一种升降舵模块测试台的制作方法
1.本实用新型涉及航空飞行控制,具体涉及一种升降舵模块测试台。
背景技术:
2.升降舵模块测试台的功能是为了满足251523880-0302升降舵模块的整机性能测试需求。目前的测试台只有国外oem品牌的,但是由于oem的测试设备价格昂贵,对整体的成本影响很大,国内也没有替代的测试设备,无法满足测试装置的测试要求。
3.为了解决上述问题,我们做出了一系列改进。
技术实现要素:
4.本实用新型的目的在于,提供一种升降舵模块测试台,以克服现有技术所存在的上述缺点和不足。
5.一种升降舵模块测试台,包括:测试台台架、测试系统和控制加载系统,所述测试系统和控制加载系统设于测试台台架上部;
6.其中,所述测试系统包括:角度编码器、扭矩传感器、止动装置、传动杆、第一连接轴、第二连接轴、第三连接轴、支架和待测部件放置台,所述角度编码器、扭矩传感器和止动装置通过支架与测试台台架上部连接,所述角度编码器与待测部件放置台一侧连接,所述角度编码器通过传动杆与止动装置连接,所述待测部件放置台与第一连接轴一端连接,所述扭矩传感器通过第二连接轴与止动装置连接,所述扭矩传感器通过第三连接轴与控制加载系统连接。
7.进一步,所述测试台台架为可移动式车架结构,所述测试台台架的材质为钢结构。
8.进一步,所述控制加载系统包括:控制摇杆、减速机、第四连接轴、第一滑轮配重和第二滑轮配重,控制摇杆与减速机连接,减速机与第四连接轴一端连接,所述第四连接轴另一端与第一滑轮配重连接,所述第二滑轮配重与第一连接轴连接。
9.本实用新型的有益效果:
10.本实用新型与传统技术相比,通过增设测试系统,实现很好的填补了在升降舵模块维系领域的空白,摆脱了过去只能依靠国外oem厂家维修的处境。
附图说明:
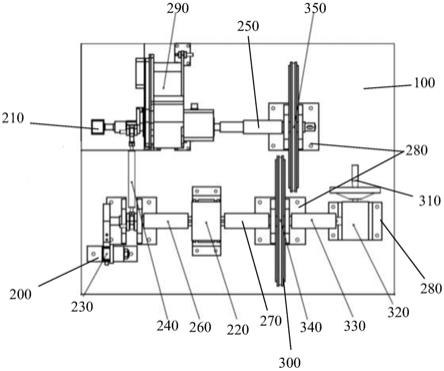
11.图1为本实用新型的结构示意图。
12.附图标记:
13.测试台台架100、测试系统200、角度编码器210、扭矩传感器220、止动装置230、传动杆240、第一连接轴250、第二连接轴260、第三连接轴270、支架280和待测部件放置台290。
14.控制加载系统300、控制摇杆310、减速机320、第四连接轴330、第一滑轮配重340和第二滑轮配重350。
具体实施方式
15.以下结合具体实施例,对本实用新型作进步说明。应理解,以下实施例仅用于说明本实用新型而非用于限定本实用新型的范围。
16.实施例1
17.图1为本实用新型的结构示意图。
18.如图1所示,一种升降舵模块测试台,包括:测试台台架100、测试系统200和控制加载系统300,测试系统200和控制加载系统300设于测试台台架100上部;
19.其中,测试系统200包括:角度编码器210、扭矩传感器220、止动装置230、传动杆240、第一连接轴250、第二连接轴260、第三连接轴270、支架280和待测部件放置台290,角度编码器210、扭矩传感器220和止动装置230通过支架280与测试台台架100上部连接,角度编码器210与待测部件放置台290一侧连接,角度编码器210通过传动杆240与止动装置 230连接,待测部件放置台290与第一连接轴250一端连接,扭矩传感器 220通过第二连接轴260与止动装置230连接,扭矩传感器220通过第三连接轴270与控制加载系统300连接。
20.测试台台架100为可移动式车架结构,测试台台架100的材质为钢结构。
21.控制加载系统300包括:控制摇杆310、减速机320、第四连接轴330、第一滑轮配重340和第二滑轮配重350,控制摇杆310与减速机320连接,减速机320与第四连接轴330一端连接,第四连接轴330另一端与第一滑轮配重340连接,第二滑轮配重350与第一连接轴250连接。
22.本实用新型的工作原理是,设计新型测试台台架100,机械行程测量,将待测组件连接到测试台台架100上,复位角度编码器210,缓慢旋转控制摇杆310,以获取扭矩传感器220上的零读数,拆下组件上的校准销,以大约5s/圈的速率转动控制摇杆310,通过角度编码器210测量组件cw和 ccw的行程范围,他们的范围分别为+41
°
≤cw≤+45
°
,-45
°
≤ccw ≤-41
°
。
23.间隙测量,插入校准销将升降舵模块复位,安装a/p伺服固定工装,拆下校准销,旋转控制摇杆310给组件加载4nm顺时针负载,其通过扭矩传感器220读取力矩值,复位角度编码器210,旋转控制摇杆310给组件加载4nm逆时针负载,此时读取角度编码器210的测量值,测量结果应小于等于0.2
°
。旋转控制摇杆310给组件加载8nm顺时针负载,通过扭矩传感器220读取力矩值,复位角度编码器210,旋转控制摇杆310给组件加载 8nm逆时针负载,此时读取角度编码器210的测量值,测量结果应小于等于0.4
°
。
24.摩擦力和感应力测量,插入校准销将升降舵模块复位,安装a/p伺服模型工装,拆下校准销,以大约5s/圈的速率转动控制摇杆310,分别测量两个方向的参数:通过扭矩传感器220测量启动力矩,范围为2.5-2.9nm,最大有效操作力矩,范围为27.7-33.7nm,5
°
时的摩擦力矩为1.2nm,通过计算算出弹簧硬度范围为0.63-0.77,通过角度编码器210测量启动时的角度偏转为最大0.25
°
。
25.衰减时间测量,将角度编码器210连接到示波器上,设置示波器参数,插入校准销将升降舵模块复位,复位角度编码器210,拆下校准销,旋转控制摇杆310将组件输入轴转动到30
°
,两个方向都测试,并拉下止动装置手柄锁住输入轴,断开控制摇杆310,解锁止动装置,等到输入轴稳定,通过示波器的波形来测量组件的衰减时间,时间小于等于0.34s。
26.rvdt传感器输出特性测试,插入校准销将升降舵模块复位,复位角度编码器210,
拆下校准销,在0
°
,使用角度指示器和外部电源测量rvdt 两个通道的输出角度,转动控制摇杆310将输入轴转动到0.5
°
,通过角度编码器210测量,使用角度指示器和外部电源测量rvdt两个通道的输出角度,转动控制摇杆310将输入轴转动到5
°
,通过角度编码器210测量,并在输出轴滑轮上加载3.1kg,使用角度指示器和外部电源测量rvdt两个通道的输出角度,转动控制摇杆310将输入轴转动到10
°
,通过角度编码器210测量,并在输出轴滑轮上加载4.85kg,使用角度指示器和外部电源测量rvdt两个通道的输出角度,转动控制摇杆310将输入轴转动到20
°
,通过角度编码器210测量,并在输出轴滑轮上加载8.35kg,使用角度指示器和外部电源测量rvdt两个通道的输出角度,转动控制摇杆310将输入轴转动到30
°
,通过角度编码器210测量,并在输出轴滑轮上加载11.85kg,使用角度指示器和外部电源测量rvdt两个通道的输出角度。
27.以上对本实用新型的具体实施方式进行了说明,但本实用新型并不以此为限,只要不脱离本实用新型的宗旨,本实用新型还可以有各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1