一种无人机防撞装置的制作方法
1.本实用新型属于无人机技术领域,涉及到一种无人机防撞装置。
背景技术:
2.现有无人机结构上多为中心支点,悬臂结构,机翼直接安装在伸出的悬臂上。存在以下缺陷:
3.1.因无人机使用过程中存在自身震动,加速对自身结构、电器元件、线路接头等的损害,缩短使用寿命。
4.2.传统无人机机翼直接安装在伸出的悬臂上,无人机启动时,机翼高速旋转,产生视差,会影响操作人员对无人机工作范围的误判,存在安全隐患。
5.3.无人机飞行过程中因风向、风力的影响,也可能导致无人机撞向高耸的建筑、高压线、树木等,损害机翼,造成飞行事故。
6.现有的无人机在外侧安装的防撞环,防止无人机受到外部的压力,从而造成损坏。但是现有的防撞环结构简单,无法调节防撞环的在无人机的位置,使无人机通过防撞环保护的范围过小。
技术实现要素:
7.为解决上述问题,本实用新型一种无人机防撞装置,该装置可增加无人机外部的结构强度,辅助工作人员判断,同时保护机翼,避免受到外物的破坏,同时还能够根据需求,调节防撞环在无人机外侧的位置,提高无人机安全性。
8.本实用新型提供一种无人机防撞装置,该装置包括圆环结构的防撞端和固定端,所述固定端安装在无人机的底部,固定端内安装控制器和控制装置,所述控制装置上安装了多根连接支架,该连接支架与安装在无人机外侧的防撞端相连,所述防撞端上具有多个安装孔,该安装孔内具有调节装置,该调节装置与连接支架相连。
9.进一步的所述控制装置包括圆形结构的外壳和固定杆体,所述固定杆体安装在外壳的内部,固定杆体的侧面具有转动纹理,固定杆体上下两端安装了限位开关,所述固定杆体上安装了电磁转动装置,该电磁转动装置与控制器相连,使控制器能够自动控制电磁转动装置在固定杆体侧面的转动纹理上转动,所述电磁转动装置的外侧具有转动端,该转动端与连接支架进行活动连接,所述外壳的侧面具有固定孔,固定孔上安装了固定杆。
10.进一步的所述电磁转动装置包括控制端,所述控制端通过连接线与控制器相连,使控制器能够自动控制电磁转动装置在固定杆体内上下移动。
11.进一步的所述限位开关包括触点和固定部分,所述固定部分安装在固定杆体上,触点安装在固定部分的侧面,所述触点的两端通过连接线与控制器相连,使控制器能够接收到限位开关闭合的信号。
12.进一步的所述安装孔的内侧具有凹槽,该凹槽为圆弧结构,能够使调节装置在凹槽内转动。
13.进一步的所述调节装置包括球状结构,安装在防撞端的安装孔内,该球状结构内具有通孔,该通孔内安装了连接支架,使连接支架在通孔移动。
14.进一步的所述连接支架底部活动安装在电磁转动装置的转动端上,连接支架侧面安装在外壳侧面的固定孔内,其中连接支架的侧面具有长条状的凹槽孔,该凹槽孔安装在外壳的固定杆上,使连接支架在固定孔内来回移动,连接支架的另一端穿过防撞端中调节装置内的通孔,使连接支架与防撞端与进行活动连接。
15.进一步的所述控制器包括控制芯片、数字量输出模块和数字量输入模块,所述控制芯片与数字量输出模块和数字量输入模块相连,同时控制芯片与无人机的控制系统相连,使无人机远程遥控装置能够远程操作控制器,所述数字量输出模块与电磁转动装置相连,所述数字量输入模块与限位开关的触点相连。
附图说明
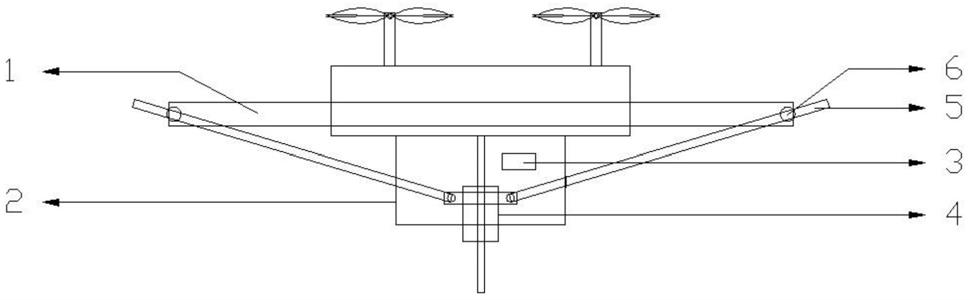
16.图1为实用新型一种无人机防撞装置整体结构示意图;
17.图2为实用新型一种无人机防撞装置的固定端结构示意图;
18.图3为实用新型一种无人机防撞装置的固定端中外壳固定孔和连接支架安装示意图;
19.图4为实用新型一种无人机防撞装置的调节装置安装结构示意图;
20.图5为实用新型一种无人机防撞装置的连接支架结构示意图。
21.图中:1、防撞端;2、固定端;3、控制器;4、控制装置;5、连接支架;6、调节装置; 7、外壳;8、固定杆体;9、电磁转动装置;10、转动端;11、限位开关。
具体实施方式
22.下面结合附图对实用新型一种无人机防撞装置的具体实施方式做详细阐述。
23.如图1和2所示,本实用新型提供了一种无人机防撞装置,该装置包括圆环结构的防撞端1和固定端2,所述固定端2安装在无人机的底部,固定端2内安装控制器3和控制装置4,所述控制装置4上安装了多根连接支架5,该连接支架5与安装在无人机外侧的防撞端1相连,所述防撞端1上具有多个安装孔,该安装孔内具有调节装置6,该调节装置6与连接支架5相连。
24.根据上述,其中所述控制装置4包括圆形结构的外壳7和固定杆体8,所述固定杆体8 安装在外壳7的内部,固定杆体8的侧面具有转动纹理,固定杆体8上下两端安装了限位开关11,所述固定杆体8上安装了电磁转动装置9,该电磁转动装置9与控制器3相连,使控制器3能够自动控制电磁转动装置9在固定杆体8侧面的转动纹理上转动,所述电磁转动装置9的外侧具有转动端10,该转动端10与连接支架5进行活动连接,如图3所示,所述外壳7的侧面具有固定孔,固定孔上安装了固定杆。
25.根据上述,其中所述电磁转动装置9包括控制端,所述控制端通过连接线与控制器3相连,使控制器3能够自动控制电磁转动装置9在固定杆体8内上下移动。
26.根据上述,其中所述限位开关11包括触点和固定部分,所述固定部分安装在固定杆体8 上,触点安装在固定部分的侧面,所述触点的两端通过连接线与控制器3相连,使控制器3 能够接收到限位开关11闭合的信号。
27.根据上述,其中所述安装孔的内侧具有凹槽,该凹槽为圆弧结构,能够使调节装置6在凹槽内转动。
28.如图4所示,所述调节装置6包括球状结构,安装在防撞端1的安装孔内,该球状结构内具有通孔,该通孔内安装了连接支架5,使连接支架5在通孔移动。
29.如图5所示,所述连接支架5底部活动安装在电磁转动装置9的转动端10上,连接支架 5侧面安装在外壳7侧面的固定孔内,其中连接支架5的侧面具有长条状的凹槽孔,该凹槽孔安装在外壳7的固定杆上,使连接支架5在固定孔内来回移动,连接支架5的另一端穿过防撞端1中调节装置6内的通孔,使连接支架5与防撞端1与进行活动连接。
30.根据上述,其中的所述控制器3包括控制芯片、数字量输出模块和数字量输入模块,所述控制芯片与数字量输出模块和数字量输入模块相连,同时控制芯片与无人机的控制系统相连,使无人机远程遥控装置能够远程操作控制器3,所述数字量输出模块与电磁转动装置9 相连,所述数字量输入模块与限位开关11的触点相连。
31.一种无人机防撞装置的工作原理如下:用远程遥控装置控制无人机飞行,在飞行过程中,无人机可能会受到上下左右各个位置外部物体的接触,通过远程遥控装置对无人机内的控制器3进行操作。通过控制器3运行电磁转动装置9,电磁转动装置9在固定杆体8的侧面转动,在转动的过程中,安装在电磁转动装置9侧面的转动端10便在固定杆体8侧面上下移动,使连接支架5在外壳7的固定孔内上下移动,在连接支架5上下移动过程中,防撞端1便随着连接支架5上下移动,从而调节防撞端1在无人机侧面的位置,使无人机的上下两端均受到保护。为了控制防撞端1在无人机侧面的活动区域,在固定杆体8的上下两侧安装了限位开关11,当电磁转动装置9在移动过程中触碰到了限位开关11,控制器3停止电磁转动装置 9运行。可以根据实际需求,调节限位开关11在固定杆体8的位置,从而控制防撞端1在无人机侧面运动范围。
32.最后应该说明的是,结合上述实施例仅说明本实用新型的技术方案而非对其限制。所属领域的普通技术人员应当理解到,本领域技术人员可以对本实用新型的具体实施方式进行修改或者等同替换,但这些修改或变更均在申请待批的权利要求保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1