一种用于太阳能飞行器的尾轮随动机构的制作方法
1.本实用新型涉及太阳能飞行器起落架领域,尤其涉及一种太阳能飞行器的尾轮随动机构。
背景技术:
2.目前太阳能飞行器起落架大多不具备转向功能,因此为保证太阳能飞行器在滑跑和降落过程中不冲出跑道,对于飞行控制和场地提出了极高的要求;同时传统航空飞行器常用的起落架主动转向机构,需要配备液压或电机系统进行转向驱动,存在结构重量大、制造成本高、安装修理较为复杂等问题。由于太阳能飞行器需进行超长航时飞行,对结构重量要求极其苛刻,现有的起落架转向机构很难满足太阳能飞行器的实际使用要求,因此本实用新型采用随动机构,利用方向舵面偏转带动尾轮实现转向功能。
3.该尾轮随动机构主要用于太阳能飞行器的的内场转移、地面滑跑、起飞、降落等的转向任务,具有结构形式简单、重量低、可靠性高、维护修理便捷和成本低廉的特点。
技术实现要素:
4.本实用新型解决的技术问题是:相比于现有技术,提供了一种用于太阳能飞行器的尾轮随动机构,该具有尾轮随舵面转动的功能,可通过控制舵面角度对尾轮转向进行调整,可使太阳能飞行器具有自主转弯能力,可独立完成太阳能飞行器的内场转移、地面滑跑、起飞、降落等转弯任务。
5.本实用新型目的通过以下技术方案予以实现:一种用于太阳能飞行器的尾轮随动机构,包括:加长轮轴、第一锁紧结构、第二锁紧结构、第一拉线、第二拉线、随动垫块、随动转向轴、舵梁和尾轮;其中,所述加长轮轴安装在所述尾轮之上;所述第一锁紧结构和所述第二锁紧结构将所述加长轮轴和所述尾轮连接在一起;所述尾轮位于垂尾主梁下方;所述随动转向轴穿过所述随动垫块,并安装在所述随动垫块下部;所述随动垫块安装在所述舵梁下方;所述第一拉线连接所述加长轮轴的一端和所述随动转向轴的一端;所述第二拉线连接所述加长轮轴的另一端和所述随动转向轴的另一端。
6.上述用于太阳能飞行器的尾轮随动机构中,所述加长轮轴采用铝合金材料,且分为三段,分别为第一螺纹段、轮轴段和第二螺纹段。
7.上述用于太阳能飞行器的尾轮随动机构中,所述第一螺纹段为m4
‑
m6外螺纹,其端部开有通孔,通孔直径范围为2mm
‑
4mm。
8.上述用于太阳能飞行器的尾轮随动机构中,所述轮轴段为直径范围是4mm
‑
6mm的圆杆。
9.上述用于太阳能飞行器的尾轮随动机构中,所述第二螺纹段为m4
‑
m6外螺纹,其端部开有通孔,通孔直径范围为2mm
‑
4mm。
10.上述用于太阳能飞行器的尾轮随动机构中,所述第一锁紧结构和第二锁紧结构采用标准件,均由m4
‑
m6的自锁螺母和直径为4mm
‑
6mm的圆形垫片组成。
11.上述用于太阳能飞行器的尾轮随动机构中,所述第一拉线和所述第二拉线采用伸长量较小的材料,且保证两者关于垂尾中面对称。
12.上述用于太阳能飞行器的尾轮随动机构中,所述随动垫块采用轻质高强塑料材料,为降低重量采用环形结构,两侧开有通孔。
13.上述用于太阳能飞行器的尾轮随动机构中,所述随动转向轴采用铝合金材料,与所述通孔用环氧胶粘接,并使两端露出的所述随动转向轴长度相等。
14.上述用于太阳能飞行器的尾轮随动机构中,当舵面围绕舵面旋转中心转动一定角度时,所述随动转向轴一端(或另一端)通过所述第一拉线(或所述第二拉线)拉动加长轮轴一端(或另一端),带动所述尾轮围绕尾轮旋转中心同时转动一定角度。
15.上述用于太阳能飞行器的尾轮随动机构中,通过调整所述加长轮轴和所述随动转向轴长度,可实现不同的随动比。
16.本实用新型与现有技术相比,具有如下优点:
17.(1)本实用新型通过将加长轮轴、第一锁紧结构、第二锁紧结构、第一拉线、第二拉线、随动垫块、随动转向轴、舵梁和尾轮构成整体,通过控制舵面角度对尾轮转向进行调整,具有尾轮随舵面转动的功能,可通过控制舵面角度对尾轮转向进行调整,可使太阳能飞行器具有自主转弯能力,可独立完成太阳能飞行器的内场转移、地面滑跑、起飞、降落等转弯任务。本实用新型具有成本低廉、重量轻、可靠性高、使用维护便捷等特点。
18.(2)本实用新型借用太阳能飞行器上的原有的尾轮和舵梁结构进行改进设计,结构形式简单、重量低、可靠性高、维护修理便捷和成本低廉的特点。
19.(3)本实用新型可通过调整加长轮轴和随动转向轴的长度,实现不同的随动比。
20.(4)本实用新型在舵面偏转5
°
至20
°
范围内(舵面实际偏转范围),随动比接近线性。
附图说明
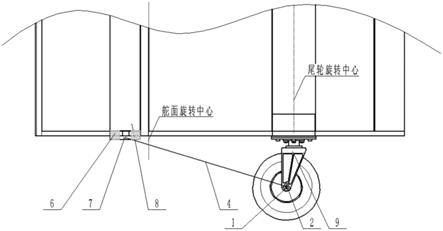
21.图1示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构示意图;
22.图2示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构仰视示意图;
23.图3示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,加长轮轴示意图;
24.图4示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,随动垫块示意图;
25.图5示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,随动转向轴示意图;
26.图6示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,在一定条件下的尾轮随动比曲线及线性度。
具体实施方式
27.下面结合附图对本实用新型作进一步详细说明:
28.图1示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构示意图。
图2示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构仰视示意图。如图1和图2所示,该随动机构包括:加长轮轴1、第一锁紧结构2、第二锁紧结构3、第一拉线4、第二拉线5、随动垫块6、随动转向轴7、舵梁8和尾轮9。其中,
29.尾轮9安装在加长轮轴1之上。第一锁紧结构2和所述第二锁紧结构3将加长轮轴1和尾轮9连接在一起。具体的,第一锁紧结构安装于加长轮轴的一端,并紧靠尾轮一侧;第二锁紧结构安装于加长轮轴的另一端,并紧靠尾轮另一侧。
30.尾轮9安装在垂尾下方。具体的,尾轮9上的套筒与垂尾主梁下方内侧通过环氧胶粘接在一起。
31.随动转向轴7穿过随动垫块上的通孔并位于随动垫块的下部。具体的,随动转向轴与随动垫块通过环氧胶粘接在一起,并保证两侧随动转向轴长度相等。
32.随动垫块6安装在舵梁下方。具体的,随动垫块与舵梁8下方内侧通过环氧胶粘接在一起,并保证随动转向轴与加长轮轴平行。
33.第一拉线4连接加长轮轴的一端和随动转向轴的一端。具体的,第一拉线一端与加长轮轴一端的孔连接,另一端与随动转向轴同侧的孔连接;
34.第二拉线5连接加长轮轴的另一端和随动转向轴的另一端。具体的,第一拉线一端与加长轮轴一端的孔连接,另一端与随动转向轴同侧的孔连接,并保证第一拉线和第二拉线长度相等。加长轮轴两侧通过安装在其上的螺母对第一拉线和第二拉线进行限位。
35.图3示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,加长轮轴示意图。由于尾轮载荷较小,加长轮轴采用铝合金材料,可有效降低结构重量,同时其由三段组成,分别为第一螺纹段12、轮轴段13和第二螺纹段14。其中,第一螺纹段和第二螺纹段均为m4
‑
m6外螺纹,并在端部开有通孔11、15,为第一拉线和第二拉线的连接接口,通孔直径范围为2mm
‑
4mm。
36.上述实施中,第一锁紧结构和第二锁紧结构均由m4
‑
m6的自锁螺母和直径为4mm
‑
6mm的圆形垫片组成。
37.上述实施中,第一拉线和第二拉线采用伸长量较小的材料,且保证两者关于垂尾中面对称,本实施例中采用的是聚乙烯拉线。
38.图4示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,随动垫块示意图。随动垫块6采用轻质高强塑料材料,为降低重量采用环形结构,两侧开有通孔61、62,本实施例中采用的是peek材料。具体的,两侧通孔关于垂尾中面对称。
39.图5示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,随动转向轴示意图。随动转向轴7采用铝合金材料,两侧开第一拉线和第二拉线的穿过通孔71/72,随动转向轴与随动垫块两侧通孔用环氧胶粘接,并使两端露出的随动转向轴长度相等。具体的,随动转向轴穿过并用环氧胶与随动垫块两侧通孔61/62粘接。
40.上述实施中,当舵面围绕舵面旋转中心转动一定角度时,所述随动转向轴7一端通过所述第一拉线4(或所述第二拉线5)拉动加长轮轴1一端,带动所述尾轮9围绕尾轮旋转中心同时转动一定角度。具体的,转动过程中,一侧拉线处于绷紧状态,另一侧拉线略有松弛。
41.上述实施中,可通过调整所述加长轮轴和所述随动转向轴7,实现不同的尾轮转动随动比。
42.图6示出了本实用新型实施例提供的用于太阳能飞行器的尾轮随动机构中,在一
定条件下的尾轮随动比曲线及线性度。本实施例中,加长轮轴长度为300mm,随动转向轴长度为200mm,垂尾主梁中心距离舵梁中心距离为750mm,此时在舵面偏转5
°
至20
°
时,尾轮随动比为0.6178,表征线性度的r2值达到了0.9995,非常接近线性。
43.本实用新型的机构具有尾轮随舵面转动的功能,可通过控制舵面角度对尾轮转向进行调整,可使太阳能飞行器具有自主转弯能力,可独立完成太阳能飞行器的内场转移、地面滑跑、起飞、降落等转弯任务。本实用新型具有成本低廉、重量轻、可靠性高、使用维护便捷等特点。
44.以上所述的实施例只是本实用新型较优选的具体实施方式,本领域的技术人员在本实用新型技术方案范围内进行的通常变化和替换都应包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1