防除无人机的制作方法
1.本发明涉及防除无人机,其容易更换螺旋桨,除了臂杆、滑道和主机架之外,只采用一个药筒而在内部安装螺旋桨、电池、传感器等,可以向多个方向喷射。
背景技术:
2.一般的无人机(drone)根据情况、目的和国家而有不同的称呼,通常它是可以通过无线电波操控的无人航空器(uav,unmanned aerial vehicle)、无需载人而通过无线电波引导来实现飞行控制的飞行器或直升机形状的无人机的总称。
3.这种类型的无人机中,防除无人机具有的优点在于,可以在广阔的农田中保持适当的高度,可以均匀地喷洒适量药剂。
4.防除无人机使用可拆卸的药筒,采用向下喷射药剂的方式,并采用下部具有相当于脚(foot)的腿部结构物,上部具有用于飞行的螺旋桨结构物等的复杂的组合结构。
5.但是,在果园等具有果树的林牧场上,这种结构会因无人机的结构物被果树的树枝或果园底部等钩住而难以有效地飞行,因而存在无法有效发挥防除作用的问题,从而需要一种结构更简单、更便于移动的无人机。
6.以果树为例,大多数情况下,在树的内部结果,向下喷射的结构难以直接向果实喷射药剂,因此需要一种可以向上喷射的无人机。
技术实现要素:
7.(要解决的技术问题)
8.本发明为了解决上述问题而提出,本发明的目的在于,提供一种无人机,将容纳药剂等流体的药筒用作嵌入螺旋桨单元或控制单元的结构的外壳,从而最大限度减少暴露在无人机外部的构件,使防除无人机在防除时产生的与无人机障碍物之间的碰撞最小化,从而实现防除功能的最大化。
9.(解决问题的手段)
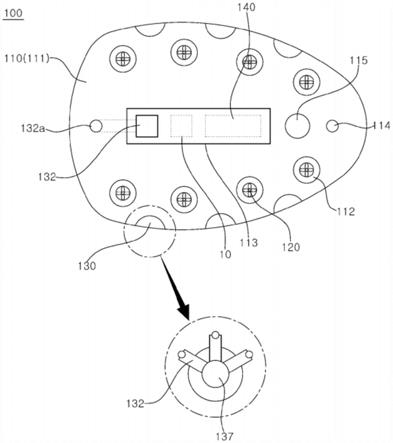
10.作为解决上述技术问题的手段,本发明的实施例中,如图1所示,提供一种防除无人机,包括:主体110,内部储存流体;螺旋桨单元120,以嵌入式结构安装到以贯通所述主体110的结构形成的圆形孔112;喷射单元130,设置在所述主体110的内部,具有喷射被容纳到所述主体110内部的流体的喷嘴部131;及控制单元140,以嵌入式结构设置在所述主体110内部,控制所述螺旋桨单元120和所述喷射单元130的驱动。
11.(发明的效果)
12.根据本发明的实施例,其效果在于,将容纳药剂等流体的药筒用作嵌入螺旋桨单元或控制单元的结构的外壳(主体),从而最大限度减少暴露在无人机外部的构件,使防除无人机在防除时产生的与无人机障碍物之间的碰撞最小化,从而实现防除功能的最大化。
13.并且,在无人机主体的内部以嵌入式结构设置喷射单元,可以随意转换喷头的方向,可以实现从果树的下部到上部等多个方向上的喷射,可以确保喷洒药剂的效率。
14.进而,喷射单元的药剂喷射方式采用通过空气的压力吸入流体并以雾状喷射的空气静压喷射方式,实现包括果树的下部到上部等多种方向上的喷射,可以实现药剂喷射范围的扩张。
15.并且,以嵌入式结构设置在药剂筒内部的螺旋桨单元可以与马达结合而被安装到圆形孔内部,采用可拆卸方式,可以提高更换及维护的效率。
附图说明
16.图1是本发明的一个实施例的防除无人机的平面图。
17.图2是以图1示出的螺旋桨单元为基准的防除无人机的剖视图。
18.图3是图1中示出的螺旋桨单元的立体图。
19.图4是示出图1的螺旋桨单元的操作状态的图。
20.图5是以图1示出的喷射单元为基准的防除无人机的剖视图。
21.图6及图7是图5的喷嘴部的剖视图,示出喷头的旋转状态。
22.图8是图6、7的a-a截面图。
23.图9是图1示出的防除无人机的底视图。
24.图10是与图1的圆形孔相结合的保护件的立体图。
25.图11是图10中示出的保护件的正视图、底视图。
26.图12是示出图11的保护件与圆形孔的结合状态的图。
27.符号说明
28.100:防除无人机110:主体
29.120:螺旋桨单元130:喷射单元
30.140:控制单元
具体实施方式
31.为了足够详细地对本发明进行描述,以使本发明所属技术领域的普通技术人员能够容易地实施本发明的技术思想,下面将参照本发明的最优选实施例进行描述。
32.需要说明的是,在对各附图的部件附加附图标记时,即使在不同的附图中显示相同的部件,也尽量使用相同的附图标记。并且,在解释本发明时,如果确定相关的已知结构或对功能的详细描述可能会混淆本发明的主旨,则将省略该详细描述。
33.下面参照图1至图12详细描述本发明的一个实施例的防除无人机。
34.图1是本发明的一个实施例的防除无人机的平面图,图2是以图1示出的螺旋桨单元为基准的防除无人机的剖视图,图3是图1中示出的螺旋桨单元的立体图。
35.参照图1至图3,本发明的一个实施例的防除无人机包括:主体110,内部容纳流体;螺旋桨单元120,以嵌入式结构安装到以贯通所述主体110的结构形成的圆形孔112;喷射单元130,设置在所述主体110的内部,具有喷射被容纳到所述主体110内部的流体的喷嘴部131;及控制单元140,以嵌入式结构设置在所述主体110内部,控制所述螺旋桨单元120和所述喷射单元130的驱动。
36.所述主体110具有内部是空的容纳空间,可以在容纳空间内储存流体。这种情况下,流体的概念包括水、药剂、农药等的液体。所述主体110的形状并未采用现有无人机中无
人机的框架结构和药剂筒彼此分开形成的防除无人机的结构,而是改变容纳药剂的药筒本身的结构,从而能够作为药筒容纳药剂的同时,去除外部的臂杆、滑道和主机架等基本结构物,能够容纳螺旋桨单元或控制单元等主要构件。这种结构在药筒内部以嵌入式结构安装螺旋桨单元或控制单元等主要构件,从而最大限度减少飞行时暴露在无人机外部的构件,可以解决无人机在果树或树木等的周围飞行时,被树枝或其他障碍物钩住的问题。
37.并且,所述主体110的内部是空的,可以容纳流体,采用杏仁形状的流线型结构,从而可以减少飞行时的空气阻力,可以使用众所周知的具有一定刚度的轻质材料制造,例如塑料树脂、铝材等。
38.图1示出的所述主体110的外形以整体上具有椭圆形结构为例,但并不受限于此,可以采用多种结构的药筒作为主体,只要能够嵌入后述的螺旋桨单元或控制单元等无人机的主要构件的结构,就应视为包含在本发明的主旨内。
39.参照图1及图2,本发明的一个实施例的所述主体110的结构如以下描述。所述主体110包括:流体外壳111,内部具有可以容纳流体的空间;多个圆形孔112,以贯通所述流体外壳111的结构形成;以及控制室113,呈现为以嵌入式结构安装所述控制单元140的空间部。
40.所述流体外壳111如图1及图2所示,呈现为保持外部骨骼的药筒的外部和内部形成容纳空间的结构,优选地,如图2所示,通过至少一个以上的隔墙部划分内部药剂容纳空间。这是为了当内部储存了流体时,最大限度地减少流体因无人机在飞行时的加速或减速、方向的转换等而在内部流动的现象来提高飞行稳定性。
41.并且,所述流体外壳111的上部形成凹陷的安装区域,从而以嵌入式结构安装控制室113。在所述控制室113内封装向所述螺旋桨单元120和喷射单元130等所述防除无人机100的电子设备提供电源的电池10、所述控制单元140。这种情况下,所述电池10可以使用一次性电池、可以充电的锂电池等公知的电池,如果采用可以充电的电池,可以从所述控制室113拆卸而另外进行充电,或者通过电源连接器而对所述控制室113充电。
42.并且,可以通过罩113a打开和关闭所述控制室113,平时或者所述防除无人机100运行时,防止异物进入所述控制室113的内部。这种情况下,优选地,所述罩113a与所述控制室113铰链结合或者通过螺栓等公知的固定件设置到所述控制室113。进而,所述流体外壳111上可以设置通过遥控器或用户的终端机接收所述防除无人机100的驱动信号的天线114。
43.此外,在所述流体外壳111的上部形成注入孔115而流体能够流入内部,通过盖115a打开和关闭所述注入孔115。所述盖115a通过铰链结合或螺丝结合设置到所述流体外壳111。
44.并且,本发明的所述主体110形成以贯通所述流体外壳111的结构具备的多个圆形孔112。本发明的实施例中,将
‘
圆形孔’定义为具有圆形横截面的贯通孔。但这只是一个实施例而已,但并不受限于上述
‘
圆形孔’只要能够垂直贯通主体110的贯通型结构的孔,都包含在上述定义中。基于设置在所述圆形孔110内部的螺旋桨单元120的操作而产生的空气的流动起到使所述主体110上下自由移动的通道的功能即可,只要能够呈现内部可以安装螺旋桨单元的嵌入型结构,都应视为包括在上述结构中。
45.进而,本发明的实施例中,所述圆形孔112通过射出方式以整体形成在所述流体外壳111,形成掩埋从所述电池10传输电力的电线的通道。
46.并且,所述圆形孔112包括与所述螺旋桨单元120结合或分离的安装部,螺旋桨单元以嵌入型安装到圆形孔内部。
47.关于本发明实施例的防除无人机,基于螺旋桨120的旋转产生的推力而飞行,其中,所述圆形孔112沿着所述流体外壳111的宽度方向以圆柱形态形成时,基于所述螺旋桨120的旋转的空气的流动被局限在向下的方向,从而实现所述防除无人机100的飞行。
48.关于所述螺旋桨单元120,在所述圆形孔112的一侧可以形成网格形态的保护件(参照图10的190),可以使用钢铁或塑料树脂材料,所述保护件以位于所述螺旋桨120上部地设置在所述圆形孔112,防止所述防除无人机100飞行时,所述螺旋桨120被树枝等不特定障碍物而受损。
49.图3示出图1中螺旋桨单元120的主要构件即螺旋桨。
50.关于本发明实施例的螺旋桨单元120的结构,螺旋桨结构可以采用公知的多种螺旋桨形态,据此,被设置到圆形孔112的内部而旋转时,只要是能够从上部向下部产生空气的流动而形成推力的结构,都可以应用到本发明。
51.图4是图1至图3中用于描述上述本发明的防除无人机的飞行原理和方向转换的概念图。如图4所示,在本发明的防除无人机的主体110上,以嵌入型结构设置多个螺旋桨单元120。
52.这种情况下,所述螺旋桨单元120的一部分使得所述防除无人机100前进后退,其余左右所述防除无人机100的移动方向。作为一例,通过控制以嵌入型结构设置到所述主体110的外角部的四双螺旋桨单元的旋转速度和动作来实现上升和下降,通过调整螺旋桨单元的倾斜度的过程,可以实现前进和后退,左右移动时,向需要移动的方向形成推力的话,通过控制螺旋桨的旋转速度来形成推力的差异而实现。
53.图5是以图1示出的喷射单元为基准的防除无人机的剖视图,图6及图7是图5的喷嘴部的剖视图,示出喷头的旋转状态,图8是图6、7的a-a截面图。
54.参照图5,本发明实施例的喷射单元130包括:喷嘴部131,设置在所述主体110的内侧侧面,一端被暴露在所述主体110的外部;气泵132,设置在所述主体110内部,向所述喷嘴部131注入外部空气;及流体流入管133,一侧端部设置在所述主体110的内部,另一侧端部设置在所述喷嘴部131。图5中以一对喷射单元为例,但并不受限于此,如图4所示,可以沿着所述主体110的侧面设置多个喷射单元130。此外,根据无人机的防除任务,为了按照场所和状况所需的个数来设置喷射单元,可以在主体内部的多个地方变更设置位置。
55.如图6所示,所述喷射单元130的所述喷嘴部131与所述气泵132连接而沿着所述流体外壳111的外角边缘方向设置多个,并且所述喷嘴部131包括以所述主体的宽度方向的水平面为基准以一定角度倾斜的结构设置的多个喷头136。
56.尤其,参照图6,关于所述喷嘴部131,采用空气正压喷射方式喷射流体,由所述气泵132供给的空气被供应到所述喷嘴部131而移动,基于由移动的所述空气的流动产生的压力,通过所述流体流入管133吸入的流体上升到所述喷嘴部131,流入所述喷嘴部131的流体与所述空气产生碰撞并以喷雾形态喷射。
57.如图6,当喷头的喷嘴部136朝向上部方向的情况下,朝上部喷射喷雾形态的流体,这是从果树的下部向上部喷射,对于果树的内部和外部的果实,也可以进行有效的药剂喷射,因喷雾形态的流体喷射,可以向更广的范围喷洒药剂。
58.为此,形成多个所述喷头136,沿着所述流体外壳111的方向以一定间隔隔开地设置在所述流体外壳111的侧面。所述喷嘴部131连接到所述气泵132,连通到流入外部空气的流路135,以所述主体110的宽度方向为基准,以一定角度倾斜的结构形成喷头136。
59.所述流体流入管133连通到所述流路135的空气向直径方向流动的轴颈部135a的中心。即,基于通过与所述气泵132连接的空气排放管132b的外部空气的流速而所述流路135a中产生的压力差,流体沿着所述流体流入管133流动而进入所述流路135a,进入所述流路135a的流体与外部空气混合而通过所述喷头136被喷射到外部。根据气泵132中产生的空气的压力状态,所述轴颈部135a的形状可以增大或缩小成多种形态。
60.图7示出图6的喷射单元130的喷头136的位置朝向上部的结构中,通过旋转而喷头136朝向下部的状态。图8示出图6及图7的喷射单元130中喷头136旋转的操作状态的正视图。
61.即,本发明的喷射单元130还可以包括喷嘴旋转部137,使入口旋转而将所述喷头136的暴露方向朝向上部或下部。
62.这种情况下,所述喷嘴旋转部137包括:旋转壳体137a,容纳所述喷头136,执行旋转操作;旋转马达137b,提供实现所述旋转壳体137a的旋转的动力;旋转轴137c,将所述旋转马达137旋转力传递到所述旋转壳体137a。基于所述旋转壳体137a的旋转而将喷嘴部131从果树的下部向上部喷洒流体(药剂等)的情况下,即使使用本发明的防除无人机,可以根据需要,使得喷头的方向朝向下部而实现向下的喷洒。
63.并且,作为可选的构件,可以包括喷嘴分离部137d,基于所述旋转壳体137a的旋转,与喷嘴部131的中端部138分离。
64.这种喷射单元如图9所示,可以将其设置在多个位置,本发明的一个实施例的防除无人机中,主体110的下部还可以包括着陆单元180。这种着陆单元180的形状或结构是不被外部障碍物钩住的结构,如图5所示,可以在主体110下部形成轮子结构物,这种情况下,着陆单元180的一部分呈现为被嵌入到主体110内部的结构,从而最大限度减少暴露,采用即使与地面产生碰撞的情况下,也能最大限度减少暴露地着陆或持续飞行的结构。
65.图9的喷射单元130的操作可通过控制单元(图1的140)呈现,控制单元包括通信部、操作部,所述通信部以所述天线114为媒介而通过遥控器接收所述螺旋桨单元120和喷射单元130的驱动信号,可以采用无线网络、蓝牙等公知的无线方式。这种情况下,所述操作部基于通过所述通信部接收的驱动信号执行相应构件的驱动。即,根据所述螺旋桨马达124的正方向或反方向驱动信号来驱动所述气泵(图2:132)而通过所述喷头(图6:136)喷洒流体。
66.图10是与图1的圆形孔112上部或下部相结合的保护件的立体图,图11的a是图10中示出的保护件的正视图、b是图10中示出的保护件的底视图,图12是示出图10的保护件与圆形孔的结合状态的图。
67.如图10所示,本发明的防除无人机还可以包括:保护件190,结合到圆形孔(图1:112)的上部或下部,具有引导基于所述螺旋桨单元的驱动的空气的流动的流体孔191a。所述保护件190是用于保护所述螺旋桨单元120的构件,防止被树枝等不特定障碍物钩住。
68.这种情况下,所述保护件190包括:保护罩191,结合到所述圆形孔112的上端或下端;隔墙192,以沿着所述保护罩191的直径方向以相互隔开的结构设置的多个平板型结构
延长。所述保护罩191为板状,与所述圆形孔112的上端或下端直径相对应。所述保护罩191上形成流体孔191a,基于所述螺旋桨120而沿着所述圆形孔112流动的空气可以通过所述保护罩191,沿着所述保护罩191的直径方向形成所述隔墙192。
69.即,当树枝通过所述流体孔191a进入时,树枝以一个均匀的角度被所述隔墙192钩住,随着所述防除无人机100移动,树枝重新被排出到流体孔191a外部,从而保护所述螺旋桨120。
70.尤其,优选地,所述多个隔墙192采用保持所述流体孔191a且与所述保护罩191的表面形成倾斜角的结构。即,如图10至图12所示,所述隔墙192是以所述保护罩191的表面形成的虚拟水平面为基准而向下部方向突出的结构,以所述保护罩191的表面形成的虚拟水平面为基准而向上下垂直方向突出的结构。
71.并且,图10的结构中,以所述隔墙192结构物向下部方向突出为例,但并不受限于此,可以具有以所述保护罩191的表面形成的虚拟水平面为基准而向上部方向突出的结构物。
72.即,所述多个隔墙192可以朝向倾斜结构的上部及下部方向形成。这种结构的结合是非常有效率的结构,例如当从上部降落的树枝等障碍物通过保护罩191的流动孔191a进入时,首先因隔墙的倾斜结构而被钩住,随着飞行,可以将其向后移除。并且,当所述隔墙192结构具有向保护罩191的上部方向突出的结构时,可以在本发明的主体的下部,以所述隔墙192突出的结构进行安装,这种情况下,将向外部暴露的隔墙192结构呈现为外角部具有圆形曲率的结构,从而将其应用为着陆部。
73.参照图12,本发明中,在以贯通形结构形成在主体(图1:110)的圆形孔112的上端或下端,沿着所述圆形孔112的圆周方向凹陷地形成放置部112a,所述保护件190结合到所述圆形孔112。并且,通过所述流体孔191a拉住所述保护罩191时,所述保护罩191脱离所述放置部112a而使所述保护件190从所述圆形孔112分离。
74.如上所述,根据本发明的防除无人机,包括药剂等流体被储存到主体内部而无需另外的储槽及将储槽安装到防除无人机所需的结构物。并且,因与主体结合或分离的螺旋桨单元,使得螺旋桨的更换及维护变得容易。并且,喷头通过喷射单元向上方或下方旋转而扩张了流体的喷射范围。
75.如上所述,最佳实施例已在附图和说明书中公开。虽然在此使用了特定的术语,但仅用于描述本发明,而不用于含义的限定或限制权利要求书中记载的本发明的范围。因此,本技术领域的普通技术人员将理解,由此可以进行各种修改和等效的其他实施例。因此,本发明的真正的技术保护范围应由所附权利要求书的技术思想确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1