施例的使用混合电力推进系统的垂直起降航空器,在垂直起降时使用第1螺旋桨81。首先,引擎10根据引擎控制装置30的控制,从燃料系统14接收燃料并输出动力。
[0085]
发电机20可由控制部50控制,并可通过上述动力进行动作以生产电力。
[0086]
发电机20所生产的电力可由电力管理装置40进行管理,例如,可向需要电力的部件进行配电,且监测是否生产有过剩电力,当生产有过剩电力时,则可通过引擎控制装置30来控制降低引擎10功率。
[0087]
电力管理装置40可以向电池管理系统60提供电力,电池管理系统60可以利用部分电力为第1电池62充电,并将另一部分电力提供给发动机80。
[0088]
另外,根据本发明实施例的使用混合电力推进系统的垂直起降航空器,可安装有多个发动机80,且每个发动机80可配备电子速度控制装置70。
[0089]
上述各个电子速度控制装置70可从上述电池管理系统60接收电力,上述各个电子速度控制装置70可以根据控制部50或上述航空控制系统90的指令单独控制各个发动机80的速度,从而使飞行体1的姿势稳定化。
[0090]
另外,即使第2螺旋桨82与引擎10连接并动作,桨距控制装置100通过调整第2螺旋桨82的攻角,使得第2螺旋桨的桨叶与航空器的航行方向保持平行,即,使攻角接近90度,从而,即使第2螺旋桨82进行动作也可减少引擎10所产生的动力的损失。
[0091]
并且,即使第2螺旋桨82与引擎10连接并动作,桨距控制装置100通过调整第2螺旋桨82的攻角,使得第2螺旋桨的桨叶与航空器的航行方向保持垂直,即,使攻角接近0度,从而,即使第2螺旋桨82进行动作也可减少引擎10所产生的动力的损失。
[0092]
上述控制部50通过控制上述桨距控制装置100,当飞行体1进行垂直起降时,对上述第2螺旋桨82的推力进行降低控制,使得上述第2螺旋桨82的推力完全不影响飞行体1飞行。更具体地,第2螺旋桨82的攻角可被控制为接近0度,由此,第2螺旋桨82的推力将变为“0”值,从而可完全不影响飞行体1的飞行。之后,可将第2螺旋桨82的攻角调整为正值,从而获得渐进式推力。由于第2螺旋桨82的攻角接近于“0”,因此,即使用引擎的最大功率旋转第2螺旋桨,也不会产生推力,可以将引擎所产生的最大限度的动力用于生产电力。另外,对于飞行稳定性及获得渐进式推力而言,相比将第2螺旋桨82的攻角从90度左右降低值的方法,优选使用将第2螺旋桨82的攻角从0度左右调整为正值的方法。
[0093]
另外,根据本发明实施例的使用混合电力推进系统的垂直起降航空器在进行过渡飞行或巡航飞行时,可使用第2螺旋桨82。
[0094]
根据本发明实施例的使用混合电力推进系统的垂直起降航空器在进行过渡飞行时,在过渡飞行高度下可通过调整第2螺旋桨82的攻角来调整所期望的推力。
[0095]
同样,根据本发明实施例的使用混合电力推进系统的垂直起降航空器在进行巡航飞行时,可通过调整第2螺旋桨82的攻角来产生所需的推力。
[0096]
更具体地,在进行垂直起降和巡航飞行之间的过渡飞行时,根据本发明实施例的使用混合电力推进系统的垂直起降航空器,可以将第2螺旋桨82的攻角从接近80~90度的状态或接近0度的状态,慢慢调整为25度左右,使其逐渐获得推力。由此,根据本发明的航空器可以缓慢且安全地从过渡飞行进入巡航飞行,从而可以大幅度地减少现有倾转旋翼式航空器在过渡飞行过程中存在飞行稳定性低下的问题。进而,如上所示,当通过桨距控制来调整推力时,可以避免在通过离合器控制引擎和第2螺旋桨之间的动力连接时,为了调整第2螺旋桨的旋转速度而过度地使用离合器而导致的离合器磨损等。
[0097]
进而,根据本发明实施例的使用混合电力推进系统的垂直起降航空器,可以将第2螺旋桨82的攻角调整为负值,以获得相反方向的推力(thrust reversal)。由此,根据本发明实施例的使用混合电力推进系统的垂直起降航空器在进行垂直起降时,主动抵抗从航空器的后方吹向前方的顺风(tail wind),从而可以进行稳定的垂直起降。
[0098]
进而,根据本发明实施例的使用混合电力推进系统的垂直起降航空器可对多个第2螺旋桨82分别进行桨距控制。由此,在垂直起飞并盘旋(hovering)状态下,通过将各个第2螺旋桨的桨距值调整为不同,以能够在空中进行静止旋转并改变飞行方向。
[0099]
如上所示,根据本发明实施例的使用混合电力推进系统的垂直起降航空器,可主动将各个第2螺旋桨82的攻角从0度调整为负值或正值,从而可以稳定地进行垂直起飞及降落,且在垂直起飞到过渡飞行的过程和过渡飞行到垂直降落的过程中提高飞行稳定性。由此,可防止引发航空器内部乘客等的晕机等。上述效果仅为示例性的,很显然本发明的效果不限定于此。
[0100]
进而,根据本发明的垂直起降航空器的固定翼4的规定位置可具有风向传感器或风量传感器(未图示)。优选地,固定翼4的尾端,即端部具有风向传感器或风量传感器,从而可以以航空器为基准,感测从哪一侧吹来何种强度的风,据此,在进行垂直起飞或降落时,可主动调整各个第2螺旋桨82的攻角,以稳定地进行垂直起降。
[0101]
假设飞行体1飞行时的升阻比为10,巡航所需的推力可以是垂直上升或垂直下降时的十分之一程度,当加速或倾斜飞行(dash flight)时可以是大约五分之一程度。
[0102]
即,飞行体1进行垂直上升或垂直下降时需要大量的能量,但过渡飞行或巡航飞行时,能量消耗可能会相对较低,因此,可能将产生剩余能量。剩余能量可以是电能,且这些剩余电力可以充入第1电池62。
[0103]
当飞行体1进行巡航飞行或过渡飞行时,上述控制部50可以控制增加上述第2螺旋桨82的推力,且控制上述发电机20生产的富余电力充入上述电池管理系统60的第1电池62。通过第1电池62被充电,可进一步增加飞行体1的滞空时间。
[0104]
此外,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器而言,当进行过渡飞行时可均使用第1螺旋桨81和第2螺旋桨82,可由控制部50根据飞行体1的飞行模式,控制提供给第1螺旋桨81的电能和提供给第2螺旋桨82的机械能的比例。
[0105]
并且,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器而言,
当采用攻角固定式螺旋桨时,可添加离合器装置102,将参照图2对此进行说明。图2是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器中离合器装置安装方式的图。
[0106]
当飞行体1进行垂直起降时,上述控制部50可以控制切断上述引擎10和上述第2螺旋桨82的动力连接。
[0107]
对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器而言,当飞行体1进行垂直起降时,启动离合器装置102来切断从引擎10到第2螺旋桨82的动力传递,从而减少动力损失。上述控制部50可控制上述离合器装置102的动作。
[0108]
并且,引擎10产生的机械能可全部提供给发电机20来增加电力生产,由此,可大容量且稳定的为发动机80提供电源。进而,通过发动机80的稳定动作,第1螺旋桨81将良好的进行动作,使得飞行体1的垂直上升或垂直下降可以更为顺畅的实现。
[0109]
另外,每个发动机80都可具有电子速度控制装置70。
[0110]
上述各个电子速度控制装置70可从上述电池管理系统60接收电力,上述各电子速度控制装置70可根据控制部50或上述航空控制系统90的指令单独控制各个发动机80的速度,从而使飞行体1的姿势稳定化。
[0111]
另外,当进行过渡飞行时,可以在过渡飞行高度启动离合器装置102来连接引擎10和第2螺旋桨82,从而使第2螺旋桨82增加推力。引擎10可以通过控制引擎控制装置30来调整引擎功率,巡航飞行时可以利用离合器装置102将引擎10的动力传递至第2螺旋桨82。
[0112]
另外,对于根据本发明实施例的使用混合电力推进系统的垂直起降航空器而言,当进行巡航飞行时,第1螺旋桨81可以倾斜为与航空器的航行方向一致,从而,可以有效地分配及利用能量。
[0113]
图3是用于说明根据本发明实施例的使用混合电力推进系统的垂直起降航空器的系统图的图。对于说明内容与前述技术说明重复的部分,将省略其说明。
[0114]
引擎10可以具有桨距控制装置100或离合器装置102。
[0115]
通过上述桨距控制装置100可调整第2螺旋桨82的攻角(angle of attack),且上述离合器装置102可切断或连接从引擎10传递至第2螺旋桨82的动力。当然,可以同时具有离合器装置102及桨距控制装置100(未图示)。
[0116]
发电机20还可以具有传感器22,传感器22可与电力管理装置40连接。传感器22可监测发电机20,且以检测出的第1检测值为基础,控制部50可以判断当前的电力生产是否适当。
[0117]
当电力生产不足时,控制部50可以控制,通过引擎控制装置30开启节流伺服器12,以增加引擎转数。
[0118]
相反,当电力生产过剩时,控制部50可以控制,通过引擎控制装置30关闭节流伺服器12,以降低引擎转数。
[0119]
根据本发明实施例的使用混合电力推进系统的垂直起降航空器可安装有多个发动机80,且每个发动机80可具有电子速度控制装置70。各个电子速度控制装置70可以根据控制部50的指令单独控制各个发动机80的速度,从而可以使飞行体1的姿势稳定化。
[0120]
并且,电池管理系统60的第1电池62可向各个电子速度控制装置70提供电源。另外,各个电子速度控制装置70可通过电源线72与第2电池94电源线连接并接收电源。
[0121]
上述第2电池94可以为驱动控制致动器92提供电源。上述控制致动器92可接收航空控制系统90的指令来进行动作。控制致动器92可启动飞行体1的飞行所需的各种装置,例如,可启动可动翼或尾翼。上述第2电池94,可由电力管理装置40对其进行充电。
[0122]
另外,对于上述电源线72而言,根据上述各个电子速度控制装置70消耗电源的程度,其负荷可能会变化。上述电源线72可连接负荷检测线74,对于负荷检测线74而言,在上述电源线72形成的负荷值可以检测为第2检测值,从而提供给上述电力管理装置40或控制部50。
[0123]
当上述第2检测值增加时,可判定为电力消耗增加,从而,控制部50可控制增加引擎10的引擎功率。相反,当上述第2检测值减少时,可判定为电力消耗减少,从而控制降低引擎10的引擎功率。
[0124]
即,根据本发明实施例的使用混合电力推进系统的垂直起降航空器通过实时检测启动第1螺旋桨81所消耗的电力来控制引擎10的引擎功率,从而可以生产最佳的电力。
[0125]
以下,将参照图4至图9对根据本发明实施例的使用混合电力推进系统的垂直起降航空器的多种实施例进行说明。
[0126]
图4及图5是用于说明本发明实施的使用混合电力推进系统的垂直起降航空器示例的图。图4是飞行体1的平面图,图5是飞行体1的侧面图。
[0127]
如图4及图5所示,机身2的前部两侧具有固定翼4,且在两侧固定翼4的前部和后部,以大致垂直的方向安装有发动机80,每个发动机80可具有第1螺旋桨81。在两侧固定翼4,以水平方向安装有引擎10,各个引擎10可具有第2螺旋桨82。
[0128]
图6及图7是用于说明本发明实施例的使用混合电力推进系统的垂直起降航空器的另一示例的图。图6是飞行体1的平面图,图7是飞行体1的侧面图。
[0129]
如图6及图7所示,机身2的两侧具有固定翼4,且在两侧固定翼4的前部和后部,以大致垂直的方向安装有发动机80,每个发动机80可具有第1螺旋桨81。在两侧固定翼4,以水平方向安装有引擎10,各个引擎10可具有第2螺旋桨82。并且,飞行体1的后部还可以具有引擎10和第2螺旋桨82。
[0130]
图8及图9是用于说明本发明实施例的使用混合电力推进系统的垂直起降航空器的又一示例的图。图8是飞行体1的平面图,图9是飞行体1的侧面图。
[0131]
如图8及图9所示,机身2的后部两侧安装固定翼4,且在两侧固定翼4的前部和后部,以大致垂直的方向安装有发动机80,每个发动机80可具有第1螺旋桨81。在两侧固定翼4,以水平方向安装有引擎10,各个引擎10可具有第2螺旋桨82。
[0132]
根据本发明实施例的使用混合电力推进系统的垂直起降航空器,如参照图4至图9所描述,即使飞行体1的结构多样,也可以适用。
[0133]
以上虽然参照附图对本发明的实施例进行了说明,但本发明所属技术领域的相应行业技术人员可以理解,本发明在不改变其技术思想或必要特征的情况下,可以实现为其他具体形式。
[0134]
因此,应该理解,上述实施例在所有方面都是示例性的,而非限定性。本发明的范围由权利要求书所表示,且应该解释为由权利要求书的含义、范围及其等效概念导出的所有变更或变形的形式均属于本发明的范围。
[0135]
工业实用性
[0136]
根据本发明实施例的使用混合电力推进系统的垂直起降航空器及其控制方法,可用于控制飞行体进行垂直起降飞行、过渡飞行及巡航飞行等飞行。
[0137]
因此,本发明可以用于提供一种使用混合电力推进系统的垂直起降航空器及其控制方法,其通过解决垂直起降和巡航飞行之间的较大推力之差,从而能够有效利用可用能量。
[0138]
并且,本发明通过避免倾转旋翼方式,从而,可以从根本上排除用于进行倾斜的机械结构。由此可以减轻航空器重量,从而延长续航距离。并且,通过排除驱动源的倾斜过程,可用于实现稳定的垂直起降及巡航飞行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1