模块式飞行器系统和选择性提供不同配置的飞行器的方法与流程
1.本发明涉及一种用于选择性地提供不同配置的飞行器的模块式飞行器系统,其中该模块式飞行器系统具有多个模块,从中能够选出不同的子集来提供该飞行器的不同配置。
背景技术:
2.提供不同的运输工具来运输货物和乘客。在此,不同的运输工具各自适配于陆上运输、水上运输或空中运输,从而使得在这些运输途径中的多种运输途径组合时,必须将货物或乘客从一种运输工具转载到另一种运输工具上。在运输货物时,可以通过以下方式来简化这种转载:货物被安置在具有一种或多种标准大小的集装箱中,这些集装箱可以容易地各自借助与这些集装箱适配的转载装置或者装载和卸载装置进行操作。此外,不同的运输工具也可以针对不同的货物量或乘客量以及不同的航程而适配,并且可以有利的是,即使在不变换运输路径的情况下也可以在不同的运输工具之间转载货物和乘客,例如将货物从一辆大的载重车转载到多辆较小的载重车上。例如,可以首先用大的载重车将货物运到被指配给某一地区(在该地区有多名货物收件人)的分配中心,并且在分配中心将所述货物装载到多辆较小的载重车上,其中每辆载重车驶向收件人的子集。
3.可以有利的是,货物或乘客的运输局限于空中运输,以避免不同的运输路径之间变换。然而同样在此情况下可能需要在不同的飞行器之间变换,以便可以高效地执行货物或乘客的运输。
技术实现要素:
4.本发明的目的在于,提供工具,以便能够以高效并且成本有效的方式执行货物和/或乘客的空中运输,并且尤其可以以高效并且成本有效的方式实现变换用于运输的飞行器。
5.这个目的通过根据权利要求1所述的模块式飞行器系统、和根据权利要求12所述的用于在使用模块式飞行器系统的情况下配置飞行器的方法来实现。所述模块式飞行器系统和所述方法的有利实施方式是相应的从属权利要求的主题。
6.根据本发明,提出一种模块式飞行器系统,所述模块式飞行器系统适配于选择性地提供不同配置的飞行器。换言之,借助于模块式飞行器系统可以实现,以不同的方式来配置飞行器并且选择性并且灵活地改变飞行器的配置,以便专门地适配于特定的使用目的。为了这一目的,所述模块式飞行器系统具有多个模块,从中可以选出不同的子集来提供飞行器的不同配置。当期望特定的配置时,相应地选出模块的适合的子集并且将其组装成飞行器。在变换配置时,将所有模块彼此分离并且随后将这些模块的新的子集组装成新的配置,或者仅从飞行器上移除一些模块并且由其他的模块代替,以获得新的配置。
7.所述多个模块具有带有一个或多个机身模块的机身模块组。在多个机身模块的情况下,其中所有或至少一些机身模块彼此不同并且尤其具有不同的大小。所述机身模块组
的各个机身模块具有预先限定的接口,所述接口用于选择性地将相应的机身模块与所述多个模块中不属于机身模块组的模块中的所有模块或其子集连接。所述模块也可以再次从相应的机身模块分离并且由其他的模块代替,所述其他模块随后经由相应的接口与机身模块连接。为了提供期望配置的飞行器,因此可以以简单的方式选出所述机身模块组的机身模块之一和所述多个模块中不属于机身模块组的模块的适合的子集并且将后者与所选出的机身模块连接,并且在变换配置时,可以将不属于机身模块组的模块再次从机身模块移除。
8.所述多个模块还具有多个能量供应模块,其中每个能量供应模块具有能量储存器,所述能量储存器适配于储存预先确定的、被指配给相应的能量供应模块的载能体并且针对相应的载能体具有预先确定的最大储存容量。所述载能体例如可以是煤油、电和/或氢气,其中所述能量储存器于是可以是煤油罐、电池或蓄电池或氢气罐。所述多个能量供应模块针对一种或多种载能体各自具有至少两个不同的能量供应模块,其能量储存器针对相应的载能体具有不同的最大储存容量。因此,例如针对煤油,可以存在具有较小的煤油罐作为能量储存器的一个或多个能量供应模块,并且可以存在具有较大的煤油罐作为能量储存器的一个或多个能量供应模块。同样的情况适用于氢气的情况,其中所述能量储存器于是相应地为氢气罐。以类似的方式,例如针对电能,可以存在具有较小的电池作为能量储存器的一个或多个能量供应模块,并且可以存在具有一个较大的电池或多个较小的电池作为能量储存器的一个或多个能量供应模块。所述能量供应模块中的每一个可以选择性地与所述机身模块组的机身模块中的多个或优选所有机身模块连接。在任何情况下可以以简单的方式实现,提供针对载能体具有不同的最大储存容量以及由此具有不同航程的不同配置的飞行器。
9.此外,所述多个模块具有多个驱动模块组,其中每个驱动模块组具有至少一个驱动模块,所述驱动模块适配于在飞行期间驱动所述飞行器。为了提供特定的配置,选出所述驱动模块组之一并且将属于这个驱动模块组的驱动模块或属于这个驱动模块组的驱动模块中的每个驱动模块与相应的机身模块连接。在所述驱动模块组中的每一个中,所有包含在相应驱动模块组中的驱动模块都基于同一经预先确定的驱动技术。所述多个驱动模块组包括至少两个不同的驱动模块组,其驱动模块基于不同的驱动技术。驱动技术例如尤其可以是喷气动力装置(例如喷嘴式动力装置、涡轮螺旋桨动力装置)、螺旋桨或旋翼。所述驱动模块组中的每个驱动模块组的驱动模块可以选择性地与机身模块组的机身模块中的多个或所有机身模块连接。在将所选出的一个驱动模块组和所选出的一个能量供应模块经由预先限定的接口与所选出的机身模块连接时,优选自动地,在能量供应模块与驱动模块组的驱动模块之间产生连接,使得在飞行器运行时,为所述驱动模块供应在能量供应模块中储存的载能体。以此方式可以简单并且快速地实现:选择性地以不同配置来提供飞行器,这些配置例如具有不同的航程、不同的最大飞行速度、不同的噪音排放和/或不同需要的最小起飞和/或着陆跑道长度。
10.所描述的模块式飞行器系统具有以下优点,可以非常简单、高效并且快速地以特别好地适用于相应使用目的的配置来提供飞行器。因此例如可以实现,对长途运输了大量货物的飞行器在目的地这样重新配置,使其适配于将仅一部分货物经过短的距离继续运输到人口稠密的市区,在那仅可以实现大体上垂直的起飞和着陆。此外,通过模块式的结构可以实现,在原本的飞行运行之外执行维护工作,其方式为更换模块并且执行模块上的维护
或维修工作,所述模块实际上不构成所配置的或经配置的飞行器的一部分。以此方式可以极大降低停机时间。此外,通过模块化以有利的方式简化了自动化,尤其通过机器人的使用。这既涉及对飞行器的配置或重新配置,也涉及对飞行器的装载和卸载。通过模块化,可以以有利的方式以一种或多种标准尺寸或标准接口来提供单独的模块,这可以以有利的方式实现简单的标准机器人的使用。
11.机身模块或分离的、可以选择性地与机身模块连接的控制模块可以具有控制装置,所述控制装置适配于可以实现所配置的飞行器的自主飞行。替代性地也可以实现,这样设计机身模块,使其适配于由飞行员来控制。
12.在优选的实施方式中,所述多个能量供应模块针对两种或更多种不同载能体中的各载能体各自具有两个或多个不同的能量供应模块,其能量储存器针对相应的载能体具有不同的最大储存容量。因此,例如针对煤油,可以存在具有较小的煤油罐作为能量储存器的一个或多个能量供应模块,并且可以存在具有较大的煤油罐作为能量储存器的一个或多个能量供应模块;针对氢气,可以存在具有较小的氢气罐作为能量储存器的一个或多个能量供应模块,并且可以存在具有较大的氢气罐作为能量储存器的一个或多个能量供应模块;并且针对电能,可以存在具有较小的电池作为能量储存器的一个或多个能量供应模块,并且可以存在具有一个较大的电池或多个较小的电池作为能量储存器的一个或多个能量供应模块。所述能量供应模块中的每一个可以选择性地与所述机身模块组的机身模块中的多个或优选所有机身模块连接。在任何情况下,可以以简单的方式实现,提供具有不同载能体以及由此具有例如不同航程的不同配置的飞行器。
13.在优选的实施方式中,所述多个模块具有多个有效载荷模块,所述有效载荷模块各自适配于接收带有预先确定的最大容量的有效载荷。所述有效载荷模块中的每一个可以选择性地与机身模块组的机身模块中的一个或多个或所有机身模块连接。优选地,所有具有相同最大容量的有效载荷模块具有同一外部形状和尺寸,使得可以简化自动化和标准化的操作。可以实现,所述机身模块中的各个机身模块目前仅可以各自接收所述有效载荷模块中的一个,然而所述机身模块中的一些或所有机身模块可以同时各自接收多个有效载荷模块。
14.于是进一步优选的是:所述能量供应模块中的每个都适配于以以下方式选择性地与所述有效载荷模块中的至少一个进行连接,使得相应的能量供应模块和相应的有效载荷模块作为单元能够与相应的机身模块连接并且能够从所述机身模块移除。也可以实现,所述能量供应模块中的多个可以与一个有效载荷模块以上述方式连接成为一个单元。优选的是,所述能量供应模块中的各个能量供应模块可以与所述有效载荷模块中的各个有效载荷模块连接。在任何情况下,可以以此方式特别简单并且高效地在转载有效载荷的同时提供带有经填充的能量储存器和特别适用于相应使用目的的载能体的能量供应模块。
15.在带有多个有效载荷模块的实施方式中也优选的是,所述多个有效载荷模块具有至少两个最大容量不同的不同有效载荷模块。
16.此外,在带有多个有效载荷模块的实施方式中优选的是,所述多个有效载荷模块具有一个或多个用于接收货物的有效载荷模块和/或一个或多个用于接收人员的有效载荷模块。优选地,于是设有多个具有不同的最大容量的、用于接收货物的有效载荷模块或设有多个具有不同的最大容量的、用于接收人员的有效载荷模块。
17.在优选的实施方式中,所述机身模块组具有两个或多个大小不同的机身模块。于是,较大的机身模块例如可以适配于接收其中较大的有效载荷模块和/或能量供应模块或各自同时接收其中多个有效载荷模块和/或能量供应模块。
18.在优选的实施方式中,所述机身模块组的不同机身模块具有不同的着陆装置,和/或所述多个模块具有多个包括不同着陆装置的着陆装置模块。例如可以一方面设有着陆装置,所述着陆装置包括一个或多个用于在地上着陆的起落架,并且另一方面设有用于在水上着陆的着陆装置。
19.在优选的实施方式中,所述多个驱动模块组包括:至少一个第一驱动模块组,所述第一驱动模块组具有四个驱动模块,所述驱动模块各自具有旋翼并且所述驱动模块适配于提供四旋翼配置的飞行器;以及至少一个第二驱动模块组,所述第二驱动模块组具有至少两个驱动模块,所述驱动模块各自具有至少一个喷气动力装置(尤其喷嘴式动力装置或涡轮螺旋桨动力装置)并且所述驱动模块适配于提供远航程配置或长距离配置的飞行器。因此以简单的方式在四旋翼配置与远航程配置或长距离配置之间变换,所述四旋翼配置具有相对较短的航程并且适配于大体上垂直的起飞和着陆,使得可以实现尺寸较小的起飞和着陆地点,如尤其在城市中或在人口稠密的地区。
20.在优选的实施方式中,所述驱动模块组中的至少一个驱动模块组具有至少两个驱动模块,所述驱动模块各自包括机翼,其中所述两个驱动模块能够与所述机身模块之一相连接,其方式为将所述机翼与所述机身模块连接。于是在所述机翼中的每个机翼上各自紧固有一个或多个动力装置、螺旋桨或其他的驱动装置,它们与机翼共同构成相应的驱动模块。
21.在优选的实施方式中,所述多个模块具有多个升力模块。
22.根据上述实施方式之一所述的模块式飞行器系统可以以有利的方式在用于配置飞行器的方法中使用。为此,选出所述机身模块组中的一个机身模块、所述多个能量供应模块中的一个能量供应模块、和所述多个驱动模块组中的一个驱动模块组(以及如有必要另外的模块,例如一个或多个有效载荷模块和/或一个或多个升力模块),并且将所选出的能量供应模块、和所选出的驱动模块组的至少一个驱动模块(以及如有必要另外的所选出的模块)借助于预先限定的接口与所选出的机身模块连接。
23.在优选的实施方式中,首先在四旋翼配置和远航程配置之间进行选择,并且随后,在已选出所述四旋翼配置时,在选出所述多个驱动模块组中的一个驱动模块组的步骤中选出第一驱动模块组,所述第一驱动模块组具有四个驱动模块,所述驱动模块各自具有旋翼;并且在已选出所述远航程配置或长距离配置时,选出第二驱动模块组,所述第二驱动模块组具有至少两个驱动模块,所述驱动模块各自具有至少一个喷气动力装置(例如尤其喷嘴式动力装置或涡轮螺旋桨动力装置)。
24.下面将借助附图详细阐述本发明的实施例。
附图说明
25.图1示出根据本发明的模块式飞行器系统的示例性实施方式的示意性视图。
26.图2示意性地示出在使用图1的模块式飞行器系统的情况下借助于自动化的机器人系统组装飞行器。
27.图3示出飞行器的第一配置的示意性透视图,该飞行器已在使用图1的模块式飞行器系统和图2的机器人系统的情况下组装。
28.图4示出飞行器的第二配置的示意性透视图,该飞行器已在使用图1的模块式飞行器系统和图2的机器人系统的情况下组装。
29.图5示出具有有效载荷模块和与之连接的能量供应模块的单元的示意性视图。
30.图6示意性地示出借助于自动化的机器人系统对图5的飞行器进行装载和卸载。
具体实施方式
31.在图1中示意性地示出模块式飞行器系统1。模块式飞行器系统1具有:带有多个大小不同的机身模块2的机身模块组;多个单元3,这些单元各自具有有效载荷模块3b和与之连接的能量供应模块3a(参见图5,下文将详细描述);各自带有多个驱动模块4a或4b的两个不同的驱动模块组;带有一个垂直尾翼6a和多个升力模块7的尾部模块6。模块2、3a、3b、6和7中的各个模块以及这些驱动模块组可以是以比图1中示意性且示例性示出的更多或更少的方式提供的。此外,能量供应模块3a例如可以比有效载荷模块3b更多,或反之。驱动模块4b各自具有一个机翼5a和被紧固在机翼5a上的多个喷气动力装置5b。喷气动力装置5b可以优选为喷嘴式动力装置或涡轮螺旋桨动力装置。
32.借助于飞行器系统1,可以以简单的方式选择性地以不同的配置提供飞行器并且灵活地重新配置飞行器,以便从一种配置变换到另一种配置。为了提供期望配置的飞行器,选出机身模块2之一、单元3之一、驱动模块组4a、4b之一以及如有必要(根据配置)尾部模块6和/或升力模块7中的一个或多个升力模块,即所有模块或单元2、3、4a、4b、6和7的子集。随后,所选出的单元3、所选出的驱动模块组的驱动模块4a或4b(和如有必要所选出的尾部模块6和/或所选出的升力模块7)可松脱地与所选出的机身模块2连接。为此,机身模块2具有预先限定的接口,模块或单元可以借助于这些接口选择性地被紧固在相应的机身模块2上并且可以再次从机身模块松脱。
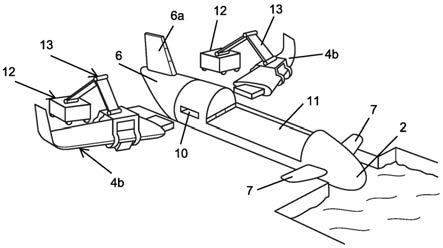
33.在图2中示意性地示出这些接口10、11中的两个,其中展示了借助于机器人12自动化地组装所选择的配置的飞行器。在图2中尤其示出,两个机器人12如何借助于机械臂13保持对应的驱动模块组的两个驱动模块4b并且与机身模块2上的两个接口10紧固。尾部模块6和两个升力模块7已经借助于对应的接口和对应的机器人被紧固在机身模块2上。此外可以看出,机身模块2具有用于接收模块式飞行器系统的单元3之一的接口11。在完成组装的状态下,飞行器因此具有在图4中示出的远航程配置或长距离配置。
34.替代性地,可以提供例如在图3中示出的四旋翼配置的飞行器,其方式为:代替两个驱动模块4b和两个升力模块7,将四个驱动模块4a与机身模块2连接并且省去尾部模块6。四旋翼配置特别适用于相对较短的距离和以下使用领域,其中视起飞和着陆地点的尽可能小的尺寸和能够大体上垂直地起飞和着陆的能力而定。相比之下,图3的远航程配置特别适用于长的距离和以下使用领域,其中起飞和着陆地点的尺寸以及尤其起飞和着陆跑道长度有次要意义。
35.图5示意性地示出图1的模块式飞行器系统1的单元3之一的单独的部件。如已实施的,单元3具有能量供应模块3a和有效载荷模块3b,它们可松脱地相互联接或可以相互连接。
36.能量供应模块3a具有载体部件20,该载体部件承载能量储存器21和控制装置22。能量储存器21和控制装置22与载体部件20可松脱地连接,使得它们可以选择性地单独或一起被更换。能量储存器21适配于储存特定的载能体,例如煤油、电能或氢气,并且具有针对这些载能体预先确定的最大储存容量。控制装置22被适配为用于控制能量供应模块3a的运行,包括例如能量管理功能、温度控制和消防安全监测。模块式飞行器系统1优选地具有不同的能量供应模块3a,这些能量供应模块在其针对不同载能体的能量储存器的适配方面并且在针对对应载能体的能量储存器的最大储存容量方面彼此不同。在此还优选的是,模块式飞行器系统1具有多个载体部件20、能量储存器21和控制装置22,可以从中选出,以组装期望的能量供应模块3a。
37.有效载荷模块3b具有可以可松脱地相互连接的载体部件30、有效载荷接收壳体31和有效载荷模块盖32,以得到有效载荷模块3b。有效载荷接收壳体31可以适配于接收货物和/或接收人员,并且在已组装状态下位于载体部件30与有效载荷模块盖32之间,该有效载荷模块盖被紧固在载体部件30上。模块式飞行器系统1优选地具有不同的有效载荷模块3b,这些有效载荷模块在对接收货物和人员的适配方面以及在其接收容量方面彼此不同。在此优选的是,每个这种配置的模块式飞行器系统1具有多个副本,以实现简单地更换相同的有效载荷模块3b。在此还优选的是,模块式飞行器系统1具有多个载体部件30、有效载荷接收壳体31和有效载荷模块盖32,可以从中选出,以组装期望的有效载荷模块3b。有效载荷模块3b优选地具有所有标准化的形状和尺寸,以便通过简单的机器人可以实现或简化其自动化的操作。
38.这个操作示意性地在图6中示出,其中展示了:两个机器人12如何以机械臂13将单元3从机身模块2的接口11移除并且将另外的单元3与机身模块2的接口11连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1