一种高速公路违章巡查无人机的制作方法
1.本发明属于无人机技术领域,具体的说是一种高速公路违章巡查无人机。
背景技术:
2.无人驾驶飞机简称“无人机”(“uav”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。
3.目前用于高速公路违章巡查的无人机的体积和重量均较大,因而在无人机使用完以后将无人机装上车比较麻烦,需要两个人抬着才可以完成,且由于无人机体积较大,会在车内占用较大的空间,进而使得车内容纳量大大减小;
4.同时,由于操作人员操作不娴熟等问题很容易使得无人机撞向障碍物,当无人机撞向硬物时,无人机的叶片会停止转动,进而导致无人机发生坠落,而当无人机撞向软质障碍物时,如广告布等等,无人机高速旋转的叶片将会使得软质障碍物发生损坏。
5.为此,本发明提出了一种高速公路违章巡查无人机来解决上述问题。
技术实现要素:
6.为了弥补现有技术的不足,解决当无人机撞向硬物时,无人机的叶片会停止转动,进而导致无人机发生坠落,而当无人机撞向软质障碍物时,如广告布等等,无人机高速旋转的叶片将会使得软质障碍物发生损坏以及无人机装车不便的问题,本发明提出的一种高速公路违章巡查无人机。
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种高速公路违章巡查无人机,包括无人机机身、外防撞环、转动叶片、内活动环和摄像头;所述无人机机身整体为s形结构;所述无人机机身的底部活动设有摄像头;所述无人机机身的两侧面为平面结构,且无人机机身的两侧面通过安装板活动设有第一支撑杆;所述第一支撑杆的一端通过销轴活动铰接在安装板上;所述第一支撑杆的内部开设有滑动空腔,滑动空腔与活塞板相互滑动连接;所述活塞板的外侧面与第二支撑杆的一端固连,第二支撑杆的另一端伸出第一支撑杆的外侧端;所述活塞板的表面开设有容纳槽;所述容纳槽的底部通过弹簧与弹性插接柱固连,弹性插接柱位于滑动空腔内壁的弧形卡槽内;所述滑动空腔的两端均开设有弧形卡槽;所述第二支撑杆的外侧端的上表面固定设有竖向安装杆;所述竖向安装杆的顶部设有转动叶片;所述竖向安装杆上位于转动叶片的下方活动套设有内活动环;所述竖向安装杆上位于内活动环的上下两侧固定设有挡环;所述竖向安装杆的外边缘位于内活动环的内部固定设有第二橡胶圆筒;所述第二橡胶圆筒的内侧壁与竖向安装杆的外表面固定粘接;所述第二橡胶圆筒的外侧壁与内活动环不连接;所述活塞板位于滑动空腔内侧端的位置时,第二橡胶圆筒将内活动环撑紧在两组挡环之间;所述内活动环的外围处设有外防撞
环;所述外防撞环和内活动环之间通过连接杆件固连;所述转动叶片的外侧端未伸出外防撞环的外边缘;所述外防撞环和内活动环均位于第一支撑杆的上方;所述第二支撑杆和竖向安装杆的内部设有贯穿的第一气流通道;所述第一气流通道的两端分别与滑动空腔的内部、第二橡胶圆筒的内部连通;所述无人机机身的底部固定设有支撑构件;所述支撑构件由两组向外倾斜的支撑腿和水平支撑板构成;所述水平支撑板固定安装在两组所述支撑腿的底端;
8.工作时,本发明通过设置超出转动叶片外边缘的外防撞环,进而避免无人机在飞行的过程中转动叶片撞向障碍物,如电线杆、树干等而停止运转,从而可避免由于转动叶片停止运转而导致的无人机坠落的现象发生,同时本发明中的第二支撑杆可收缩在第一支撑杆上的滑动空腔内,进而可减小无人机的整体体积,便于收纳;
9.在实际使用时,由于转动叶片的外侧端未伸出外防撞环的外侧壁边缘,进而当无人机由于操作不当而撞向硬质障碍物时,不会阻碍转动叶片的旋转,操作者可以通过遥控器继续控制无人机进而使其向远离障碍物的方向移动,避免发生无人机坠落的现象;同时当无人机的转动叶片撞向软质障碍物时,如较细的树枝或者高速路上软质广告牌等等,此时外防撞环可防止转动叶片与软质障碍物接触,进而可避免软质障碍物发生损坏;
10.当无人机使用完以后需要装上车时,此时可将第一支撑杆和第二支撑杆翻转至竖直状态,此时外防撞环可与地面接触可作为滚轮使用,进而便于将无人机移动至车辆停靠的位置,当需要将无人机搬上车时,此时可将无人机的无人机机身向下按压,此时第二支撑杆将会收缩在滑动空腔的内部,此时无人机的体积将会更小,更加便于收纳;同时,当第二支撑杆收纳在滑动空腔的内部时,此时与第二支撑杆固连的活塞板将会脱离滑动空腔外侧端的弧形卡槽并与滑动空腔内侧端的弧形卡槽相互插接,进而将滑动空腔的位置固定,同时由于活塞板挤压滑动空腔内部的气体,滑动空腔内部的气体将会通过第一气流通道进入第二橡胶圆筒的内部,进而使得第二橡胶圆筒发生膨胀,此时第二橡胶圆筒将会把内活动环撑紧,内活动环不能绕着竖向安装杆进行转动,进而防止将无人机放在车上时,无人机会在装载车发生晃动时在外防撞环的作用下移动。
11.优选的,所述外防撞环的外边缘均匀设有u形杆;所述u形杆的两端活动插设在外防撞环内部的柱状空槽内;所述u形杆的两端均通过弹簧与柱状空槽的内侧端固连;所述u形杆在外防撞环的边缘绕外防撞环的中心轴线呈等距环形排列;工作时,由于位于外防撞环外边缘处u形杆通过弹簧与柱状空槽的内侧端固连,进而当无人机撞向障碍物时,此时障碍物将会首先与u形杆接触并挤压u形杆,u形杆由于与弹簧固连而具有一定的弹性,进而可以起到缓冲的作用,防止外防撞环被撞变形,同时u形杆会在弹簧的作用力下反弹,进而使得外防撞环向远离障碍物的方向移动。
12.优选的,所述u形杆的竖直杆件上套设有第一橡胶圆筒;所述第一橡胶圆筒的两端均设有出气孔;工作时,第一橡胶圆筒可以进一步起到缓冲的作用,当障碍物撞向第一橡胶圆筒时,第一橡胶圆筒会通过其上的出气孔缓慢的排气,进而将作用在第一橡胶圆筒上的力通过排气的方式缓慢的释放掉,最终作用在u形杆上的力会大大减小,进而起到很好的缓冲效果。
13.优选的,所述第一支撑杆的上表面开设有水平滑槽;所述水平滑槽的内部滑动设有滑动块;所述滑动块的上表面与清洁板的底端固连;所述清洁板靠近第一橡胶圆筒的侧
面均匀设有清洁刷毛;工作时,当无人机完成违章巡查工作以后,将第一支撑杆和第二支撑杆翻转至竖直方向并将外防撞环作为滚轮来移动无人机时,此时当位于u形杆上的第一橡胶圆筒经过地面再经过清洁板表面的清洁刷毛时,清洁刷毛将会将第一橡胶圆筒表面的灰尘、小颗粒石子等杂质刷下,进而避免小颗粒石子粘附在第一橡胶圆筒的表面造成第一橡胶圆筒容易被硌破,同时将第一橡胶圆筒表面的杂质除去可防止装车时污染车厢内部环境。
14.优选的,所述滑动块与弹簧压缩管的一端固连,弹簧压缩管的另一端与水平滑槽靠近安装板的一端固连;所述清洁板的内部开设有分气腔;所述分气腔通过滑动块上的第二气流通道与弹簧压缩管的内部连通;所述清洁板上设有清洁刷毛的侧面均匀开设有喷气孔;所述喷气孔与分气腔的内部相互连通,且喷气孔位于清洁刷毛之间的间隙内;工作时,当无人机移动至装车位置时,此时可将无人机机身向下按压,使得第二支撑杆收缩在滑动空腔的内部,同时外防撞环边缘的u形杆也将会将清洁板向靠近第一支撑杆内侧端的方向进行移动,此时清洁板挤压弹簧压缩管,弹簧压缩管内部的气体将会通过滑动块上的第二气流通道进入分气腔的内部,并最终从清洁板上的喷气孔逸出,进而可将清洁刷毛上的杂质吹下,起到清理杂质的作用。
15.优选的,所述水平支撑板上均匀插设有若干组竖向活动杆;所述竖向活动杆的顶部均与上挡板固连;所述竖向活动杆的底部均与下挡板固连;所述竖向活动杆上位于水平支撑板和下挡板之间活动套设有弹簧;工作时,当无人机落地时,由于竖向活动杆具有一定的伸缩能力,进而当无人机即使落在不平整的地面时,此时地面上凸起的部位将会将竖向活动杆向上顶起,而不会使得整个水平支撑板发生倾斜,进而使得无人机仍然可以处于相对于地面水平的状态,同时由于竖向活动杆上套设有弹簧,进而可以起到减震的作用,防止无人机落地时由于操作不当而使得无人机撞击地面导致内部元件损坏。
16.本发明的有益效果如下:
17.1.本发明所述的一种高速公路违章巡查无人机,本发明通过设置超出转动叶片外边缘的外防撞环,进而避免无人机在飞行的过程中转动叶片撞向障碍物,如电线杆、树干等而停止运转,从而可避免由于转动叶片停止运转而导致的无人机坠落的现象发生,同时本发明中的第二支撑杆可收缩在第一支撑杆上的滑动空腔内,进而可减小无人机的整体体积,便于收纳。
18.2.本发明所述的一种高速公路违章巡查无人机,通过设置清洁板和弹簧压缩管,当将第一支撑杆和第二支撑杆翻转至竖直方向并将外防撞环作为滚轮来移动无人机时,此时当位于u形杆上的第一橡胶圆筒经过清洁刷毛时,清洁刷毛将会将第一橡胶圆筒表面的灰尘、小颗粒石子等杂质刷下,避免小颗粒石子粘附在第一橡胶圆筒的表面造成第一橡胶圆筒容易被硌破,同时将第一橡胶圆筒表面的杂质除去可防止装车时污染车厢内部环境,同时弹簧压缩管内部的气体可将清洁刷毛上的杂质吹下。
19.3.本发明所述的一种高速公路违章巡查无人机,通过设置竖向活动杆,由于竖向活动杆具有一定的伸缩能力,进而当无人机即使落在不平整的地面时,此时地面上凸起的部位将会将竖向活动杆向上顶起,而不会使得整个水平支撑板发生倾斜,进而使得无人机仍然可以处于相对于地面水平的状态,同时由于竖向活动杆上套设有弹簧,进而可以起到减震的作用,防止无人机落地时由于操作不当而使得无人机撞击地面导致内部元件损坏。
附图说明
20.下面结合附图对本发明作进一步说明。
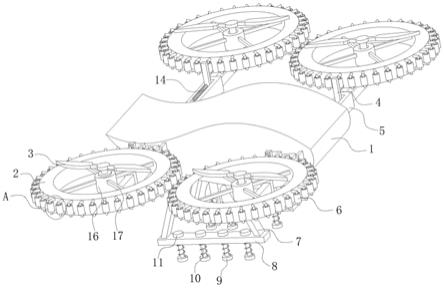
21.图1是本发明的结构示意图;
22.图2是本发明中第一支撑杆和第二支撑杆的连接状态图;
23.图3是图1中a处局部放大图;
24.图4是图2中b处局部放大图;
25.图5是图2中c处局部放大图;
26.图6是图2中d处局部放大图;
27.图中:无人机机身1、外防撞环2、转动叶片3、清洁板4、第一支撑杆5、第一橡胶圆筒6、支撑腿7、水平支撑板8、下挡板9、竖向活动杆10、上挡板11、u形杆12、出气孔13、弹簧压缩管14、水平滑槽15、内活动环16、连接杆件17、第一气流通道18、竖向安装杆19、第二支撑杆20、滑动空腔21、安装板22、弧形卡槽23、柱状空槽24、清洁刷毛26、分气腔27、喷气孔29、第二橡胶圆筒30、挡环31、第二气流通道32、滑动块33、容纳槽34、活塞板36、弹性插接柱37、摄像头39。
具体实施方式
28.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
29.如图1至图6所示,本发明所述的一种高速公路违章巡查无人机,包括无人机机身1、外防撞环2、转动叶片3、内活动环16和摄像头39;所述无人机机身1整体为s形结构;所述无人机机身1的底部活动设有摄像头39;所述无人机机身1的两侧面为平面结构,且无人机机身1的两侧面通过安装板22活动设有第一支撑杆5;所述第一支撑杆5的一端通过销轴活动铰接在安装板22上;所述第一支撑杆5的内部开设有滑动空腔21,滑动空腔21与活塞板36相互滑动连接;所述活塞板36的外侧面与第二支撑杆20的一端固连,第二支撑杆20的另一端伸出第一支撑杆5的外侧端;所述活塞板36的表面开设有容纳槽34;所述容纳槽34的底部通过弹簧与弹性插接柱37固连,弹性插接柱37位于滑动空腔21内壁的弧形卡槽23内;所述滑动空腔21的两端均开设有弧形卡槽23;所述第二支撑杆20的外侧端的上表面固定设有竖向安装杆19;所述竖向安装杆19的顶部设有转动叶片3;所述竖向安装杆19上位于转动叶片3的下方活动套设有内活动环16;所述竖向安装杆19上位于内活动环16的上下两侧固定设有挡环31;所述竖向安装杆19的外边缘位于内活动环16的内部固定设有第二橡胶圆筒30;所述第二橡胶圆筒30的内侧壁与竖向安装杆19的外表面固定粘接;所述第二橡胶圆筒30的外侧壁与内活动环16不连接;所述活塞板36位于滑动空腔21内侧端的位置时,第二橡胶圆筒30将内活动环16撑紧在两组挡环31之间;所述内活动环16的外围处设有外防撞环2;所述外防撞环2和内活动环16之间通过连接杆件17固连;所述转动叶片3的外侧端未伸出外防撞环2的外边缘;所述外防撞环2和内活动环16均位于第一支撑杆5的上方;所述第二支撑杆20和竖向安装杆19的内部设有贯穿的第一气流通道18;所述第一气流通道18的两端分别与滑动空腔21的内部、第二橡胶圆筒30的内部连通;所述无人机机身1的底部固定设有支撑构件;所述支撑构件由两组向外倾斜的支撑腿7和水平支撑板8构成;所述水平支撑板8固定安装在两组所述支撑腿7的底端;
30.工作时,本发明通过设置超出转动叶片3外边缘的外防撞环2,进而避免无人机在飞行的过程中转动叶片3撞向障碍物,如电线杆、树干等而停止运转,从而可避免由于转动叶片3停止运转而导致的无人机坠落的现象发生,同时本发明中的第二支撑杆20可收缩在第一支撑杆5上的滑动空腔21内,进而可减小无人机的整体体积,便于收纳;
31.在实际使用时,由于转动叶片3的外侧端未伸出外防撞环2的外侧壁边缘,进而当无人机由于操作不当而撞向硬质障碍物时,不会阻碍转动叶片3的旋转,操作者可以通过遥控器继续控制无人机进而使其向远离障碍物的方向移动,避免发生无人机坠落的现象;同时当无人机的转动叶片3撞向软质障碍物时,如较细的树枝或者高速路上软质广告牌等等,此时外防撞环2可防止转动叶片3与软质障碍物接触,进而可避免软质障碍物发生损坏;
32.当无人机使用完以后需要装上车时,此时可将第一支撑杆5和第二支撑杆20翻转至竖直状态,此时外防撞环2可与地面接触可作为滚轮使用,进而便于将无人机移动至车辆停靠的位置,当需要将无人机搬上车时,此时可将无人机的无人机机身1向下按压,此时第二支撑杆20将会收缩在滑动空腔21的内部,此时无人机的体积将会更小,更加便于收纳;同时,当第二支撑杆20收纳在滑动空腔21的内部时,此时与第二支撑杆20固连的活塞板36将会脱离滑动空腔21外侧端的弧形卡槽23并与滑动空腔21内侧端的弧形卡槽23相互插接,进而将滑动空腔21的位置固定,同时由于活塞板36挤压滑动空腔21内部的气体,滑动空腔21内部的气体将会通过第一气流通道18进入第二橡胶圆筒30的内部,进而使得第二橡胶圆筒30发生膨胀,此时第二橡胶圆筒30将会把内活动环16撑紧,内活动环16不能绕着竖向安装杆19进行转动,进而防止将无人机放在车上时,无人机会在装载车发生晃动时在外防撞环2的作用下移动。
33.作为本发明的一种实施方式,所述外防撞环2的外边缘均匀设有u形杆12;所述u形杆12的两端活动插设在外防撞环2内部的柱状空槽24内;所述u形杆12的两端均通过弹簧与柱状空槽24的内侧端固连;所述u形杆12在外防撞环2的边缘绕外防撞环2的中心轴线呈等距环形排列;工作时,由于位于外防撞环2外边缘处u形杆12通过弹簧与柱状空槽24的内侧端固连,进而当无人机撞向障碍物时,此时障碍物将会首先与u形杆12接触并挤压u形杆12,u形杆12由于与弹簧固连而具有一定的弹性,进而可以起到缓冲的作用,防止外防撞环2被撞变形,同时u形杆12会在弹簧的作用力下反弹,进而使得外防撞环2向远离障碍物的方向移动。
34.作为本发明的一种实施方式,所述u形杆12的竖直杆件上套设有第一橡胶圆筒6;所述第一橡胶圆筒6的两端均设有出气孔13;工作时,第一橡胶圆筒6可以进一步起到缓冲的作用,当障碍物撞向第一橡胶圆筒6时,第一橡胶圆筒6会通过其上的出气孔13缓慢的排气,进而将作用在第一橡胶圆筒6上的力通过排气的方式缓慢的释放掉,最终作用在u形杆12上的力会大大减小,进而起到很好的缓冲效果。
35.作为本发明的一种实施方式,所述第一支撑杆5的上表面开设有水平滑槽15;所述水平滑槽15的内部滑动设有滑动块33;所述滑动块33的上表面与清洁板4的底端固连;所述清洁板4靠近第一橡胶圆筒6的侧面均匀设有清洁刷毛26;工作时,当无人机完成违章巡查工作以后,将第一支撑杆5和第二支撑杆20翻转至竖直方向并将外防撞环2作为滚轮来移动无人机时,此时当位于u形杆12上的第一橡胶圆筒6经过地面再经过清洁板4表面的清洁刷毛26时,清洁刷毛26将会将第一橡胶圆筒6表面的灰尘、小颗粒石子等杂质刷下,进而避免
小颗粒石子粘附在第一橡胶圆筒6的表面造成第一橡胶圆筒6容易被硌破,同时将第一橡胶圆筒6表面的杂质除去可防止装车时污染车厢内部环境。
36.作为本发明的一种实施方式,所述滑动块33与弹簧压缩管14的一端固连,弹簧压缩管14的另一端与水平滑槽15靠近安装板22的一端固连;所述清洁板4的内部开设有分气腔27;所述分气腔27通过滑动块33上的第二气流通道32与弹簧压缩管14的内部连通;所述清洁板4上设有清洁刷毛26的侧面均匀开设有喷气孔29;所述喷气孔29与分气腔27的内部相互连通,且喷气孔29位于清洁刷毛26之间的间隙内;工作时,当无人机移动至装车位置时,此时可将无人机机身1向下按压,使得第二支撑杆20收缩在滑动空腔21的内部,同时外防撞环2边缘的u形杆12也将会将清洁板4向靠近第一支撑杆5内侧端的方向进行移动,此时清洁板4挤压弹簧压缩管14,弹簧压缩管14内部的气体将会通过滑动块33上的第二气流通道32进入分气腔27的内部,并最终从清洁板4上的喷气孔29逸出,进而可将清洁刷毛26上的杂质吹下,起到清理杂质的作用。
37.作为本发明的一种实施方式,所述水平支撑板8上均匀插设有若干组竖向活动杆10;所述竖向活动杆10的顶部均与上挡板11固连;所述竖向活动杆10的底部均与下挡板9固连;所述竖向活动杆10上位于水平支撑板8和下挡板9之间活动套设有弹簧;工作时,当无人机落地时,由于竖向活动杆10具有一定的伸缩能力,进而当无人机即使落在不平整的地面时,此时地面上凸起的部位将会将竖向活动杆10向上顶起,而不会使得整个水平支撑板8发生倾斜,进而使得无人机仍然可以处于相对于地面水平的状态,同时由于竖向活动杆10上套设有弹簧,进而可以起到减震的作用,防止无人机落地时由于操作不当而使得无人机撞击地面导致内部元件损坏。
38.本发明具体工作流程如下:
39.工作时,本发明通过设置超出转动叶片3外边缘的外防撞环2,进而避免无人机在飞行的过程中转动叶片3撞向障碍物,如电线杆、树干等而停止运转,从而可避免由于转动叶片3停止运转而导致的无人机坠落的现象发生,同时本发明中的第二支撑杆20可收缩在第一支撑杆5上的滑动空腔21内,进而可减小无人机的整体体积,便于收纳;
40.在实际使用时,由于转动叶片3的外侧端未伸出外防撞环2的外侧壁边缘,进而当无人机由于操作不当而撞向硬质障碍物时,不会阻碍转动叶片3的旋转,操作者可以通过遥控器继续控制无人机进而使其向远离障碍物的方向移动,避免发生无人机坠落的现象;同时当无人机的转动叶片3撞向软质障碍物时,如较细的树枝或者高速路上软质广告牌等等,此时外防撞环2可防止转动叶片3与软质障碍物接触,进而可避免软质障碍物发生损坏;
41.当无人机使用完以后需要装上车时,此时可将第一支撑杆5和第二支撑杆20翻转至竖直状态,此时外防撞环2可与地面接触可作为滚轮使用,进而便于将无人机移动至车辆停靠的位置,当需要将无人机搬上车时,此时可将无人机的无人机机身1向下按压,此时第二支撑杆20将会收缩在滑动空腔21的内部,此时无人机的体积将会更小,更加便于收纳;同时,当第二支撑杆20收纳在滑动空腔21的内部时,此时与第二支撑杆20固连的活塞板36将会脱离滑动空腔21外侧端的弧形卡槽23并与滑动空腔21内侧端的弧形卡槽23相互插接,进而将滑动空腔21的位置固定,同时由于活塞板36挤压滑动空腔21内部的气体,滑动空腔21内部的气体将会通过第一气流通道18进入第二橡胶圆筒30的内部,进而使得第二橡胶圆筒30发生膨胀,此时第二橡胶圆筒30将会把内活动环16撑紧,内活动环16不能绕着竖向安装
杆19进行转动,进而防止将无人机放在车上时,无人机会在装载车发生晃动时在外防撞环2的作用下移动。
42.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1