一种树障清除装置的制作方法
1.本申请涉及清除装置技术领域,尤其涉及一种树障清除装置。
背景技术:
2.输电线路是电力系统中不可缺少的组成部分,分为架空输电线路和电缆线路。其中,架空输电线路架设在地面之上,由于架空输电线路通常布置在户外空旷地带,遍布漫山遍野,因此容易受到外部环境的影响。
3.高压输电线路常跨越大量的树林和森林,树障是造成输电线路运行故障的主要因素,一旦输电线路导线与树木的距离不足,就容易导致输电线路对树木进行放电,从而造成输电线路跳闸故障或者对地放电引起火灾,进而影响输电线路的正常运行。
4.通常,输电线路的运维人员每一到两月均会对沿线走廊环境进行例行巡视,当发现有树障隐患可能影响输电线路安全运行时,运维人员会对树木进行砍伐或者树枝修剪,其中以树枝或树梢修剪为主。但是人工爬到树上修剪树障费时费力,且存在极大的安全隐患。基于此,亟需一种树障清除装置,用于解决输电线路中树障处理困难的问题,保障输电线路的正常运行。
技术实现要素:
5.为了解决上述问题,本申请提供了一种树障清除装置,以解决输电线路中树障处理困难的问题。
6.为了实现上述目的,本申请通过以下技术方案实现:一种树障清除装置,包括无人机、动力控制装置、连接架和履带锯;
7.所述动力控制装置包括壳体、第一动力机构和控制器,所述控制器和第一动力机构设置在所述壳体的内部,所述第一动力机构与所述控制器连接;
8.所述壳体通过连接架与所述无人机连接;
9.所述第一动力机构设置有第一传动轴,所述第一传动轴与所述履带锯连接。
10.进一步地,所述无人机为多旋翼无人机。
11.进一步地,所述动力控制装置还包括第二动力机构,所述第二动力机构设置有第二传动轴,所述第二传动轴与所述无人机内的动力部件连接,所述第二动力机构与所述控制器连接。
12.进一步地,所述第一动力机构和第二动力机构均为发动机。
13.进一步地,所述履带锯沿锯齿运动方向的中心线与水平线的夹角的角度为20
°‑
45
°
。
14.由以上技术方案可知,本申请提供一种树障清除装置,所述树障清除装置包括无人机、动力控制装置、连接架和履带锯;所述动力控制装置包括壳体、第一动力机构和控制器,所述控制器和第一动力机构设置在所述壳体的内部,所述第一动力机构与所述控制器连接;所述壳体通过连接架与所述无人机连接;所述动力机构设置有第一传动轴,所述第一
传动轴与所述履带锯连接。本申请实施例将履带锯与无人机结合,可以清除无人机作业时周围的树障,提高无人机的作业效率,同时无需运维人员上树,更好的保护了运维人员的人身安全。
附图说明
15.为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
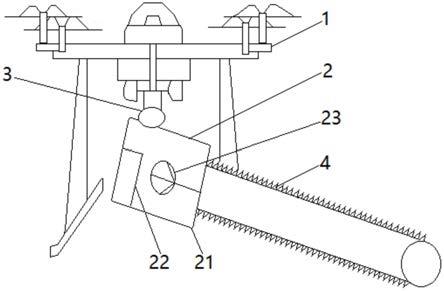
16.图1为本申请实施例中一种树障清除装置的主视图。
17.图中,1
‑
无人机、2
‑
动力控制装置、21
‑
壳体、22
‑
第一动力机构、23
‑
控制器、3
‑ꢀ
连接架、4
‑
履带锯。
具体实施方式
18.为使本申请实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本申请。
19.本申请实施例提供一种树障清除装置,请参阅图1,一种树障清除装置,包括无人机1、动力控制装置2、连接架3和履带锯4,所述树障清除装置可实现对输电线路通道中树障的快速清除。无人机采用无线电遥控设备和自备的程序控制装置操纵,或者由车载计算机完全地或间歇地自主地操作,无人机往往更适合那些危险的任务,而且无人机上具有监控设备,可以使运维人员在地面就能时刻观察空中情况,保证操作过程的可控性。
20.所述动力控制装置2包括壳体21、第一动力机构22和控制器23,所述控制器23和第一动力机构22设置在所述壳体21的内部,所述第一动力机构22与所述控制器23连接;所述控制器23可以控制第一发动机的启动。
21.所述壳体21通过连接架3与所述无人机1连接,所述连接架3将壳体21固定于无人机1的机身底部。
22.所述第一动力机构22设置有第一传动轴,所述第一传动轴与所述履带锯4连接。所述履带锯4还与所述控制器23连接,所述控制器可以控制履带锯反向切割,以及控制履带锯的速度,防止锯带在转动工作时被树枝卡住。传动轴能实现两轴的等角速传动,通过带动齿轮运转,将第一动力机构22中发动机的动力传递给所述履带锯4,使所述履带锯4产生驱动力。
23.在一些实施例中,所述无人机1为多旋翼无人机,多旋翼无人机是一种具有三个及以上旋翼轴的特殊的旋翼飞行器。通过每个轴上的电动机转动,带动旋翼,从而产生升推力。不同于一般直升机,多旋翼无人机的旋翼总距固定,通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹。多旋翼无人机操控性强,能够垂直起降和悬停,适用于低空、低速、有垂直起降和悬停要求的任务类型,可用于清除树障作业。
24.在一些实施例中,所述动力控制装置2还包括第二动力机构,所述第二动力机构设置有第二传动轴,所述第二传动轴与所述无人机1内的动力部件连接,所述第二动力机构与所述控制器23连接,控制器可以控制第二发动机的启动。所述第二动力机构为所述无人机1
提供动力,采用汽油作为动力源,解决了传统无人机续航能力不足的问题。
25.在一些实施例中,所述第一动力机构22和第二动力机构均为发动机。燃油式发动机重量轻,动力相对功率大,结构简单,坚固可靠耐用,易修理,从而成为伐木工作中动力的首选。
26.在一些实施例中,所述履带锯4沿锯齿运动方向的中心线与水平线的夹角的角度为 20
°‑
45
°
,便于整套所述树障清除装置进入作业位置时从树障的侧上方进入,防止被树枝牵绊。
27.作业时,首先,在地面检查整体所述树障清除装置的状态,并试飞。扫视无人机1 的机身外观,观察机身是否有损坏,特别注意观察机身各螺丝连接处是否有裂纹,各部件螺丝是否紧固。用手转动每支螺旋桨,检查每支桨叶安装是否正确,观察桨叶与电机之间是否出现相对位移,观察每个电机的安装螺丝是否松动。检查飞机各处接线是否出现断裂,松动,崩脱,在起飞之前还要检查飞机各电机转向是否正确。正式起飞之前观察周围环境是否允许起飞,周边是否有人员围观,确保周围环境是安全的。
28.检查连接架3的各个连接处是否牢固,不能存在松动情况,否则作业时震动状态下容易引发设备零件脱落。检查履带锯4锯带的张紧度,此时一定要关闭发动机,戴上保护手套,张紧度适宜的情况是当锯带挂在导板下部时,用手可以拉动锯带,锯带上必须总有少许油溅出。检查锯带润滑和润滑油箱的油位,如果锯带在干燥的情况下工作,会导致切割装置损毁,而且旧机油不适用于锯带润滑。如果油箱中的油位不降低,可能是润滑油输送出现故障,应检查锯带润滑油的油路。
29.其次,根据预清除树枝的位置,调整连接架3的连接角度,使履带锯4下倾,与水平夹角约20
°
至45
°
,便于整套所述树障清除装置进入作业位置时从树障的侧上方进入,防止被树枝牵绊。
30.然后,操控所述无人机1到达合适的作业位置。即使是无风环境,上空的环境也与地面不同,遇到风时,要迅速调整所述无人机1的方向,将机头位置迎向风,这样就能尽量抵消风力的影响,避免所述无人机1发生侧翻情况。
31.最后,启动履带锯4,锯断障碍树枝,作业完成后返回地面。当所述无人机1到达输电线路高空树障作业位置时,启动第一发动机,所述履带锯4开始工作,清除树障。在每次飞行前要设置好返航的高度,避免所述无人机1在自动返航时撞到障碍物。锯带在工作后一定要放松,锯带会在冷却时收缩,如果锯带是在工作状态下被张紧,那么冷却时锯带就会收缩过紧,会损坏所述履带锯4。
32.由以上技术方案可知,本申请提供一种树障清除装置,所述树障清除装置包括无人机、动力控制装置、连接架和履带锯;所述动力控制装置包括壳体、第一动力机构和控制器,所述控制器和第一动力机构设置在所述壳体的内部,所述第一动力机构与所述控制器连接;所述壳体通过连接架与所述无人机连接;所述动力机构设置有第一传动轴,所述第一传动轴与所述履带锯连接。本申请实施例将履带锯与无人机结合,可以清除无人机作业时周围的树障,提高无人机的作业效率,同时无需运维人员上树,更好的保护了运维人员的人身安全。
33.以上对本申请的实施例进行了详细说明,但所述内容仅为本申请的较佳实施例,不能被认为用于限定本申请的实施范围。凡依本申请范围所作的均等变化与改进等,均应
仍属于本申请的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1