一种火箭推力下降故障下基于RBFNN的救援轨道决策方法与流程
一种火箭推力下降故障下基于rbfnn的救援轨道决策方法
技术领域
1.本发明涉及故障下运载火箭救援技术领域,尤其涉及一种火箭推力下降故障下基于rbfnn的救援轨道决策方法。
背景技术:
2.发动机作为火箭动力装置,是全箭飞行可靠性及安全性的决定性因素,其可靠性关乎整个飞行任务的成败。在实际飞行任务中,运载火箭发动机故障等原因易造成推力下降,如果继续沿用标称弹道条件下的制导控制方案将难以完成任务。为了主动避免有效载荷的坠落,需要依据故障状态在线重规划救援轨道和飞行轨迹,使载荷进入救援轨道。
3.目前对于推力下降故障下在线救援的问题,主要的思路是基于动力学模型把救援轨道决策和轨迹优化两个问题耦合在一起在线优化[1,2]。song[1]提出了一种在运载火箭推力下降故障下的自主救援策略和算法,结合入轨点地心角估计、凸优化、自适应配点法等,在线为原耦合优化问题提供一个好的初值,以提高在线轨迹规划的计算效率。li[2]为保证动力系统故障时的飞行安全,提出了一种基于凸优化的运载火箭在线轨迹优化算法,以得到一种高精度、高效率的在线轨迹优化方法。上述方法把救援轨道决策和飞行轨迹两个问题耦合在一起优化,由于救援轨道的未知,最优解的搜索空间很大,影响在线部分的计算效率。
技术实现要素:
[0004]
根据现有技术存在的问题,本发明公开了一种火箭推力下降故障下基于rbfnn的救援轨道决策方法,具体包括如下方式:
[0005]
在地心惯性坐标系中建立火箭的上升段二级飞行动力学方程,以不同的故障时刻、推力下降百分比设置边界条件和约束条件,构建一系列推力下降故障下圆轨道半长轴最大优化问题;
[0006]
采用自适应伪谱法离线求解圆轨道半长轴最大优化问题,得到的故障状态最优救援轨道的样本集,其中样本集的输入特征为故障状态,所述故障状态包括推力故障的时刻、推力下降的大小、位置、速度和质量,其中样本集的输出特征为最优救援轨道根数,所述轨道根数包括轨道半长轴、倾角、升交点赤经;
[0007]
采用最大最小法对故障状态最优救援轨道样本数据进行归一化处理,将所有数据规范化到[-1,1]之间,采用正交最小二乘法选择径向基神经网络数据中心,其中径向基函数选高斯基函数,离线训练径向基神经网络,从而建立故障状态到最优救援轨道非线性映射关系;
[0008]
将径向基神经网络迁移到火箭实际飞行中,以飞行的故障状态作为输入,该径向基神经网络在线决策出救援轨道。
[0009]
进一步的,构建圆轨道半长轴最大优化问题时:
[0010]
设x1轴在赤道平面内指向发射时刻本初子午线方向,z1轴垂直赤道平面指向北极,
y1轴满足右手定则,在地心惯性坐标系中建立火箭的上升段二级飞行动力学方程如下:
[0011][0012][0013][0014]
式中r,v为运载火箭的位置、速度向量,μ=gm为地球引力常数,m是火箭的总质量,i
sp
为火箭的发动机比冲;u=[u
x
,u
y
,u
z
]
t
为发动机的推力单位矢量分量;当发动机发生故障,推力下降的比例是η,推力大小是(1-η)t
nom
,t
nom
是发动机标称推力;
[0015]
在推力下降故障情况下,发动机比冲不变,推进剂的秒耗量下降η,总飞行时间超过标称的飞行时间,假定发动机推力下降故障出现时刻为t0,运载火箭需要以t0时刻的状态为起始点优化救援轨迹,因此起始点等式约束条件表示为
[0016]
x(t0)=x0ꢀꢀ
(4)
[0017]
式中,x0是起始点的状态,轨道根数与终端状态之间的非线性关系表示为
[0018]
[a
f
,e
f
,i
f
,ω
f
,ω
f
]
t
=ψ(r(t
f
),v(t
f
))
ꢀꢀ
(5)
[0019]
t
f
为终端时刻,a
f
,e
f
,i
f
,ω
f
,ω
f
分别是终端轨道半长轴、偏心率、倾角、升交点赤经、近地点幅角;
[0020]
用m
f
表示剩余燃料耗尽后运载火箭与有效载荷的总质量,地球半径是r0;定义最低安全轨道高度为h
safe
,终端质量和高度应当满足:
[0021]
m(t
f
)≥m
f
,h
safe
≤r(t
f
)-r0ꢀꢀ
(6)
[0022]
发生推力下降故障,同等近地点高度下将载荷送入圆轨道所需能量小于椭圆轨道,因此在当前轨道面内搜寻最大高度圆轨道,将其作为救援轨道,推力下降故障下最高圆轨道的求解描述为半长轴最大优化问题:
[0023]
目标函数:min j=-a(t
f
)
[0024]
边界条件:式(4),式(6)
[0025]
动力学约束:式(1)-(3)
[0026]
控制约束:||u||=1
[0027]
终端约束的轨道倾角升交点赤经可以根据运载火箭当前位置确定。由于采用了上述技术方案,本发明提供的一种火箭推力下降故障下基于rbfnn的救援轨道决策方法,具有的有益效果:
[0028]
(1)针对运载火箭推力下降故障下的复杂的轨迹优化问题,本发明将其解耦为救援轨道决策与简化的轨迹优化问题。
[0029]
(2)径向基神经网络能够很好拟合的“救援轨道-故障状态”非线性关系,而且在线决策时间与轨迹优化时间相比几乎可以忽略。
[0030]
(3)本发明可以在线快速决策出最优救援轨道,为后续在线轨迹优化提供合理的终端约束,那么在线轨迹优化问题的复杂度也会大大降低,从而整体上提高在线救援的计算效率。
附图说明
[0031]
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0032]
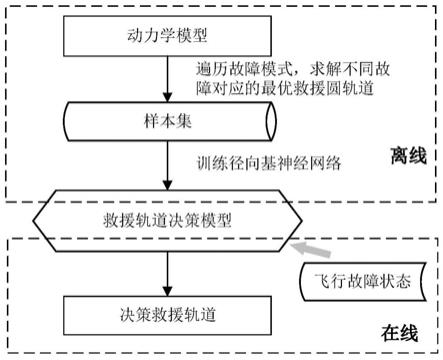
图1为本发明中救援轨道决策总体策略
[0033]
图2为本发明中样本集产生流程图
[0034]
图3为本发明中救援轨道决策结果
具体实施方式
[0035]
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
[0036]
如图1所示的一种火箭推力下降故障下基于rbfnn的救援轨道决策方法,具体步骤如下:
[0037]
s1:以两级运载火箭为研究对象,假设推力下降故障发生在二级飞行段。此时大气稀薄,可以忽略气动力影响。定义地心惯性坐标系:原点在地心,x1轴在赤道平面内指向发射时刻本初子午线方向,z1轴垂直赤道平面指向北极,y1轴满足右手定则。在地心惯性坐标系中建立火箭的上升段二级飞行动力学方程如下:
[0038][0039][0040][0041]
式中r,v为运载火箭的位置、速度向量。μ=gm为地球引力常数,m是火箭的总质量,i
sp
为火箭的发动机比冲。u=[u
x
,u
y
,u
z
]
t
为发动机的推力单位矢量分量,是可控的。当发动机发生故障,推力下降的比例是η,推力大小是(1-η)t
nom
,t
nom
是发动机标称推力。推力下降故障情况下,发动机比冲不变,推进剂的秒耗量也下降η,总飞行时间可以超过标称的飞行时间。假定发动机推力下降故障出现时刻为t0,运载火箭需要以t0时刻的状态为起始点优化救援轨迹,因此起始点等式约束条件可表示为
[0042]
x(t0)=x0ꢀꢀ
(4)
[0043]
式中,x0是起始点的状态。轨道根数与终端状态之间的非线性关系表示为
[0044]
[a
f
,e
f
,i
f
,ω
f
,ω
f
]
t
=ψ(r(t
f
),v(t
f
))
ꢀꢀ
(5)
[0045]
其中,t
f
为终端时刻,a
f
,e
f
,i
f
,ω
f
,ω
f
分别是终端轨道半长轴、偏心率、倾角、升交点赤经、近地点幅角,。
[0046]
用m
f
表示剩余燃料耗尽后运载火箭与有效载荷的总质量,地球半径是r0。定义最低安全轨道高度为h
safe
,终端质量和高度应当满足:
[0047]
m(t
f
)≥m
f
,h
safe
≤r(t
f
)-r0ꢀꢀ
(6)
[0048]
发生推力下降故障,为避免坠落,提升轨道高度是首要目标。同等近地点高度下将
载荷送入圆轨道所需能量小于椭圆轨道,因此在当前轨道面内搜寻最大高度圆轨道,将其作为救援轨道。由于圆轨道不存在近地点的概念,终端约束不需要约束近地点幅角。推力下降故障下最高圆轨道的求解可以描述为半长轴最大(mta)优化问题:
[0049]
目标函数:min j=-a(t
f
)
[0050]
边界条件:式(4),式(6)
[0051]
动力学约束:式(1)-(3)
[0052]
控制约束:||u||=1
[0053]
终端约束的轨道倾角升交点赤经可以根据运载火箭当前位置确定。
[0054]
s2:实际飞行中,由于存在噪声干扰,火箭的位置、速度、质量在标称弹道附近。因此,故障的状态是故障发生的时间、推力下降的大小、位置、速度、质量。遍历不同故障状态,构建的mta优化问题,采用自适应伪谱法求解最优控制问题,如图2所示。为了保证知识库的丰富性,样本集的产生需遍历尽可能多的故障状态。求解得到的“故障模式-救援轨道”数据集,可作为径向基神经网络训练的样本集。
[0055]
s3:为了消除各维数据间数量级差别,避免因为输入、输出数据数量级差别较大而造成的预测误差较大,需要对数据做归一化处理。采用最大最小法对数据归一化,将所有数据规范化到[-1,1]之间。考虑到箭载计算机的计算任务繁多,救援轨道决策所占用的计算资源越少越好。采用正交最小二乘法选择rbf网络数据中心,建立“故障状态-最优救援轨道”非线性映射关系。
[0056]
隐藏单元由基函数激活,本文采用高斯基函数,第j个隐藏层的输出为:
[0057][0058]
是第i个输入数据,μ
j
是隐藏节点的基函数中心,σ
j
是径向基函数扩展速度。基函数中心与扩展速度由网络的训练决定。输出层对径向基函数隐藏层的输出进行线性组合以生成预期的输出。输出层第k个节点的输出为
[0059][0060]
式中,w
jk
为第j个隐层神经元到第k输出神经元的权重。为了达到合适的逼近精度,通过训练来确定以下参数:隐藏层神经元的数量、每个隐藏层神经元基函数中心、径向基函数输出传递到求和层的权重。
[0061]
s4:将救援轨道决策模型在线迁移应用,以实际飞行的故障状态作为输入,可快速在线决策出救援轨道根数。
[0062]
实施例:
[0063]
在本节中,以运载火箭的整个二级飞行阶段为研究对象,参数来自文献[1]。样本集建立的故障的状态分布按发生时间0~375s,1s为步长;推力下降大小13%~40%,1%为步长。除去可进入目标轨道和救援轨道高度低于160km的故障状态,需要救援的故障状态如
图3所示。在样本集中,随机抽取90%的数据作为训练集,剩余10%的数据作为测试集。采用径向基神经网络来建立故障状态到救援轨道的非线性映射。径向基神经网络训练的扩散因子是1,最终训练好的隐藏层神经元数量是50。测试集中,决策出的轨道根数与离线用mta优化出的轨道根数如图3所示。半长轴决策的绝对误差在[-0.148,0.774km]区间,相对误差在0.015%以内。轨道倾角、升交点赤经的绝对误差在10-4
deg以内,最大相对误差在10-5
量级。
[0064]
表1不同机器学习模型的rmse
[0065][0066]
表1是不同机器学习模型的结果均方根误差(rmse)的对比。线性回归得到的均方根误差比非线性回归方法的大,是因为故障状态与救援轨道根数是非线性关系,适合用非线性的函数逼近方法。与其他几种的机器模型相比,径向基神经网络模型的rmse更小,意味着其在映射“故障状态-最优救援轨道”有更好函数逼近的效果。
[0067]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
[0068]
[1]z.song,c.wang,q.gong,joint dynamic optimization of the target orbit and flight trajectory of a launch vehicle based on state-triggered indices,acta astronaut.,174(2020)82-93.
[0069]
[2]y.li,b.j.pang,c.z.wei,n.g.cui,y.b.liu,online trajectory optimization for power system fault of launch vehicles via convex programming,aerosp.sci.technol.,98(2020)p.1(1-10).
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1