一种无人机保护装置、无人机装置及其驱动方法与流程
[0001]
本发明涉及一种保护无人机技术领域,具体涉及一种无人机保护装置、无人机装置及其驱动方法。
背景技术:
[0002]
近年来,科技不断发展,智能机器逐渐在各个领域发挥出其独特的作用。在一些拍摄场景和普通人难以实现的高空作业中,无人机的优势得到了大众的广泛重视并迅速被普及开来。在农业上,无人机通常被用来喷洒农药和农田信息监测,为农业生产者节省了不少开支;在巡查方面,无人机广泛应用于风力发驱动机构涡轮的定期检查,也在输电网巡查中作为“主力军”;在勘测地形、绘制城市地形图方面也拥有极大优势。在日常生活中,主人在疫情期间利用无人机实现“远程遛狗”;外卖员利用无人机送外卖上楼。
[0003]
四旋翼无人机属于多旋翼飞行器的一种,而多旋翼飞行器的发展历史十分悠久。1923年,e.oemichen 改进了早期的多旋翼直升机,并成功令其起飞了14分钟。六年后,法国 parrot 公司研发出四旋翼玩具,令其被更多人所知晓。没过多久,中国推出一款小精灵 phantom 一体机,该飞行器价格更加低廉,进一步促进了多旋翼的发展。
[0004]
四旋翼无人机虽然结构简单且价格低廉,但是其飞行过程中极难稳定,降落时也常常会发生侧翻。而且裸露在外的旋翼极易在飞行过程中受到外界干扰从而导致飞行失败,从而带来较大的损失。
技术实现要素:
[0005]
为了解决背景技术中存在的问题,本发明的目的在于提供一种无人机保护装置、无人机装置及其驱动方法,无人机保护装置可以用于四旋翼无人机,增强四旋翼装置的安全性和稳定性。
[0006]
为了实现上述目的,本发明采用如下技术方案:一种无人机保护装置包括保护叶、伸缩件和连接板,所述伸缩件一端连接所述保护叶,以带动所述保护叶伸缩移动;连接板设置于所述伸缩件的另一端与无人机旋翼之间;其中,所述伸缩件的另一端与所述连接板之间转动连接,使得所述保护叶可以转动至所述无人机旋翼的上方或所述机架的支撑脚的下方。
[0007]
本申请实施例还包括第二种技术方案,一种无人机装置,包括上述的无机人保护装置,以及控制器、旋翼、用于驱动旋翼转动的驱动机构、机架以及设置于机架下方的支撑脚;其中,所述无机人保护装置连接于所述旋翼上,并使得无机人保护装置的保护叶可以转动至所述无人机旋翼的上方或所述机架的支撑脚的下方。
[0008]
本申请实施例还包括第三种技术方案,一种无人驱动方法,用于驱动上述无人机装置,包括:无人机装置起飞时,控制器控制驱动机构驱动旋翼加速转动,无人机保护装置的保护叶位于旋翼上方;
无人机装置下降时,控制器控制驱动机构驱动旋翼减速转动,控制无人机降落,控制器控制舵机驱动伸缩件及保护叶翻转,控制器控制伸缩件伸长,并使得保护叶翻转于机架的支撑脚的下方。
[0009]
本发明的有益效果如下:无人机保护装置,用于增强四旋翼装置的安全性和稳定性。当四旋翼无人机在高空飞行时,保护叶可翻转在旋翼的上方,对高空中的不明飞行物体以及其他干扰因素起到阻挡和保护作用;当无人机降落时,伸缩件和保护叶可以翻转至无人机下方,伸缩件进行上下伸缩活动,在降落时起到一个缓冲的保护作用,同时四个保护叶大大增加了无人机装置与地面的接触面积与无人机底盘的重量,使得无人机降落时能够平稳着地。
[0010]
本发明的无人机保护装置,采取了翻转式结构的保护装置,使保护叶装置在降落时或者是高空工作时都能起到保护作用,大大提高了整个装置的灵活性,减少了不必要的结构,使得这个装置结构更加紧凑、简洁。
[0011]
本发明可用于多种类型的无人机装置上,对无人机装置起到较为全面的保护作用,且机构简单、灵活性强,较为实用。
附图说明
[0012]
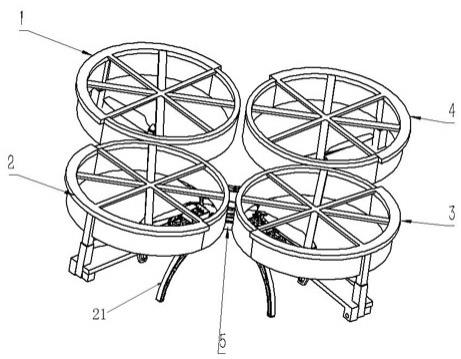
图1为本发明无人机装置高空工作时一实施例的状态结构示意图。
[0013]
图2为本发明无人机保护装置一实施例的结构示意图。
[0014]
图3为本发明无人机装置降落时一实施例的状态结构示意图。
[0015]
其中:1-保护装置一;2-保护装置二;3-保护装置三;4-保护装置四;5-四旋翼装置;6-连接板;7-舵机;8-伸缩件;9-保护叶;10-旋翼一;11-驱动机构一;12-gps系统;13-驱动机构二;14-旋翼二;15-驱动机构三;16-旋翼三;17-驱动机构四;18-旋翼四;19-电池;20-控制器;21-支撑脚;22-机架臂。
[0016]
具体体实施方式下面结合附图和实施例对本发明做进一步的详细说明。
[0017]
如图1和图3所示,本发明实施例提供一种无人机保护装置,包括保护叶9、伸缩件8和连接板6,所述伸缩件8一端连接所述保护叶9,以带动所述保护叶9伸缩移动;连接板6设置于所述伸缩件8的另一端与无人机旋翼10、14、16、18之间;其中,所述伸缩件8的另一端与所述连接板6之间转动连接,使得所述保护叶9可以转动至所述无人机旋翼10、14、16、18的上方或所述机架的支撑脚21的下方。
[0018]
本发明实施例的无人机为四旋翼无人机装置5,包括四个旋翼10、14、16、18,四个驱动机构11、15、13、17,机架及设置于机架下方的支撑脚;旋翼分别为旋翼一10、旋翼二14、旋翼三16、旋翼四18;驱动机构分别为驱动机构一11、驱动机构三15、驱动机构二13、驱动机构四17。具体地,机架包括四根支撑脚、机架平台以及四根机架臂,每根机架臂上通过螺丝安装了一个驱动机构11、15、13、17,驱动机构11、15、13、17的输出轴上固定安装一副旋翼10、14、16、18,旋翼10、14、16、18为两叶式结构,四个旋翼10、14、16、18均处于同一水平面。
[0019]
如图2所示,每个保护装置1、2、3、4包括连接板6、舵机7、伸缩件8以及保护叶9。所述连接板6用于连接四旋翼装置5和保护装置1,连接板6的下方固定安装一个舵机7,连接板6一端中部通过螺栓螺母固定伸缩件8的底端,伸缩件8的顶端固定保护装置1的保护叶9,保
护叶9为辐条式圆盘状结构,每个保护叶9的辐条共三条。
[0020]
本发明的无人机保护装置机动性高,适用多种无人机装置并起到保护作用;不局限与四旋翼无人机装置。本发明的无人机保护装置采取辐条式圆盘状保护叶,将整个旋翼10、14、16、18纳入保护叶1、2、3、4的保护范围之下,确保旋翼10、14、16、18工作时不被打扰,增加了无人机的安全性和使用寿命;同时,圆盘状的结构,受力面积和接触面积都比四旋翼装置的支撑脚大,在降落时更加稳定,避免侧翻。
[0021]
保护装置包括所述控制器20与所述舵机7连接,用于控制所述舵机7驱动伸缩件8相对于所述连接板6翻转,使得所述保护叶9位于所述无人机旋翼的上方或所述机架的支撑脚的下方。具体地,控制器20安装机架臂上。本发明实施例的无人机装置,还包括上述无人机保护装置,无人机采用四旋翼无人机装置5,本发明实施例的无人机装置还包括gps系统12,gps系统12用于控制无人机装置的飞行路线以及定位无人机装置的位置;所述控制器与gps系统12和驱动机构11、15、13、17连接,用于接收gps系统数据及无人机装置飞行的实时数据,控制驱动机构11、15、13、17驱动旋翼10、14、16、18转动。
[0022]
四个保护叶9大大增加了无人机装置与地面的接触面积与无人机底盘的重量,使得无人机降落时能够平稳着地。
[0023]
本发明实施例的控制器20以及gps系统12构成控制模块,通过装置中的控制模块实现无人机的飞行以及避障功能,控制模块还包括电池19,所述电池19作为整个装置的动力输出,固定安装在四旋翼机架平台的正上方;gps系统12用于控制四旋翼无人机的飞行路线以及定位四旋翼装置的位置,固定在一根机架臂上,控制器20安装在与之相邻的另一根机架臂上。
[0024]
如图3所示 ,控制器20与gps系统12、电池19以及所有舵机7、驱动机构11、15、13、17相连接,根据实时传输来的无人机飞行数据同时结合无人机gps系统12数据,记录无人机的飞行轨迹、地理位置以及相应的命令指示,做出下一步的指示判断同时将所有的飞行数据进行保存。
[0025]
本发明实施例中的伸缩件8可以是丝杆组件也可以滑杆组件,也可以是伸缩杆。本发明考虑到装置结构的简洁,采取了翻转式结构的保护装置,使保护叶1、2、3、4在降落时或者是高空工作时都能起到保护作用,大大提高了整个装置的灵活性,减少了不必要的结构,使得这个装置结构更加紧凑。
[0026]
本发明的具体实施例如下:无人机装置起飞时,如图1所示,控制器20控制驱动机构11、15、13、17,驱动机构11、15、13、17驱动旋翼10、14、16、18开始加速转动,四旋翼无人机装置的保护装置1、2、3、4位于四旋翼装置5的上方,保护装置1的保护叶9正好在旋翼10、14、16、18的正上方,保护旋翼10、14、16、18不被高空多种多样的不明飞行物伤害。
[0027]
当无人机装置开始降落时,控制器20控制各个驱动机构11、15、13、17改变工作状态,旋翼10、14、16、18的旋转速度缓慢降低,控制整个四旋翼无人机装置的缓慢降落,旋翼10、14、16、18减速转动;同时,控制器20控制舵机7工作,舵机7驱动伸缩件8及保护叶9在空中完成180度的翻转,使得整个保护叶9处于机架的支撑脚的正下方(如图3所示),翻转期间,控制器20控制驱动机构11,驱动机构11驱动伸缩件8伸长一定长度,令保护装置1能够顺利翻转至机架脚的正下方并距离机架脚有一定高度,上述动作均在空中实现。
[0028]
当无人机着陆时,保护装置1的保护叶9位于整个四旋翼装置5的最下方,并且最早接触到地面。在预备接触地面以及刚接触到地面的这一时间段内,控制器20控制驱动机构11,由驱动机构11控制伸缩件8进行回缩运动,在降落时起到一定的缓冲作用,对整个四旋翼无人机装置起到保护作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1