一种高稳定图像采集无人机的制作方法
1.本实用新型涉及图像采集技术领域,尤其涉及一种高稳定图像采集无人机。
背景技术:
2.无人机采集是传统航空摄影测量手段的有力补充,随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等,市场上现有的无人机采集采大多用timesync系统。
3.目前,现有的图像采集无人机,大多存在以下的不足:位置信息与相机的时间总是产生误差,不能满足人们的要求,综上,现有的图像采集无人机大多还不能很好地契合实际需要,所以急需一种高稳定图像采集无人机。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种高稳定图像采集无人机。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种高稳定图像采集无人机,包括壳体、timesync系统芯片、gnss系统芯片和遥控器,timesync系统芯片和gnss系统芯片安装在壳体的内部,所述 timesync系统芯片包括ptk模块,所述壳体的下表面通过螺栓固定有第一电机,且壳体的下表面通过螺栓固定有连接块,所述连接块的一侧通过螺栓固定有第二电机,且第一电机和第二电机的一侧通过螺栓固定有摄像机,摄像机的一侧嵌接有镜头。
7.优选的,所述壳体的上表面通过螺栓固定有多个动力电机,动力电机的一侧通过螺栓固定有安装头,安装头的一侧均通过螺栓固定有桨叶。
8.优选的,所述壳体的上表面通过螺栓固定有保护壳,且保护壳位于动力电机的外部。
9.优选的,所述壳体的下表面通过螺栓固定有两个支撑架,支撑架的两侧均通过螺栓固定有缓冲杆。
10.优选的,所述支撑架的两侧均通过螺栓固定有缓冲块。
11.优选的,所述壳体的下表面通过螺栓固定有led灯管,led灯管内安装有led 灯。
12.优选的,所述壳体的上表面通过螺栓固定处理器盒,处理器盒内安装有处理器,且处理器与timesync系统芯片通过信号线连接。
13.本实用新型的有益效果为:
14.1.通过timesync系统芯片和ptk模块的设置能够将摄像机与rtk的时钟系统保持微秒级同步,在rtk精准定位的同时,对相机镜头中心点位置和天线中心点位置进行补偿,减少位置信息与相机的时间误差,为影像提供更加精确的位置信息,满足高精度航测需求。
15.2.通过gnss系统芯片采用实时差分定位技术,gps/北斗/glonass3系统6 频点rtk为飞行器提供厘米级定位,备用高灵敏度gnss系统,保障在弱信号下仍能稳定飞行,作业更加灵活高效。
16.3.通过遥控器采用ocusync高清数字图传技术,使传输稳定可靠,控制距离远达7公里,适用于大面积测绘作业,提高了装置的适用性。
附图说明
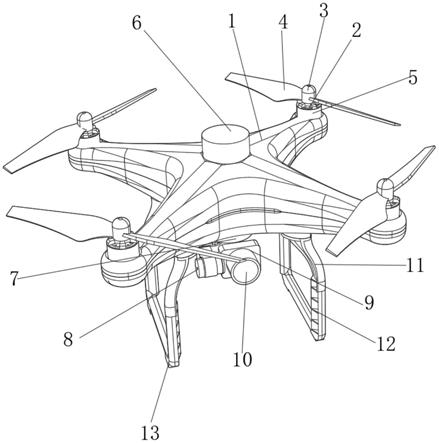
17.图1为本实用新型提出的一种高稳定图像采集无人机的立体结构示意图;
18.图2为本实用新型提出的一种高稳定图像采集无人机的仰视结构示意图;
19.图3为本实用新型提出的一种高稳定图像采集无人机的系统流程图结构示意图。
20.图中:1、壳体;2、动力电机;3、安装头;4、桨叶;5、保护壳;6、处理器盒;7、第一电机;8、第二电机;9、摄像机;10、镜头;11、支撑架;12、缓冲杆;13、缓冲块;14、led灯;15、连接块。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图1
‑
3,一种高稳定图像采集无人机,包括壳体1、timesync系统芯片、 gnss系统芯片和遥控器,timesync系统芯片、gnss系统芯片安装在壳体1的内部,timesync系统芯片和gnss系统芯片通过信号线连接,timesync系统芯片包括ptk模块,壳体1的下表面通过螺栓固定有第一电机7,且壳体1的下表面通过螺栓固定有连接块15,连接块15的一侧通过螺栓固定有第二电机8,且第一电机7和第二电机8的一侧通过螺栓固定有摄像机9,通过摄像机9完成无人机的飞行航拍,摄像机9的一侧嵌接有镜头10,在rtk精准定位的同时,对相机镜头10中心点位置和天线中心点位置进行补偿,减少位置信息与相机的时间误差。
23.本实用新型中,壳体1的上表面通过螺栓固定有多个动力电机2,动力电机 2的一侧通过螺栓固定有安装头3,安装头3的一侧均通过螺栓固定有桨叶4,动力电机2给桨叶4提供动力,壳体1的上表面通过螺栓固定有保护壳5,保护壳5对动力电机2起到防护的作用,且保护壳5位于动力电机2的外部,壳体1 的下表面通过螺栓固定有两个支撑架11,支撑架11在无人机未飞行的状态下方便放置,支撑架11的两侧均通过螺栓固定有缓冲杆12,支撑架11的两侧均通过螺栓固定有缓冲块13,缓冲杆12和缓冲块13在无人机下降时起到缓冲的作用。
24.需要进一步说明的是,壳体1的下表面通过螺栓固定有led灯管,led灯管内安装有led灯14,在夜晚无人机飞行时通过led灯14方便观察无人机的位置,壳体1的上表面通过螺栓固定处理器盒6,处理器盒6内安装有处理器,处理器的型号为arm9tdmi,且处理器与timesync系统芯片通过信号线连接,无人机航拍的图片通过处理器进行数据处理分析。
25.工作原理:使用时,通过遥控器来启动无人飞机,在动力电机2的转动下带动桨叶4进行转动,从而使得无人机开始飞行,当在信号相对弱时,通过gnss 系统芯片采用实时差分定位技术,gps/北斗/glonass3系统6频点rtk为飞行器提供厘米级定位,备用高灵敏度
gnss系统,保障在弱信号下仍然可以使得无人机能稳定飞行,同时无人机在飞行到一定的时候需要进行拍摄时,通过遥控器来控制摄像机9,第一电机7和第二电机8给摄像机9提供电力,通过timesync 系统芯片和ptk模块保证将摄像机9与rtk的时钟系统保持微秒级同步,在rtk 精准定位的同时,对相机镜头10中心点位置和天线中心点位置进行补偿,减少位置信息与相机的时间误差,为影像提供更加精确的位置信息,从而使得拍摄的照片无时间误差,通过摄像机9拍摄的图片通过处理器进行数据分析处理,由于遥控器本身采用ocusync高清数字图传,处理器将处理后的照片直接传输给遥控器,通过遥控器便可以观察航拍的图片。
26.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
27.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1