一种用于茄子人工授粉的农用无人机的制作方法
[0001]
本发明属于农用无人机技术领域,尤其是涉及一种用于茄子人工授粉的农用无人机。
背景技术:
[0002]
无人机即无人驾驶飞机的简称,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,其由于具有体积小、造价低、使用方便的特点广泛用于各个领域,其中就包括农业领域。
[0003]
传统的对茄子授粉主要是通过引进蜜蜂授粉和人工辅助授粉两种方式,这两种方式均存在局限性,工作效率较低,劳动强度大,耗时长,且易出现授粉不均匀的问题,影响农作物的生长和产量,降低经济收益。
[0004]
为此,我们提出一种用于茄子人工授粉的农用无人机来解决上述问题。
技术实现要素:
[0005]
本发明的目的是针对上述授粉效率低的问题,提供一种高效且授粉效果好的用于茄子人工授粉的农用无人机。
[0006]
为达到上述目的,本发明采用了下列技术方案:一种用于茄子人工授粉的农用无人机,包括机体,所述机体的侧壁上周向等距排布有四个机翼,四个所述机翼上均安装有螺旋桨,所述机体的下端可拆卸安装有花粉箱,所述花粉箱两侧的侧壁上均固定连通有多根授粉管道,所述花粉箱两侧的内侧壁上分别通过复位弹簧固定连接有密封板,所述密封板的侧壁上安装有与授粉管道匹配的密封塞,所述机体的下方设有水平设置的翼板,所述翼板的上表面呈向上拱起的弧线形设置,下表面为水平面,所述翼板的上表面固定连接有螺杆,所述螺杆的上端贯穿花粉箱的底面并与花粉箱滑动连接,所述螺杆通过传动机构与密封板连接。
[0007]
优选的,所述传动机构包括与花粉箱内底面转动连接有螺纹筒,所述螺杆的上端延伸至螺纹筒内并与螺纹筒螺纹配合,所述螺纹筒外固定套接有卷收轮,所述卷收轮外绕设有两根缆绳,两根所述缆绳的另一端分别与两块密封板固定。
[0008]
优选的,所述螺纹筒的侧壁上固定安装有多根搅拌杆。
[0009]
优选的,所述机体外套设有防护环,所述防护环通过多根连接杆与机体的侧壁固定连接,所述防护环位于授粉管道出口端的正上方。
[0010]
与现有的技术相比,本用于茄子人工授粉的农用无人机的优点在于:
[0011]
1、本发明通过设置授粉管道,无人机工作时,螺旋桨转动产生向下的气流,气流在授粉管道出口端快速流动,根据伯努利原理,可将花粉由花粉箱内抽吸出,并被气流吹向下方农田中,完成授粉,工作效率高。
[0012]
2、本发明通过设置翼板,无人机在农田上行驶过程中,水平气流吹向翼板,带动翼板向上移动,则螺杆带动与之螺纹配合的螺纹筒转动,卷收轮对缆绳进行卷收,拉动两块密
封板向螺纹筒方向靠近,将授粉管道打开,此时花粉可随气流向下均匀喷洒,当无人机在农田上悬停时,翼板在重力作用下下落,密封板在复位弹簧的弹力作用下复位,并将授粉管道封堵,避免无人机在悬停过程中,仍向外喷洒花粉,造成浪费。
[0013]
3、本发明通过设置搅拌杆,搅拌杆可随螺纹筒往复转动,对花粉箱内的花粉进行搅拌、打散,避免花粉结块,有利于均匀授粉。
[0014]
4、本发明通过设置防护环,防止螺旋桨直接与茄子较高处的枝叶发生碰损坏撞或农作物被破坏的问题发生,同时螺旋桨产生的气流吹向防护环,根据卡门涡街效应可知,在一定条件下的定常来流绕过某些物体时,物体两侧会周期性地脱落出旋转方向相反、排列规则的双列线涡,则防护环正下方的气流呈旋涡状流动,延长花粉在空气中飘散的时间和距离,提高授粉的成功率,降低成本。
附图说明
[0015]
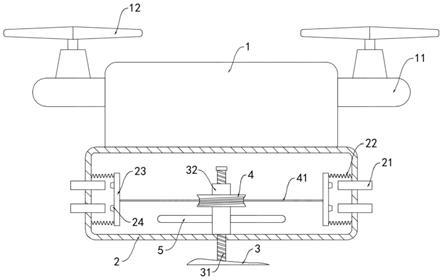
图1是本发明提供的一种用于茄子人工授粉的农用无人机实施例1的结构示意图;
[0016]
图2是本发明提供的一种用于茄子人工授粉的农用无人机实施例2的结构示意图;
[0017]
图3是本发明提供的一种用于茄子人工授粉的农用无人机实施例2中气流流动方向的示意图。
[0018]
图中,1机体;11机翼;12螺旋桨;2花粉箱;21授粉管道;22复位弹簧;23密封板;24密封塞;3翼板;31螺杆;32螺纹筒;4卷收轮;41缆绳;5搅拌杆;6防护环。
具体实施方式
[0019]
以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
[0020]
实施例1
[0021]
如图1所示,一种用于茄子人工授粉的农用无人机,包括机体1,机体1的侧壁上周向等距排布有四个机翼11,四个机翼11上均安装有螺旋桨12,机体1的下端可拆卸安装有花粉箱2,花粉箱2两侧的侧壁上均固定连通有多根授粉管道21,花粉箱2两侧的内侧壁上分别通过复位弹簧22固定连接有密封板23,密封板23的侧壁上安装有与授粉管道21匹配的密封塞24。
[0022]
机体1的下方设有水平设置的翼板3,翼板3的上表面呈向上拱起的弧线形设置,下表面为水平面,翼板3的上表面固定连接有螺杆31,螺杆31的上端贯穿花粉箱2的底面并与花粉箱2滑动连接,螺杆31通过传动机构与密封板23连接,需要说明的是,传动机构包括与花粉箱2内底面转动连接有螺纹筒32,螺杆31的上端延伸至螺纹筒32内并与螺纹筒32螺纹配合,螺纹筒32的侧壁上固定安装有多根搅拌杆5,螺纹筒32外固定套接有卷收轮4,卷收轮4外绕设有两根缆绳41,两根缆绳41的另一端分别与两块密封板23固定。
[0023]
本实施例的工作原理如下:无人机工作时,螺旋桨12转动产生向下的气流,气流在授粉管道21出口端快速流动,根据伯努利原理,可将花粉由花粉箱2内抽吸出,并被气流吹向下方农田中,完成授粉,工作效率高。
[0024]
无人机在农田上行驶过程中,水平气流吹向翼板3,带动翼板3向上移动,则螺杆31带动与之螺纹配合的螺纹筒32转动,卷收轮4对缆绳41进行卷收,拉动两块密封板23向螺纹筒32方向靠近,将授粉管道21打开,此时花粉可随气流向下均匀喷洒;当无人机在农田上悬
停时,翼板3在重力作用下下落,密封板23在复位弹簧22的弹力作用下复位,并将授粉管道21封堵,避免无人机在悬停过程中,仍向外喷洒花粉,造成浪费。
[0025]
搅拌杆5可随螺纹筒32往复转动,对花粉箱2内的花粉进行搅拌、打散,避免花粉结块,有利于均匀授粉。
[0026]
实施例2
[0027]
如图2-3所示,本实施例与实施例1的不同之处在于:机体1外套设有防护环6,防护环6通过多根连接杆1与机体1的侧壁固定连接,防护环6位于授粉管道21出口端的正上方。
[0028]
在本实施例中,防护环6可防止螺旋桨12直接与茄子较高处的枝叶发生碰损坏撞或农作物被破坏的问题发生,同时螺旋桨12产生的气流吹向防护环6,根据卡门涡街效应可知,在一定条件下的定常来流绕过某些物体时,物体两侧会周期性地脱落出旋转方向相反、排列规则的双列线涡,则防护环6正下方的气流呈旋涡状流动(气流流动方向如图3中箭头所示),延长花粉在空气中飘散的时间和距离,提高授粉的成功率,降低成本。
[0029]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1