多旋翼飞行器机臂结构的制作方法
1.本实用新型涉及无人机设备技术领域,具体涉及一种多旋翼飞行器机臂结构。
背景技术:
2.现有多旋翼无人机在执行飞行项目的过程中,根据飞行项目的需求变换多种飞行姿态,而常规的多旋翼无人机机臂、电机座和螺旋桨组件都是固定安装的,传统通过改变螺旋桨的转速来改变其飞行姿态,常规的fpv穿越机等小轴距的无人机需要瞬间大幅提升螺旋桨的转速并且螺旋桨与机架同步旋转才能完成机身翻滚等机动动作,在机身翻滚过程中会有较大的位移,大载重的多旋翼无人机由于其电机性能及最大载重的限制,仅能进行20度以下的倾转,不能完成大角度翻滚等机动动作,进而无法实现在各种复杂和狭小空间飞行,可操控性较差。
技术实现要素:
3.本实用新型的目的在于改进现有技术的缺陷,提供一种多旋翼飞行器机臂结构。
4.为解决上述技术问题,本实用新型的技术方案如下:
5.多旋翼飞行器机臂结构,包括机架、连接臂、倾转机构及螺旋桨机构,所述机架与连接臂连接,倾转机构包括有旋转轴及用于驱动旋转轴旋转的驱动电机,所述旋转轴具有第一端及第二端,所述第一端与第二端的方向相反,所述第一端安装于驱动电机上,所述第二端与螺旋桨机构转动连接,所述驱动电机安装于机架上。
6.多旋翼飞行器机臂结构,机架通过与连接臂连接支撑螺旋桨机构,倾转机构的驱动电机通过与第一端安装的设置进而驱动旋转轴旋转,旋转轴旋转并通过第二端与螺旋桨机构转动连接的设置带动螺旋桨机构旋转,在执行飞行项目,螺旋桨机构提高转速以维持飞行高度的同时,在倾转机构的作用下螺旋桨机构相对于机架和机臂旋转,使多旋翼无人机在小机动位移幅度的前提下完成大角度翻滚动作。
7.所述倾转机构还包括底座及用于连接安装驱动电机及旋转轴的连接器,所述底座安装于所述机架上,所述驱动电机通过螺栓固定安装于所述底座上。
8.底座安装于机架上的设置,可以用来固定驱动电机,使驱动电机通过底座固定在机架上,以更好地保证驱动电机的运转。
9.所述驱动电机具有半月轴,所述连接器的一端通过螺钉与半月轴固定连接,连接器的另一端通过螺钉与所述第一端固定连接。
10.通过连接器使旋转轴的第一端安装于半月轴上,以用于通过驱动电机的半月轴驱动旋转轴旋转。
11.还包括有用于在第二端与螺旋桨机构的转动连接处封闭旋转轴的堵头,所述堵头套设于所述连接臂上。
12.在本技术方案中,堵头的材质为碳纤材料,堵头的作用用来封闭连接臂,防止外界的水气、灰尘等杂质通过连接臂进入倾转机构。
13.所述机架包括盖板及底板,所述盖板装配于底板上,所述底座通过底板固定安装于所述机架上。
14.通过盖板与底板的组装装配,使连接臂固定安装于机架上。
15.所述堵头的内部设有用于承托旋转轴的轴承,所述轴承套设于所述第二端上。
16.堵头通过套设在连接臂上的方式固定轴承,使轴承稳定地承托着旋转轴,进一步增加了旋转轴在带动螺旋桨机构旋转时的稳定性。
17.所述螺旋桨机构包括第一桨叶及第二桨叶,所述第一桨叶与所述第二桨叶互为正反桨结构,所述螺旋桨机构的数量为至少2个,2个螺旋桨机构之间的位置相对。
18.一正一反的第一桨叶及第二桨叶正好相互抵消反作用扭矩,进一步方便控制多旋翼飞行器原地翻转。
19.所述连接臂的数量为至少2条,所述连接臂的数量与所述螺旋桨机构的数量相对应,相对设置的2个螺旋桨机构之间的距离范围为600毫米至1100毫米。
20.本技术方案的倾转机构及螺旋桨机构的设置能够使600毫米至1000毫米大轴距的多旋翼飞行器实现翻转等多种灵活的机动动作。
21.众所周知,磁罗盘是飞行器正常飞行的前提,而电机工作时产生的磁场很容易对磁罗盘产生不同程度的干扰影响,在600毫米至1000毫米大轴距的多旋翼飞行器翻转时,还可以实现在飞行过程中进行磁罗盘校准,使多旋翼无人机的磁罗盘定位更精准。
22.在旋转轴与螺旋桨机构转动连接的作用下,所述螺旋桨机构相对于所述连接臂转动的角度范围为0度至360度;所述螺旋桨机构的数量为4个或8个。
23.在倾转机构的作用下,螺旋桨机构能够进行0度至180度大范围的旋转,进而使多旋翼无人机在飞行过程中能够进行顺时针及逆时针各旋转90度的大角度翻转动作,本技术方案的螺旋桨机构的数量为8个,8个螺旋桨机构的设置呈“米”字型排列,根据力的运算“米”字型的螺旋桨机构在翻转时更加稳定可靠。
24.与现有技术相比,本实用新型技术方案的有益效果是:
25.相较于现有技术,本实用新型公开的多旋翼飞行器机臂结构能够在驱动电机性能的功率及其最大载重的限制下实现大角度翻滚,以用于完成变换多种飞行姿势,且由于翻滚时小机动位移幅度进一步降低飞行的功耗,进而能够实现在各种复杂和狭小空间飞行,极大地提高了多旋翼飞行器的可操控性,以适用更多复杂的飞行项目需求。
附图说明
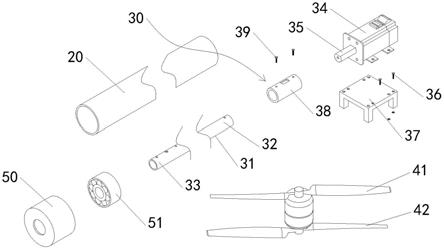
26.图1是本实用新型实施例中倾转机构及螺旋桨机构的爆炸图;
27.图2是本实用新型实施例中倾转机构及螺旋桨机构的剖面图;
28.图3是本实用新型实施例中倾转机构的实体结构示意图;
29.图4是本实用新型实施例中多旋翼飞行器机臂结构的俯视图;
30.图5是本实用新型实施例中多旋翼飞行器机臂结构的水平状态图;
31.图6是本实用新型实施例中多旋翼飞行器机臂结构翻转45度时的状态图;
32.图7是本实用新型实施例中多旋翼飞行器机臂结构翻转90度时的状态图;
33.图8是本实用新型实施例中多旋翼飞行器机臂结构的电控连接图;
34.附图标记说明:
35.10、机架,11、盖板,12、底板,20、连接臂,30、倾转机构,31、旋转轴,32、第一端,33、第二端,34、驱动电机,35、半月轴,36、螺栓,37、底座,38、连接器,39、螺钉,40、螺旋桨机构,41、第一桨叶,42、第二桨叶,50、堵头,51、轴承,60、飞控芯片,61、气压高度计,62、三轴陀螺仪,70、集成电调模块,80、锂电池。
具体实施方式
36.下面对本实用新型的实施例进行详细说明。
37.如图1至3所示,多旋翼飞行器机臂结构,包括机架10、连接臂20、倾转机构30及螺旋桨机构40,机架10与连接臂20连接,倾转机构30包括有旋转轴31及用于驱动旋转轴31旋转的驱动电机34,旋转轴31具有第一端32及第二端33,第一端32与第二端33的方向相反,第一端32安装于驱动电机34上,第二端33与螺旋桨机构40转动连接,驱动电机34安装于机架10上。
38.请继续参阅图1、图2,倾转机构30还包括底座37及用于连接安装驱动电机34及旋转轴31的连接器38,底座37安装于机架10上,驱动电机34通过螺栓36固定安装于底座37上;驱动电机34具有半月轴35,连接器38的一端通过螺钉39与半月轴35固定连接,连接器38的另一端通过螺钉39与第一端32固定连接。
39.请继续参阅图2,机架10包括盖板11及底板12,盖板11装配于底板12上,底座37通过底板12固定安装于机架10上。
40.请继续参阅图2、图3,多旋翼飞行器机臂结构还包括有用于在第二端33与螺旋桨机构40的转动连接处封闭旋转轴31的堵头50,堵头50套设于连接臂20上;堵头50的内部设有用于承托旋转轴31的轴承51,轴承51套设于第二端33上。
41.请参阅图2、图4至图7,螺旋桨机构40包括第一桨叶41及第二桨叶42,第一桨叶41与第二桨叶42互为正反桨结构,螺旋桨机构40的数量为8个,8个螺旋桨机构40之间的位置相对;连接臂20的数量为8条,连接臂20的数量与螺旋桨机构40的数量相对应,相对设置的2个螺旋桨机构40之间的距离范围为600毫米至1100毫米;在旋转轴31与螺旋桨机构40转动连接的作用下,螺旋桨机构40相对于连接臂20转动的角度范围为0度至180度。
42.在本实施例中,如图4所示,8个螺旋桨机构分别以标号40a、40b、40c、40d、40e、40f、40g、40h表示,当多旋翼飞行器开启倾转机身模式时,驱动电机34通电准备工作,请参阅图1、图2、图3、图4,翻转过程如下:
43.请继续参阅图5、图6、图7,螺旋桨机构(40b,40c,40f,40g)提升转速,以保持悬停所需的升力;同时,驱动电机34启动,实时调整螺旋桨机构(40b,40c,40f,40g)相对于机架的角度;螺旋桨机构(40a,40d,40e,40h)的转速降低到怠速状态,在此调整转速及角度的过程中,8个螺旋桨机构的合力保持不变;
44.螺旋桨机构(40a,40h)的第一桨叶41及第二桨叶42的转速缓缓提升转速,使8个螺旋桨机构的合力发生变化,转速提升的同时螺旋桨机构(40a,40h)对应的连接臂20抬升机架10,使机架10开始缓慢倾转;螺旋桨机构(40b,40c,40f,40g)对应连接臂20上的驱动电机34开始调整螺旋桨机构的角度,此过程的升力合力始终保持为零,使机体悬停;
45.当机架缓慢翻转到与水平面垂直后,40a、40h的螺旋桨机构的转速降至变成怠速,螺旋桨机构(40b,40c,40f,40g)为机架提供悬停时所需的全部升力;
46.由于8轴无人机的连接臂20,螺旋桨机构旋转的角度、结构等特性,可以使机架实现顺时针、逆时针各翻转90
°
的悬停动作。
47.在本实施例中,如图8所示,驱动电机34为伺服电机,多旋翼飞行器机臂结构的电控部分包括锂电池80、集成电调模块70、三相电源、飞控芯片60、气压高度计61、三轴陀螺仪62,其中,锂电池80与集成电调模块70电性连接,集成电调模块70与伺服电机三相连接,气压高度计61及三轴陀螺仪62均与飞控芯片60电性连接,飞控芯片60与伺服电机电性连接。气压高度计61及三轴陀螺仪62将各自检测到的数据传输到飞控芯片60,飞控芯片60将控制的编码信号发送至伺服电机,锂电池80与集成电调模块70为伺服电机提供动力源。
48.本实施例具有如下优点:
49.1、多旋翼飞行器机臂结构,机架10通过与连接臂20连接支撑螺旋桨机构40,倾转机构30的驱动电机34通过与第一端32安装的设置进而驱动旋转轴31旋转,旋转轴31旋转并通过第二端33与螺旋桨机构40转动连接的设置带动螺旋桨机构40旋转,在执行飞行项目,螺旋桨机构40提高转速以维持飞行高度的同时,在倾转机构30的作用下螺旋桨机构40相对于机架10和机臂旋转,使多旋翼无人机在小机动位移幅度的前提下完成大角度翻滚动作。
50.本实用新型公开的多旋翼飞行器机臂结构能够在驱动电机34性能的功率及其最大载重的限制下实现大角度翻滚,以用于完成变换多种飞行姿势,且由于翻滚时小机动位移幅度进一步降低飞行的功耗,进而能够实现在各种复杂和狭小空间飞行,极大地提高了多旋翼飞行器的可操控性,以适用更多复杂的飞行项目需求。
51.2、底座37安装于机架10上的设置,可以用来固定驱动电机34,使驱动电机34通过底座37固定在机架10上,以更好地保证驱动电机34的运转。
52.3、通过连接器38使旋转轴31的第一端32安装于半月轴35上,以用于通过驱动电机34的半月轴35驱动旋转轴31旋转。
53.4、在本实施例中,堵头50的材质为碳纤材料,堵头50的作用用来封闭连接臂20,防止外界的水气、灰尘等杂质通过连接臂20进入倾转机构30。
54.5、通过盖板11与底板12的组装装配,使连接臂20固定安装于机架10上。
55.6、堵头50通过套设在连接臂20上的方式固定轴承51,使轴承51稳定地承托着旋转轴31,进一步增加了旋转轴31在带动螺旋桨机构40旋转时的稳定性。
56.7、一正一反的第一桨叶41及第二桨叶42正好相互抵消反作用扭矩,进一步方便控制多旋翼飞行器原地翻转。
57.8、本实施例的倾转机构30及螺旋桨机构40的设置能够使600毫米至1000毫米大轴距的多旋翼飞行器实现翻转等多种灵活的机动动作。
58.众所周知,磁罗盘是飞行器正常飞行的前提,而电机工作时产生的磁场很容易对磁罗盘产生不同程度的干扰影响,在600毫米至1000毫米大轴距的多旋翼飞行器翻转时,还可以实现在飞行过程中进行磁罗盘校准,使多旋翼无人机的磁罗盘定位更精准。
59.9、在倾转机构30的作用下,螺旋桨机构40能够进行0度至180度大范围的旋转,进而使多旋翼无人机在飞行过程中能够进行顺时针及逆时针各旋转90度的大角度翻转动作,本实施例的螺旋桨机构40的数量为8个,8个螺旋桨机构40的设置呈“米”字型排列,根据力的运算“米”字型的螺旋桨机构40在翻转时更加稳定可靠。
60.以上仅为本实用新型的具体实施例,并不以此限定本实用新型的保护范围;在不
违反本实用新型构思的基础上所作的任何替换与改进,均属本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1