一种星表极端地形绳系双轮移动机器人系统及方法与流程
[0001]
本发明属于移动机器人技术领域,具体指代一种小型轻量化星表极端地形绳系双轮移动机器人系统及方法。
背景技术:
[0002]
行星表面很多具有探索价值的区域往往处于陡峭斜坡、沟壑等类型的极端地形之中。现有大多机器人只能在小于30度斜坡、相对平坦的岩石地形上运行和作业,不适用于探索前述极端地形区域。陡峭斜坡会削弱巡视器的牵引力,极大的降低地形的可通过性;传统的摇臂转向架结构,在陡峭斜坡上的滑动会显著增加,并且根本无法进入某些区域;沟壑对巡视器来说也非常危险;在崎岖不平的地形上,一般的巡视移动机器人有可能跌落。
[0003]
为了克服上述极端地形区域所带来的限制,目前针对陡峭斜坡、沟壑等地形设计的巡视器一类为绳系移动机器人,通过一端固定在固定的母机器人或者锚点的系绳提供拉力或者支撑力,绳系移动机器人能够到达普通轮式机器人无法通过的陡峭斜坡、沟壑等区域进行定点探测,使得对这些极端地形区域进行探测成为可能。
[0004]
由于能够探索极端地形,除了行星表面探测,绳系移动机器人还可以应用到许多领域。能够自主远程探索高风险地形区域,例如接近火山的区域。此外绳系移动机器人不需要地形表面提供支撑下降,因此能够下降到坑洞中从而可以用于矿山事故中危险区域的搜索与营救任务。
[0005]
虽然现在已经提出了一些绳系移动机器人,但考虑到自身的能力、具体我国实际的火箭发射能力以及母子系统部署质量体积要求等实际情况,这些机器人仍存在很多不足之处。如dante ii四足行走型绳系机器人,重量比较大,四足容易和绳索缠绕和侧翻。cliffbot为应用于陡峭斜坡上的四轮绳系机器人,采用了两根系绳,虽然能够横向移动,但是两根系绳限制了机器人的机动性;采用在悬崖边缘的母机器人来进行系绳的收放操作,虽然减轻了cliffbot自身的重量,但却增加了系绳与路面的摩擦,增加了绳索被破坏的几率,更严重的是cliffbot容易侧翻,并且不能从侧翻中恢复。tressa也为四轮绳系机器人,但体积和重量都比较大。axel虽然是一个双轮绳系移动机器人,但重量仍然很重,重心较高;驱动形式导致无法直接对力矩和绳索拉力进行综合优化,导致移动时能耗仍然较高。
技术实现要素:
[0006]
针对于上述现有技术的不足,本发明的目的在于提供一种星表极端地形绳系双轮移动机器人系统及方法,以解决现有系统结构重量重、体积大、重心高,驱动系统无法很好实现力矩和绳索张力优化从而导致功耗高、无法快速响应滑动和跌落,容易发生意外等问题。
[0007]
为达到上述目的,本发明采用的技术方案如下:本发明的一种星表极端地形绳系双轮移动机器人系统,包括:运动机构、传感器系统、信息处理控制系统、电池电源供电系统、通信系统;其中,
运动机构包括:左车轮装置、右车轮装置,左车轮驱动电机系统、右车轮驱动电机系统,左连接框架装置、右连接框架装置,绳索卷绕机构、脚轮臂机构、绳索导向机构以及绳索;左、右车轮装置分别与左、右车轮驱动电机系统固定连接,左、右车轮驱动电机系统分别与左、右连接框架装置固定连接,左、右连接框架装置分别沿轴向固定连接在脚轮臂机构的两侧;绳索卷绕机构沿轴向通过轴承安装于脚轮臂机构的中部;绳索导向机构安装于脚轮臂机构的后部,并与脚轮臂机构的中心轴平行;绳索一端固定在绳索卷绕机构上,另一端通过脚轮臂机构中部固定于母机器人或固定锚点上;电池电源供电系统安装在运动机构上,为整个系统提供电源;传感器系统包括:绳索卷绕机构内的绳索拉力传感系统、运动导航定位传感器,二者分别用于感知绳索收放时的拉力和感知车体位置、方位角以及速度;通信系统,用于与母机器人中的上位机进行通信,接收上位机发送的相关运动任务指令信息,并将所述运动任务指令信息发送给信息处理控制系统;信息处理控制系统根据测量得到的绳索拉力、以及车体位置、方位角以及速度信息、车轮驱动电机电流信息以及上位机发送的运动任务指令信息,对车轮驱动力矩和绳索拉力基于功耗最小或其他原则进行优化,得到所需的运动控制指令;并将产生的运动控制指令转换为电信号发送给左、右车轮驱动电机系统和绳索卷绕机构,控制机器人系统按照期望的指令进行运动;绳索一端通过脚轮臂机构伸出固定在母机器人上,另一端固定在绳索卷绕机构上;通过绳索卷绕机构控制绳索的收放;在系绳的支撑作用下,随着绳索的收放,配合左车轮装置、右车轮装置的运动,机器人沿着极端地形下降到指定区域进行探测,结束后返回母机器人。
[0008]
进一步地,所述左、右车轮装置均包括:轮棘、轮网及轮框,轮框通过其中部的螺孔由螺栓与连接框架装置相连;轮网呈网格状,附着在轮框的外环面上;轮棘位于轮网外部,通过铆钉连接到轮框的外环面上,压紧轮网,增加极端地形的附着力。
[0009]
进一步地,所述左、右车轮驱动电机系统均包括:前端盖、后端盖、绕组装置、永磁体、前轴承、后轴承、电机轴、霍尔传感器和编码器,前、后轴承的内圈分别固定安装在电机轴前后的轴肩上;前端盖、后端盖分别固定安装在前、后轴承的外圈,永磁体沿前端盖的内环面分布;电机轴后侧装有霍尔传感器和编码器,用于电机控制;绕组装置包括:24个绕组及绕组支撑,绕组支撑固定安装在电机轴上,根据所需的磁场强度大小对应的匝数绕组缠绕在绕组支撑上。
[0010]
进一步地,所述左、右连接框架装置均包括:支撑框、框架电机连接板、外壳;外壳环绕于支撑框外,共同形成4个隔间,用于安装信息处理控制系统、电池电源供电系统、传感器系统中导航定位系统、通信系统;框架电机连接板通过轴孔与车轮驱动电机系统的电机轴固定连接。
[0011]
进一步地,所述绳索卷绕机构包括:卷绕支撑框架、卷绕输出侧齿轮、卷绕轴承、卷绕减速电机组合、卷绕电机侧齿轮、脚轮臂壳左连接环、卷绕壳轴承、脚轮臂左支撑板、绞盘驱动环、卷绕绞盘轴承、左连接环、绳索绞盘以及绳索拉力传感系统;卷绕减速电机组合包括:电机、减速器、制动器、编码器;所述卷绕支撑框架与连接框架装置固定连接,卷绕轴承的内圈、卷绕减速电机组合固定安装在卷绕支撑框架上,卷绕电机侧齿轮固定连接到卷绕减速电机组合输出轴上;卷绕输出侧齿轮安装在卷绕轴承外圈上,卷绕输出侧齿轮与卷绕
电机侧齿轮通过啮合进行齿轮传动,卷绕输出侧齿轮与绞盘驱动环固定连接,绞盘驱动环内侧通过卷绕绞盘轴承安装在绳索绞盘上,绞盘驱动环外侧通过卷绕壳轴承分别与脚轮臂壳左连接环、脚轮臂左支撑板连接,脚轮臂壳左连接环和脚轮臂左支撑板通过螺钉固定连接;绳索拉力传感系统一侧与绳索绞盘固定连接,另一侧通过弹簧与绞盘驱动环连接。
[0012]
进一步地,所述卷绕支撑框架采用镂空结构,卷绕减速电机组合驱动卷绕电机侧齿轮旋转,带动卷绕输出侧齿轮及与其固连的绞盘驱动环转动。
[0013]
进一步地,所述绳索拉力传感系统包括:10个均匀分布的减振弹簧、拉力传感器环形编码器输入侧、环形编码器输出侧、绞盘弹簧固定环;绞盘弹簧固定环与绳索绞盘固定连接,减振弹簧安装在绞盘驱动环和绞盘弹簧固定环嵌合的槽内,之间留有空隙,两者可相对运动;拉力传感器环形编码器输入侧固定连接在绞盘弹簧固定环上,环形编码器输出侧固定连接在绞盘驱动环上,当绳索具有拉力时,绞盘驱动环挤压减振弹簧,绞盘驱动环相对绞盘弹簧固定环绕中心轴相对无拉力时角度发生变化,拉力传感器环形编码器测量该角度变化并输出变化量,由该变化量与弹簧刚度系数得到力矩,由此进一步得到绳索拉力。
[0014]
进一步地,所述脚轮臂系统包括:脚轮臂、脚轮臂前支撑板、脚轮支撑框架、脚轮臂输出侧齿轮、脚轮臂轴承、脚轮臂减速电机组合、脚轮臂电机侧齿轮、脚轮臂壳右连接环、脚轮卷绕轴承、脚轮臂右支撑板、脚轮臂外壳、右连接环;脚轮臂减速电机组合包括:电机、减速器、制动器、编码器;脚轮臂系统通过脚轮支撑框架与连接框架装置固定连接,脚轮臂轴承内圈、脚轮臂减速电机组合分别固定安装在脚轮支撑框架上,脚轮臂电机侧齿轮固定连接到脚轮臂减速电机组合的电机输出轴上;脚轮臂输出侧齿轮安装在脚轮臂轴承外圈上,脚轮臂输出侧齿轮与脚轮臂电机侧齿轮通过啮合进行齿轮传动,脚轮臂输出侧齿轮与脚轮臂壳右连接环固定连接,脚轮臂壳右连接环和脚轮臂右支撑板固定连接;脚轮臂壳右连接环和脚轮臂右支撑板经过脚轮卷绕轴承连接到绳索绞盘上。
[0015]
进一步地,所述绳索导向装置包括:减速电机组合、导向驱动齿轮、导向输入齿轮、导向轴承、上导向轴、下导向轴、左垂直辊轴、右垂直辊轴、上直线轴承、下直线轴承,导向滚珠丝杠、丝杠螺母;减速电机组包括:电机、减速器、编码器;减速电机组合固定安装在脚轮臂左支撑板上,上导向轴、下导向轴的两端分别固定安装在脚轮臂左支撑板和脚轮臂右支撑板上;导向驱动齿轮固定安装在减速电机组合的电机输出轴上,导向输入齿轮固定安装在导向滚珠丝杠一侧,与导向驱动齿轮啮合;导向滚珠丝杠分别通过导向轴承安装在在脚轮臂左支撑板和脚轮臂右支撑板上;丝杠螺母安装在导向滚珠丝杠上,沿导向滚珠丝杠移动;上直线轴承、下直线轴承分别安装在上导向轴、下导向轴上,左垂直辊轴组件、右垂直辊轴组件固定安装在上、下直线轴承外圈上,且与丝杠螺母固定连接在一起;绳索穿过左垂直辊轴、右垂直辊轴和上直线轴承、下直线轴承之间形成的空隙;减速电机组合旋转带动导向驱动齿轮旋转,经过齿轮啮合传动,导向输入齿轮转动带动导向滚珠丝杠旋转,在导向滚珠丝杠和上导向轴、下导向轴作用下,丝杠螺母沿着导向滚珠丝杠水平移动,带动左垂直辊轴、右垂直辊轴移动,进一步带动绳索移动。
[0016]
在信息处理控制系统控制下绳索卷绕机构和绳索导向装置相配合从而实现绳索的规则缠绕,进一步实现绞盘所缠绕绳索长度最大化。
[0017]
本发明的一种星表极端地形绳系双轮移动机器人系统的工作方法,步骤如下:极端地形上,绳系双轮移动机器人系统从母机器人或着陆器上移动到地面,绳系双轮
移动机器人系统的绳索一端固定在母机器人上,绳索缠绕在绳索绞盘上,且另一端固定在绳索绞盘上;与母机器人或着陆器分离后,星表极端地形绳系双轮移动机器人系统沿着陡坡向下移动,根据测量得到的绳索拉力、以及车体位置、方位角以及速度信息、车轮驱动电机电流信息以及上位机发送的运动任务指令信息,对车轮驱动力矩和绳索拉力进行优化,通过差分驱动车轮驱动电机系统,车体按照期望的指令直线运动和转向,通过绳索卷绕机构的旋转绳索绞盘按照期望的指令控制绳索的收放来控制绳索拉力,在运动同时绳索导向机构控制绳索规则缠绕;在探测位置,进行原位探测,收集样本,绳系双轮移动机器人系统携带样本返回到母机器人或着陆器。
[0018]
本发明的有益效果:本发明能够用于极端地形行星表面运动、探测以及极端地形救援等任务。该系统结构具有小型轻量化的优点,能够满足母子系统部署质量体积的要求;同时这种系统结构重心低,容易静态稳定,便于进行控制和降低功耗。所采用的车轮驱动系统形式旋转惯量小,可以直接输出很大的驱动力矩,能够实现对力矩和绳索张力进行综合优化,从而可以降低功耗;并且可以更快速的响应滑动和跌落,从而能够更好的避免意外的发生。
附图说明
[0019]
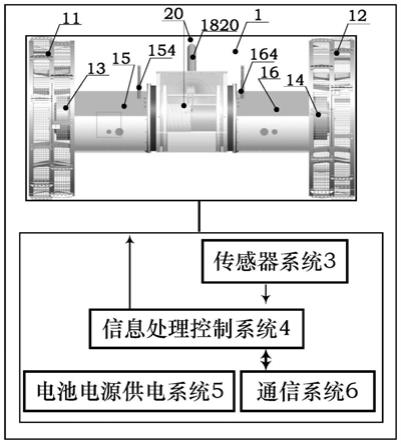
图1为本发明移动机器人系统结构示意图;图2 为左右车轮结构图;图3为左右车轮驱动电机系统剖视结构图;图4为绕组装置结构图;图5为连接框架装置侧面结构图;图6为连接框架装置结构图;图7为绳索卷绕机构、脚轮臂系统剖视结构图;图8为绳索卷绕机构(脚轮臂系统)电机驱动、齿轮传动结构图;图9为绳索拉力传感系统结构图;图10为脚轮臂系统结构图;图11为绳索导向装置剖视结构图。
具体实施方式
[0020]
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
[0021]
在本发明的描述中,需要说明的是,术语“中部”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“后部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0022]
参照图1、图7、图10、图11所示,本发明的一种星表极端地形绳系双轮移动机器人系统,包括:运动机构1、传感器系统3、信息处理控制系统4、电池电源供电系统5、通信系统6;其中,运动机构包括:左车轮装置11、右车轮装置12,左车轮驱动电机系统13、右车轮驱动电机系统14,左连接框架装置15、右连接框架装置16,绳索卷绕机构17、脚轮臂机构18、绳索导向机构19以及绳索20;左、右车轮装置分别与左、右车轮驱动电机系统固定连接,左、右车轮驱动电机系统分别与左、右连接框架装置固定连接,左、右连接框架装置分别沿轴向固定连接在脚轮臂机构18的两侧;绳索卷绕机构17沿轴向通过轴承安装于脚轮臂机构18的中央部位;绳索导向机构19安装于脚轮臂机构18的后部,绳索导向机构与脚轮臂机构的中心轴平行;绳索20一端固定在绳索卷绕机构17上,另一端通过脚轮臂机构18中部固定于母机器人或固定锚点上;电池电源供电系统5安装在运动机构上,为整个系统提供电源;传感器系统3包括:绳索卷绕机构内的绳索拉力传感系统、运动导航定位传感器,二者分别用于感知绳索收放时的拉力和感知车体位置、方位角以及速度;通信系统6,用于与母机器人中的上位机进行通信,接收上位机发送的相关运动任务指令信息,并将所述运动任务指令信息发送给信息处理控制系统3;信息处理控制系统根据测量得到的绳索拉力、以及车体位置、方位角以及速度信息、车轮驱动电机电流信息以及上位机发送的运动任务指令信息,对车轮驱动力矩和绳索拉力基于功耗最小或其他原则进行优化,得到所需的运动控制指令;并将产生的运动控制指令转换为电信号发送给左、右车轮驱动电机系统和绳索卷绕机构17,控制机器人系统按照期望的指令进行运动;绳索一端通过脚轮臂机构18伸出固定在母机器人上,另一端固定在绳索卷绕机构17上;通过绳索卷绕机构17控制绳索的收放;在系绳的支撑作用下,随着绳索的收放,配合左车轮装置11、右车轮装置12的运动,机器人沿着极端地形下降到指定区域进行探测,结束后返回母机器人。
[0023]
如图2所示,所述左、右车轮装置均包括:轮棘111、轮网112及轮框113,轮框113通过中部的螺孔由螺栓与连接框架装置15相连;轮网112呈网格状,附着在轮框113的外环面上,轮棘111位于轮网112外部,通过铆钉连接到轮框113的外环面上,压紧轮网,增加极端地形的附着力。
[0024]
如附图3所示,所述左、右车轮驱动电机系统均包括:前端盖131、后端盖132、绕组装置133、永磁体134、前轴承135、后轴承136、电机轴137、霍尔传感器和编码器,前、后轴承的内圈分别固定安装在电机轴137前后的轴肩上;前端盖131、后端盖132分别固定安装在前、后轴承的外圈,永磁体134沿前端盖131的内环面分布,总计24个;电机轴137后侧装有霍尔传感器和编码器,用于电机控制;如附图4所示,绕组装置133包括:24个绕组1331及绕组支撑1332,绕组支撑1332固定安装在电机轴137上,根据所需的磁场强度大小对应的匝数绕组1331缠绕在绕组支撑1332上。
[0025]
为了减重,绕组支撑1332采用镂空结构;所述车轮驱动电机系统旋转惯量小,可直接输出大驱动力矩,响应快,能够实现车轮驱动力矩和绳索张力综合优化、降低功耗,并且快速响应滑动和跌落。
[0026]
如附图5、图6所示,所述左、右连接框架装置均包括:支撑框151、框架电机连接板
152、外壳153;外壳153环绕于支撑框151外,共同形成4个隔间,用于安装信息处理控制系统4、电池电源供电系统5、传感器系统3中导航定位系统、通信系统6等部件。同时为了能够完成特定的探测任务,这些隔间可以用于搭载各类探测载荷仪器,如探照灯、摄像头、天线154等。框架电机连接板152通过轴孔与车轮驱动电机系统的电机轴137固定连接。为了减重,支撑框151采用如附图5所示的镂空结构。
[0027]
两个连接框架装置结构通过优化隔间,重量轻、重心低,容易实现静态稳定,降低两轮控制难度及功耗。
[0028]
如附图7,图8所示,所述绳索卷绕机构17包括:卷绕支撑框架1701、卷绕输出侧齿轮1702、卷绕轴承1703、卷绕减速电机组合1709、卷绕电机侧齿轮1710、脚轮臂壳左连接环1704、卷绕壳轴承1705、脚轮臂左支撑板1706、绞盘驱动环1707、卷绕绞盘轴承1708、左连接环1711、绳索绞盘1712以及绳索拉力传感系统172;卷绕减速电机组合1709包括:电机、减速器、制动器、编码器;所述卷绕支撑框架1701与连接框架装置15固定连接,卷绕轴承1703的内圈、卷绕减速电机组合1709固定安装在卷绕支撑框架1701上,卷绕电机侧齿轮1710固定连接到卷绕减速电机组合1709输出轴上;卷绕输出侧齿轮1702安装在卷绕轴承1703外圈上,卷绕输出侧齿轮1702与卷绕电机侧齿轮1710通过啮合进行齿轮传动,卷绕输出侧齿轮1702与绞盘驱动环1707固定连接,绞盘驱动环1707内侧通过卷绕绞盘轴承1708安装在绳索绞盘1712上,绞盘驱动环1707外侧通过卷绕壳轴承1705分别与脚轮臂壳左连接环1704、脚轮臂左支撑板1706连接,脚轮臂壳左连接环1704和脚轮臂左支撑板1706通过螺钉固定连接;绳索拉力传感系统172一侧与绳索绞盘1712固定连接,另一侧通过弹簧与绞盘驱动环1707连接。
[0029]
当绳索具有拉力时,绞盘驱动环1707挤压减振弹簧1720,绞盘驱动环1707相对绞盘弹簧固定环1722绕中心轴相对无拉力时角度发生变化。
[0030]
所述卷绕支撑框架1701采用镂空结构,卷绕减速电机组合1709驱动卷绕电机侧齿轮1710旋转,进一步带动卷绕输出侧齿轮1702及与其固连的绞盘驱动环1707转动。
[0031]
如附图9所示,所述绳索拉力传感系统172包括:10个均匀分布的减振弹簧1720、拉力传感器环形编码器输入侧1721、环形编码器输出侧1723、绞盘弹簧固定环1722;绞盘弹簧固定环1722与绳索绞盘1712固定连接,减振弹簧1720安装在绞盘驱动环1707和绞盘弹簧固定环1722嵌合的槽内,之间留有空隙,两者可相对运动;拉力传感器环形编码器输入侧1721固定连接在绞盘弹簧固定环1722上,环形编码器输出侧1723固定连接在绞盘驱动环1707上,当绳索具有拉力时,绞盘驱动环1707挤压减振弹簧,绞盘驱动环1707相对绞盘弹簧固定环1722绕中心轴相对无拉力时角度发生变化,拉力传感器环形编码器测量该角度变化并输出变化量,由该变化量与弹簧刚度系数得到力矩,由此进一步得到绳索拉力。
[0032]
所述绳索拉力传感系统172除可以测量绳索拉力外,由于绳索绞盘通过减振弹簧连接到绞盘驱动环1707,在机器人系统突然坠落时,绳索瞬时张力可以部分被减振弹簧吸收,从而可以降低机器人和绳索上产生的冲击载荷,降低断绳的风险;绞盘驱动环1707在经过绳索拉力传感系统的减振弹簧缓冲后最终带动绞盘运动,实现绳索20的收放。
[0033]
如附图7、图10所示,所述脚轮臂系统18包括:脚轮臂1820、脚轮臂前支撑板1821、脚轮支撑框架1801、脚轮臂输出侧齿轮1802、脚轮臂轴承1803、脚轮臂减速电机组合1809、脚轮臂电机侧齿轮1810、脚轮臂壳右连接环1804、脚轮卷绕轴承1805、脚轮臂右支撑板
1806、脚轮臂外壳1807、右连接环1811;脚轮臂减速电机组合1809包括:电机、减速器、制动器、编码器;脚轮臂系统18通过脚轮支撑框架1801与连接框架装置16固定连接,脚轮臂轴承1803内圈、脚轮臂减速电机组合1809分别固定安装在脚轮支撑框架1801上,脚轮臂电机侧齿轮1810固定连接到脚轮臂减速电机组合1809的电机输出轴上;脚轮臂输出侧齿轮1802安装在脚轮臂轴承1803外圈上,脚轮臂输出侧齿轮1802与脚轮臂电机侧齿轮1810通过啮合进行齿轮传动,脚轮臂输出侧齿轮1802与脚轮臂壳右连接环1804固定连接,脚轮臂壳右连接环1804和脚轮臂右支撑板1806固定连接;脚轮臂壳右连接环1804和脚轮臂右支撑板1806经过脚轮卷绕轴承1805连接到绳索绞盘1712上。
[0034]
所述脚轮支撑框架采用镂空结构,减轻重量;由此,脚轮臂减速电机组合1809驱动脚轮臂电机侧齿轮1810运动,进一步带动脚轮臂输出侧齿轮1802及与其固连的脚轮臂壳右连接环1804、脚轮臂右支撑板1806转动,从而带动脚轮臂杆转动。
[0035]
如附图11所示,所述绳索导向装置19包括:减速电机组合1901、导向驱动齿轮1902、导向输入齿轮1903、导向轴承1904、1914、上导向轴1905、下导向轴1906、左垂直辊轴1907、右垂直辊轴1908、上直线轴承1909、下直线轴承1910,导向滚珠丝杠1911、丝杠螺母1912;减速电机组合1901包括:电机、减速器、编码器;减速电机组合1901固定安装在脚轮臂左支撑板1706上,上导向轴1905、下导向轴1906的两端分别固定安装在脚轮臂左支撑板1706和脚轮臂右支撑板1806上;导向驱动齿轮1902固定安装在减速电机组合1901的电机输出轴上,导向输入齿轮1903 固定安装在导向滚珠丝杠1911一侧,与导向驱动齿轮1902啮合;导向滚珠丝杠1911分别通过导向轴承1904、1914安装在在脚轮臂左支撑板1706和脚轮臂右支撑板1806上;丝杠螺母1912安装在导向滚珠丝杠1911上,沿导向滚珠丝杠移动;上直线轴承1909、下直线轴承1910分别安装在上导向轴1905、下导向轴1906上,左垂直辊轴组件1907、右垂直辊轴组件1908固定安装在上、下直线轴承外圈上,且与丝杠螺母1912固定连接在一起;绳索穿过左垂直辊轴1907、右垂直辊轴1908和上直线轴承1909、下直线轴承1910之间形成的空隙;减速电机组合1901旋转带动导向驱动齿轮1902旋转,经过齿轮啮合传动,导向输入齿轮1903转动带动导向滚珠丝杠1911旋转,在导向滚珠丝杠1911和上导向轴1905、下导向轴1906作用下,丝杠螺母1912沿着导向滚珠丝杠1911水平移动,带动左垂直辊轴1907、右垂直辊轴1908移动,进一步带动绳索20移动。
[0036]
在信息处理控制系统控制下绳索卷绕机构17和绳索导向装置19相配合从而实现绳索的规则缠绕,进一步实现绞盘所缠绕绳索长度最大化。
[0037]
本发明的一种星表极端地形绳系双轮移动机器人系统的工作方法,步骤如下:极端地形上,绳系双轮移动机器人系统从母机器人或着陆器上移动到地面,绳系双轮移动机器人系统的绳索一端固定在母机器人上,绳索缠绕在绳索绞盘上,且另一端固定在绳索绞盘上;与母机器人或着陆器分离后,星表极端地形绳系双轮移动机器人系统沿着陡坡向下移动,根据测量得到的绳索拉力、以及车体位置、方位角以及速度信息、车轮驱动电机电流信息以及上位机发送的运动任务指令信息,对车轮驱动力矩和绳索拉力基于功耗最小或其他原则进行优化,通过差分驱动车轮驱动电机系统,车体按照期望的指令直线运动和转向,通过绳索卷绕机构的旋转绳索绞盘按照期望的指令控制绳索的收放来控制绳索拉力,在运动同时绳索导向机构控制绳索规则缠绕;在探测位置,进行原位探测,收集样本,绳系双轮移动机器人系统携带样本返回到母机器人或着陆器。
[0038]
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1