一种多旋翼无人机自动回收、释放与充电装置
1.本实用新型涉及无人机回收释放技术领域,特别涉及一种多旋翼无人机自动回收、释放与充电装置。
背景技术:
2.近几年,多旋翼无人机发展迅猛,已广泛应用于娱乐、物流、监测、救援等民用领域和军事领域。而且,相对于固定翼无人机,多旋翼无人机具有更突出的优势,比如体积小、噪音小、隐蔽性好,释放和回收要求场地小,功能模块丰富,控制简单、性价比高,更容易大规模组队等。尤其是在当前5g技术已逐步付诸应用的背景下,大规模无人机群的应用已成为不可阻挡的趋势,成为多旋翼无人机发展的新的潮流。然而,大规模无人机群无法使用人工的方式进行逐个释放、充电和回收,亟需无人机自动回收、充电和释放技术的开发和应用。
3.虽然受先天条件的限制,多旋翼无人机在飞行速度、载重量、续航里程等方面尚有很大的不足,然而将其与移动平台(如车辆或直升机等,可兼作通讯中转站或指挥中心)结合使用将轻易地克服这些不足,极大地拓展应用场景。而无论如何,都必须通过一种装置,保证无人机可以通过移动平台顺利地释放和回收以及携带移动。另外,由于移动平台的位移不确定性及复杂环境下多旋翼无人机飞行状态下不易精确定位,故该装置还必须具有足够的回收容错能力。
技术实现要素:
4.为解决上述技术问题,本实用新型提供了一种多旋翼无人机自动回收、释放与充电装置,以达到结构简单,夹持和释放动作迅速可靠,对无人机定位精度要求低,可作为一个模块整体装卸,在牢固夹持的同时还可为无人机自动充电的目的。
5.为达到上述目的,本实用新型的技术方案如下:
6.一种多旋翼无人机自动回收、释放与充电装置,包括固定于多旋翼无人机顶部的收放杆和固定于回收平台上的收放装置;所述收放杆的杆体上设有充电触点,所述充电触点外的杆体上套有弹性垫层,所述弹性垫层上开设与所述充电触点对应的开孔;
7.所述收放装置包括与回收平台连接的安装架、网体部分、动力传动部分和控制器,所述网体部分包括上网体和下网体,所述上网体通过连接杆连接上方的限位板,所述上网体前端固定连接滚珠丝杠,后端开设导向孔;所述下网体通过支撑杆连接安装架,所述下网体前端固定连接后压板,后端连接导向杆;所述滚珠丝杠穿过后压板,所述导向杆穿过导向孔;所述上网体的每个网格的前端角落设置夹持充电头一,所述下网体的每个网格的后端角落设置夹持充电头二;
8.所述动力传动部分包括电机、自锁传动装置、主动齿轮、从动齿轮和丝杠螺母,所述电机通过自锁传动装置连接主动齿轮,所述主动齿轮与从动齿轮啮合,所述从动齿轮与丝杠螺母固定连接,所述丝杠螺母位于滚珠丝杠上,所述丝杠螺母的前后两侧分别安装前推力轴承和后推力轴承,所述前推力轴承连接前压板,所述后推力轴承连接所述后压板,前
压板和后压板之间通过螺栓固定连接。
9.上述方案中,所述自锁传动装置为单向自锁传动装置或双向自锁传动装置。
10.进一步的,所述双向自锁传动装置包括主动轴、从动轴和固定环,所述主动轴与所述电机轴连接,所述从动轴与主动齿轮连接,所述固定环通过安装座固定在安装架上;所述主动轴和固定环之间设置主动轴轴承,所述从动轴和固定环之间设置从动轴轴承,所述主动轴和从动轴之间连接扭转弹簧;
11.所述主动轴包括输入端和与从动轴相配合的主动配合端,所述主动配合端设有中空腔,所述中空腔内沿径向相对设置两个扇形块,所述中空腔内一侧端面上位于扇形块之间设置两个轴销一;
12.所述从动轴包括输出端和与主动轴相配合的从动配合端,所述从动配合端的端面上开设用于容纳所述主动配合端的圆柱盲孔,所述从动配合端的侧面开设一对与所述圆柱盲孔相通的方孔一,所述圆柱盲孔的开口端面上还设有与方孔一相通的一对楔形槽;
13.每个所述方孔一内均活动设置一个止动杆,两个止动杆之间连接压缩弹簧,所述止动杆上设置销轴二,相邻的销轴一和销轴二之间设置连接部件,所述止动杆、压缩弹簧和连接部件均位于中空腔和圆柱盲孔内;
14.所述固定环的环面上开设若干方孔二,所述止动杆的一端可插入所述方孔二中。
15.上述方案中,所述收放杆为中空结构,顶部设置锥形凸台,底部设有与多旋翼无人机连接的底座,所述底座上设置充电连接点。
16.上述方案中,所述限位板后端开设长条孔,位于下网体后端的一根支撑杆位于长条孔内。
17.上述方案中,所述后压板顶部固定安装于所述安装架上。
18.上述方案中,所述控制器安装于所述安装架上。
19.上述方案中,所述上网体、下网体的框架以及支撑杆均为中空结构,内部布设充电线路与所述控制器相连。
20.一种多旋翼无人机回收、释放与充电方法,采用上述的多旋翼无人机自动回收、释放与充电装置,包括回收充电过程和释放过程,在回收多旋翼无人机前,上网体和下网体的网孔处于对齐状态;所述回收充电过程如下:
21.当多旋翼无人机飞到下网体下方后,再自主向上移动使收放杆插入网孔中,在收放杆顶部触碰到限位板后,向控制器发出信号,启动电机正向旋转,通过自锁传动装置、带动主动齿轮、从动齿轮和丝杠螺母旋转,因丝杠螺母位置固定,故滚珠丝杠连同上网体一起向后水平移动;
22.上网体向后水平移动将使收放杆所在的网孔缩小,从而夹住收放杆,收放杆上的弹性垫层被压缩,露出充电触点,与上网体和下网体上的夹持充电头一和夹持充电头二接触,网孔进一步缩小,弹性垫层被压缩到最小,充电触点和夹持充电头也紧密接触,此时,上网体到达预定位置,收放杆被夹紧;
23.控制器在收到上网体到达预定位置的信号后,切断电机的电源,自锁传动装置动作,保证上网体和下网体对收放杆的夹持不会放松,然后自锁传动装置将夹持牢固的信号发送给控制器,控制器通知无人机停机;
24.所述释放过程如下:
25.在需要释放多旋翼无人机时,控制器首先通知所夹持的多旋翼无人机启动,然后控制电机反向转动,通过自锁传动装置,带动主动齿轮、从动齿轮和丝杠螺母旋转,丝杠螺母位置固定,故滚珠丝杠带动上网体向前移动,使收放杆所在的网孔放大,此时收放杆上的弹性垫层在弹性作用下恢复形状,当上网体移到最前端时,向控制器发出信号,控制器切断电机电源,最后多旋翼无人机向下飞出,脱离收放装置。
26.上述方案中,在回收充电过程中,电机正转,电机轴带动双向自锁传动装置的主动轴转动,主动轴先通过连杆带动止动杆拉回,然后再带动从动轴共同旋转;在收放杆被夹紧后,切断电机电源,双向自锁传动装置的压缩弹簧将止动杆向外顶,在收放杆的弹性垫层膨胀力以及外界振动作用下,上网体有向前的微小移动,使得双向止动器的止动杆立即卡进固定环的最近的孔中,保证上网体和下网体对收放杆的夹持不会放松;在释放过程中,电机反转,电机轴将带动双向自锁传动装置的主动轴反转将止动杆拉回,然后继续带动从动轴一起反转。
27.通过上述技术方案,本实用新型提供的多旋翼无人机自动回收、释放与充电装置具有如下有益效果:
28.1、本实用新型的回收、释放与充电装置可作为一个模块整体装卸,既可以实现多旋翼无人机的回收和充电,同时还能灵活实现多旋翼无人机的多次释放。
29.2、本实用新型的装置既适合于固定平台上多旋翼无人机的回收与释放,同时还适合于空中移动平台上多旋翼无人机的回收与释放。
30.3、本实用新型的装置采用上网体和下网体的相对运动实现网孔上夹持充电头对收放杆的夹紧和松开,从而实现对多旋翼无人机的回收与释放,结构简单,体积小,同时,网孔的空间大,对飞行状态下的多旋翼无人机的定位精度要求低,特别适合于空中移动平台上的多旋翼无人机回收。
31.4、本实用新型采用自锁传动装置实现自锁功能,保证扭矩只能从主动轴传递到从动轴,保证收放杆不会从装置中脱落。
32.5、本实用新型的收放杆顶部设置锥形凸台,锥形凸台可以勾住网孔,可以进一步保证多旋翼无人机的收放杆不会从装置中脱落,并且锥形凸台顶端为锥形可以便于插入到上网体和下网体的网孔内。
33.6、本实用新型收放杆上的弹性垫层,在夹紧时可以增加摩擦力便于夹持,在释放时可以自动将锥形凸台推离上下网体,防止锥形凸台勾住网孔,另外还可保护充电触点。
附图说明
34.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
35.图1为本实用新型实施例所公开的一种双向自锁传动装置组装示意图;
36.图2为本实用新型实施例所公开的一种双向自锁传动装置爆炸示意图;
37.图3a为主动轴结构示意图;
38.图3b为主动轴的中空腔剖面图;
39.图4a为从动轴结构示意图一;
40.图4b为从动轴结构示意图二;
41.图5a为固定环结构示意图;
42.图5b为固定环径向剖面图;
43.图6a为固定环加法兰盘结构图;
44.图6b为固定环加安装座结构图;
45.图7为扭转弹簧结构示意图;
46.图8为止动杆结构示意图;
47.图9为连杆结构示意图;
48.图10为去掉固定环后的传动装置组合示意图;
49.图11为主动轴和从动轴连接示意图;
50.图12为主动轴内部连接关系示意图;
51.图13为剖切和观察方式示意图;
52.图14为图13的剖切示意图;
53.图15a为双向自锁传动装置自锁状态平面图;
54.图15b为双向自锁传动装置自锁状态立体剖面图;
55.图16a为双向自锁传动装置锁定解除状态平面图;
56.图16b为双向自锁传动装置锁定解除状态立体剖面图;
57.图17a为双向自锁传动装置正常旋转状态平面图;
58.图17b为双向自锁传动装置正常旋转状态立体剖面图;
59.图18为多旋翼无人机与收放装置整体示意图;
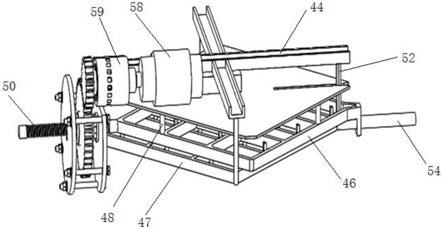
60.图19为收放装置结构示意图;
61.图20为多旋翼无人机示意图;
62.图21为收放杆拆分结构示意图;
63.图22为上网体部分结构示意图一;
64.图23为上网体部分结构示意图二;
65.图24为下网体部分结构示意图;
66.图25为动力传动部分结构示意图;
67.图26为安装架与电机部分示意图;
68.图27为收放杆被夹紧状态示意图(隐藏限位板)。
69.图中,1、主动轴;2、主动轴轴承;3、轴承挡圈一;4、扭转弹簧;5、固定环;6、从动轴;7、从动轴轴承;8、轴承挡圈二;9、压缩弹簧;10、止动杆;11、连杆;12、输入端; 13、主动配合端;14、中空腔;15、扇形块;16、扇形面;17、销轴一;18、轴肩一;19、挡圈槽一;20、输出端;21、从动配合端;22、圆柱盲孔;23、方孔一;24、楔形槽;25、轴肩二;26、挡圈槽二;27、固定轴;28、销轴二;29、安装孔一;30、安装孔二;31、安装孔三;32、方孔二;33、轴肩三;34、轴肩四;35、法兰盘;36、安装座;37、多旋翼无人机;38、收放装置;39、收放杆;40、充电触点;41、弹性垫层;42、开孔;43、锥形凸台;44、安装架;45、控制器;46、上网体;47、下网体;48、连接杆;49、限位板;50、滚珠丝杠;51、导向孔;52、支撑杆;53、后压板;54、导向杆;55、长条孔;56、夹持充电头一;57、夹持充电头二;58、电机;59、双向自锁传动装置;60、主动齿轮;61、从动齿轮;62、丝杠螺母;63、前推力轴承;64、后推力轴承;65、前压板;66、螺栓;67、底座;68、充电连接点;69、加强筋。
具体实施方式
70.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
71.本实用新型提供了一种多旋翼无人机自动回收、释放与充电装置,如图18所示,包括固定于图20所示的多旋翼无人机37顶部的收放杆39和固定于回收平台上的收放装置38。
72.如图21所示,收放杆39的杆体上设有充电触点40,充电触点40外的杆体上套有弹性垫层41,弹性垫层41上开设与充电触点40对应的开孔42,当弹性垫层41受到挤压时,会将充电触点40露出,与上网体46和下网体47上的夹持充电头一56和夹持充电头二57接触,进行充电。收放杆39为中空结构,顶部设置锥形凸台43,锥形凸台43可以勾住网孔,可以进一步保证多旋翼无人机37的收放杆39不会从装置中脱落。收放杆39底部设有与多旋翼无人机37连接的底座67,底座67上设置充电连接点68,底座上还设置加强筋69。
73.如图19所示,收放装置38包括与回收平台连接的安装架44、网体部分、动力传动部分和控制器45。网体部分包括上网体46和下网体47,如图22和图23所示,上网体46通过连接杆48连接上方的限位板49,上网体46前端固定连接滚珠丝杠50,后端开设导向孔51。如图24所示,下网体47通过支撑杆52连接安装架44,下网体47前端固定连接后压板53,后端连接导向杆54;滚珠丝杠50穿过后压板53,导向杆54穿过导向孔51;限位板49后端开设长条孔55,位于下网体47后端的一根支撑杆52位于长条孔55内。
74.上网体46的每个网格的前端角落设置夹持充电头一56,下网体47的每个网格的后端角落设置夹持充电头二57,在上网体46前后移动过程中,网格的空间会改变,通过夹持充电头一56和夹持充电头二57实现对收放杆39的夹持充电或释放。
75.如图25所示,动力传动部分包括电机58、自锁传动装置、主动齿轮60、从动齿轮61和丝杠螺母62,电机58通过自锁传动装置连接主动齿轮60,主动齿轮60与从动齿轮61啮合,从动齿轮61与丝杠螺母62固定连接,丝杠螺母62位于滚珠丝杠50上,丝杠螺母62的前后两侧分别安装前推力轴承63和后推力轴承64,前推力轴承63连接前压板65,后推力轴承 64连接后压板53,前压板65和后压板53之间通过螺栓66固定连接。后压板53顶部固定安装于安装架44上,作为安装架44的一个支撑杆。通过上述结构,在从动齿轮61带动丝杠螺母62转动时,由于丝杠螺母62被前推力轴承63、后推力轴承64和前压板65、后压板53所固定,只能旋转,不能平移,因此滚珠丝杠50会带动上网体46前后移动。
76.如图26所示,安装架44由槽钢焊接成十字形构成,收放装置通过安装架44与固定平台或移动平台(如飞机)进行固定且可快速拆卸。控制器45固定在安装架44的下方,集成了电源接口和信号接口,连接电机58和各处传感器,可与外部电源和信号处理装置快速连接。
77.本实施例中上网体46、下网体47的框架以及支撑杆52均为中空结构,内部布设充电线路与控制器45相连。
78.本实用新型的自锁传动装置可以为单向自锁传动装置或双向自锁传动装置。
79.本实施例中采用双向自锁传动装置,如图1和图2所示,包括主动轴1、主动轴轴承2、轴承挡圈一3、扭转弹簧4、固定环5、从动轴6、从动轴轴承7、轴承挡圈二8、压缩弹簧9、止动杆10和连杆11。如图10所示的组装图,主动轴1和固定环5之间设置主动轴轴承2,从动轴6和固定环5之间设置从动轴轴承7,如图11所示的组装图,主动轴1和从动轴6之间连接扭转
弹簧4。
80.如图3a和图3b所示,主动轴1包括输入端12和与从动轴6相配合的主动配合端13,主动配合端13设有中空腔14,中空腔14由轴向方向的两个侧面以及上下两个扇形块15围成,如图12所示,可以容纳两个止动杆10、两个连杆11和一个压缩弹簧9在其中运动;扇形块15的两个矩形平面可与止动杆10的侧面紧密相贴,并通过止动杆10向从动轴6传递转矩。
81.中空腔14内一侧端面上设置下凹的扇形面16,每个扇形面16上设置一个销轴一17,销轴一17可与连杆11一端的安装孔三31铰接,下凹的扇形面16为连杆11在一定角度范围内旋转提供了空间。
82.主动轴1的输入端12和主动配合端13之间设置轴肩一18,主动轴1的输入端12开设挡圈槽一19,挡圈槽一19内嵌有轴承挡圈一3,主动轴轴承2安装于主动轴1上,位于轴承挡圈一3和轴肩一18之间,主动轴轴承2的内圈通过轴承挡圈一3和轴肩一18固定,外圈通过固定环5的轴肩三33固定,用于固定环5和主动轴1的相对旋转运动。
83.如图4a和图4b所示,从动轴6包括输出端20和与主动轴1相配合的从动配合端21,从动配合端21的端面上开设圆柱盲孔22,圆柱盲孔22用于容纳主动轴1的主动配合端13 在其中旋转,从动配合端21的侧面开设一对与圆柱盲孔22相通的方孔一23,方孔一23用于容纳止动杆10在其中沿径向伸缩滑动。圆柱盲孔22的开口端面上还设有与方孔一23相通的一对楔形槽24,楔形槽24用于容纳连杆11在其中摆动。
84.从动轴6的输出端20和从动配合端21之间设置轴肩二25,从动轴6的输出端20开设挡圈槽二26,挡圈槽二26内嵌有轴承挡圈二8,从动轴轴承7安装于从动轴6上,位于轴承挡圈二8和轴肩二25之间,从动轴轴承7的内圈通过轴承挡圈二8和轴肩二25固定,外圈通过固定环5的轴肩四34固定,用于固定环5和从动轴6的相对旋转运动。
85.轴肩一18朝向主动配合端13的一侧面上开设安装孔一29,从动配合端21的端面上开设安装孔二30,如图7所示的扭转弹簧4的两端分别嵌于安装孔一29和安装孔二30内。
86.每个方孔一23内均活动设置一个止动杆10,如图8所示,止动杆10底部设置固定轴27,压缩弹簧9两端分别套于两根止动杆10的固定轴27上,将两个止动杆10向外推。止动杆 10中部设置销轴二28,相邻的销轴一17和销轴二28之间设置连接杆,如图9所示,连杆 11两端分别开设与销轴一17和销轴二28铰接的安装孔三31。止动杆10、压缩弹簧9和连接杆均位于中空腔14和圆柱盲孔22内。另外,连杆11可以使用结实的细绳代替。
87.如图5a和图5b所示,固定环5的环面上开设若干方孔二32,止动杆10的一端可插入方孔二32中。固定环5的内表面设有用于分别固定主动轴轴承2和从动轴轴承7的轴肩三 33和轴肩四34。如图6a和图6b所示,固定环5外设置法兰盘35或安装座36,以便于将其固定在其它设备基座上。
88.为更好地说明装置在使用过程中内部零件的运动,将装置剖开只保留一侧,并显示剖面的一侧,如图13和图14所示。
89.首先,假定装置的初始状态为自锁状态,如图15a和图15b所示,此时主动轴1无输入转矩,主动轴1与从动轴6无相对转动位移,扭转弹簧4无变形,两个止动杆10分别被压缩弹簧9推出从动轴6伸入止动环的方孔内。
90.当对主动轴1输入任意方向的转矩时(此处假定为顺时针转矩),主动轴1将随转矩转动。主动轴1首先通过连杆11拉动两根止动杆10克服压缩弹簧9的阻力向内移动脱离固定
环5 的方孔二32,解除从动轴6的锁定,如图16a和图16b所示。此时主动轴1相对于从动轴6 转动一定的角位移,扭转弹簧4也随之产生变形。
91.然后主动轴1继续旋转,中空腔14内两个扇形块15的各一个侧面分别贴在一根止动杆 10的侧面上,通过止动杆10将转矩传递到从动轴6上,从而带动从动轴6转动,如图17a 和图17b所示。在从动轴6旋转阻力及其他负载的作用下,压缩弹簧9与扭转弹簧4始终保持锁定解除的变形状态,主动轴1与从动轴6的角位移也保持不变,因此止动杆10不会向外滑动伸入固定环5的方孔二32内,也就不会影响装置的正常转动。
92.当主动轴1的转矩消失后,扭转弹簧4首先克服主动轴1的转动惯性、旋转阻力等带动主动轴1相对于从动轴6反向旋转,直至主动轴1与从动轴6的角位移消失,扭转弹簧4恢复原状。同时,压缩弹簧9推动止动杆10沿从动轴6的径向向外伸出。此时,止动杆10有可能顶在固定环5内圆环侧而非直接插入固定环5的方孔二32内,但只要从动轴6有任意方向的微小转动(如在负载作用下的反向转动),止动杆10将立即插入最近的固定环5的方孔二32内,从而恢复到自锁状态。
93.在自锁状态下,若主动轴1无输入转矩,由于止动杆10同时卡在从动轴6和固定环5的方孔二32内,因此,无论从动轴6有什么方向的负载,均无法转动,从而从动轴6的锁定,实现装置的预定功能。
94.另外,由于受尺寸和结构强度的限制,固定环5的方孔二32数量有限,装置无法在任意位置实现即时自锁,但通过在传动中(如主动轴1与电机58之间或从动轴6与负载之间)加入大传动比的齿轮副,可极大地减小自锁空行程对负载定位的影响,从而提高装置锁定位置的精度。
95.本实用新型的一种多旋翼无人机37回收、释放与充电方法,包括回收充电过程和释放过程,在回收多旋翼无人机37前,上网体46和下网体47的网孔处于对齐状态;回收充电过程如下:
96.当多旋翼无人机37飞到下网体47下方后(可通过视觉识别或其他方式确定无人机和装置的相对位置),再自主向上移动使收放杆39插入网孔中,在收放杆39顶部触碰到限位板 49后,向控制器45发出信号,启动电机58正向旋转,电机58轴带动双向自锁传动装置59 的主动轴转动,主动轴先通过连杆带动止动杆拉回,然后再带动从动轴共同旋转,从而带动主动齿轮60、从动齿轮61和丝杠螺母62旋转,因丝杠螺母62位置固定,故滚珠丝杠50连同上网体46一起向后水平移动;
97.上网体46向后水平移动将使收放杆39所在的网孔缩小,从而夹住收放杆39,收放杆39 上的弹性垫层41被压缩,露出充电触点40,与上网体46和下网体47上的夹持充电头一56 和夹持充电头二57接触,网孔进一步缩小,弹性垫层41被压缩到最小,充电触点40和夹持充电头也紧密接触,此时,上网体46到达预定位置,收放杆39被夹紧,如图27所示;
98.控制器45在收到上网体46到达预定位置的信号后,切断电机58的电源,双向自锁传动装置59的压缩弹簧将止动杆向外顶,在收放杆39的弹性垫层41膨胀力以及外界振动作用下,上网体46有向前的微小移动,使得双向止动器的止动杆立即卡进固定环的最近的孔中,保证上网体46和下网体47对收放杆39的夹持不会放松,然后自锁传动装置将夹持牢固的信号发送给控制器45,控制器45通知无人机停机。
99.释放过程如下:
100.在需要释放多旋翼无人机37时,控制器45首先通知所夹持的多旋翼无人机37启动,然后控制电机58反向转动,电机58轴将带动双向自锁传动装置59的主动轴反转将止动杆拉回,然后继续带动从动轴一起反转,进而带动主动齿轮60、从动齿轮61和丝杠螺母62旋转,丝杠螺母62位置固定,故滚珠丝杠50带动上网体46向前移动,使收放杆39所在的网孔放大,此时收放杆39上的弹性垫层41在弹性作用下恢复形状,当上网体46移到最前端时,向控制器45发出信号,控制器45切断电机58电源,最后多旋翼无人机37向下飞出,脱离收放装置38。
101.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1