设有保持检测装置的上位锁的制作方法
1.本发明涉及一种比如在飞行器上使用的上位锁,用于将飞行器起落架或货舱门保持在缩回位置,并且更一般地,用于将飞行器的任何移动元件保持在其位置之一中。
背景技术:
2.以本身已知的方式,这种类型的上位锁包括在保持位置和释放位置之间枢转地安装在上位锁上的钩,以及用于锁定该钩的构件,当钩被带入保持位置时,该构件被推动就位用于锁定该钩,并且该构件被解锁致动器朝向解锁位置推回,以使钩能够朝向释放位置摆动,从而释放可移动元件。
3.钩与可移动元件的捕获销协配,当该元件到达它被保持的位置时,将钩推到保持位置中,在该保持位置中钩被锁定构件自动锁定。可移动元件的捕获销随后被捕获在钩中,并且不能从中释放。为了使得可移动元件能够被释放,必须将锁定构件推回到解锁位置,例如借助解锁致动器。然后可移动元件自由地离开其中它被保持的位置,捕获销从保持位置朝向释放位置驱动该钩。
4.上位锁通常设置有接近传感器以便检测锁定构件的位置。为此,锁定构件在远离接近传感器的位置和靠近接近传感器的位置之间配备有可移动的目标部,该目标部的每个位置与锁定构件的位置之一相关联,使得当锁定构件从解锁位置移动到锁定位置时,接近传感器产生的电信号发生变化,反之亦然。检测到锁定构件处于锁定位置意味着捕获销已经将钩推到其自动锁定的保持位置,使得该检测也对应于保持可移动元件的间接检测。
5.然而,有时钩已被正确检测到处于其保持位置,但实际上捕获销并没有被钩保持,因为钩的部分破损,阻止了它保持捕获销。在这些异常情况下,检测到钩处于保持位置并不能保证可移动元件实际上已被保持。
6.文献wo2018/189299建议为外壳提供第二接近传感器,以在钩处于其保持位置时检测捕获销是否实际存在于钩中。为此,第二目标部由指示器杆承载,该指示器杆被捕获销本身推回,并且如果捕获销不在钩中,则该指示器杆将第二目标部放置在远离传感器的位置,并且如果在保持位置中捕获销在钩中,则放置在靠近第二传感器的位置。因此,如果第一传感器指示锁定构件处于锁定位置并且如果第二传感器指示捕获销实际上存在于钩中,则认为可移动元件被有效地保持。这种布置必然涉及使用两个传感器的稳健性较低,并且需要进行两个信号的逻辑组合。
7.同一文献建议仅使用一个接近传感器,通过将其放置在上位锁上,使得能够检测分别链接到锁定构件和指示器杆的两个目标部附近同时存在,如果锁定构件和钩处于锁定位置并且如果捕获销存在于钩中,两个目标部才接近该接近传感器。然而,通过同一传感器同时检测若干接近目标部难以控制,并且可能会产生错误检测。
技术实现要素:
8.本发明的目的是提供一种上位锁,其使得能够以可靠的方式检测处于保持位置的
钩和在钩中存在捕获销,而不需要数字化处理或精细的多目标部控制。
9.为了实现该目的,提出了一种用于选择性地保持可移动元件的捕获销的上位锁,该上位锁包括:
[0010]-钩,该钩在用于可移动元件的捕获销的释放位置和保持位置之间可移动;
[0011]-锁定构件,锁定构件与钩相互作用并且在锁定位置和解锁位置之间可移动,在锁定位置中,它将钩固定在保持位置,在解锁位置中,钩在可移动元件的捕获销的作用力下自由位移;
[0012]-检测装置,检测装置适用于检测其中钩处于保持位置并且捕获销存在于钩中的情况。
[0013]
根据本发明,检测装置包括传感器和目标部,它们在接近位置和一个或多个彼此远离的位置之间相对于彼此可移动,目标部或传感器中的一个由锁定构件承载,而目标部或传感器中的另一个由指示器杆承载,指示器杆与捕获销相互作用并且在指示钩中没有捕获销的第一位置和指示钩中存在捕获销的第二位置之间可移动,使得如果锁定构件处于锁定位置并且如果指示器杆处于指示钩中存在捕获销的第二位置,目标部和传感器只能处于接近位置。
[0014]
当指示两个元件相互作用时,在此应当理解意指一个元件的运动直接或经由一个或多个中间元件引起另一个元件的运动。因此,根据本发明的规定,只有目标部和传感器处于接近位置才修改来自传感器的信号,这仅可能在两个期望的条件同时满足时发生,即钩处于保持位置并且钩中存在捕获销。因此根据本发明产生逻辑和机械功能,其具有的优点是仅使用一个目标部和一个传感器并且不需要任何数字化处理。
[0015]
在本发明的特定方面,指示器杆可枢转地安装在上位锁上。根据特定布置,指示器杆和钩可枢转地安装在同一枢轴上。
附图说明
[0016]
鉴于参照附图对本发明的特定实施例进行的以下详细说明将更好地理解本发明,附图中:
[0017]
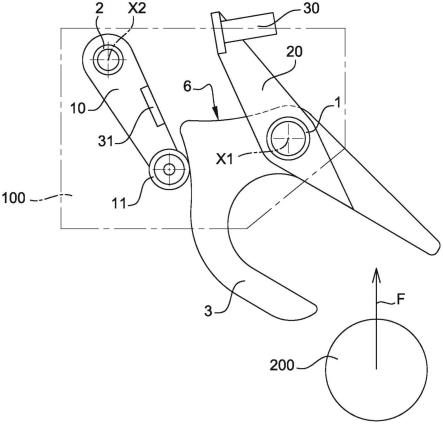
[图1]图1是根据本发明的第一特定实施例的上位锁的示意性前视图,示出了在钩处于释放位置时,可移动元件的捕获销接近钩;
[0018]
[图2]图2是类似于图1的视图,示出了钩处于锁定位置,而捕获销实际上被钩保持;
[0019]
[图3]图3是类似于图1的视图,示出了处于锁定位置的钩,同时捕获销在钩的一部分断裂后从钩中释放;
具体实施方式
[0020]
参考附图,本发明的上位锁包括板100,板100承载限定了平行的枢转轴线x1和x2的第一枢轴1和第二枢轴2。钩3围绕轴线x1枢转地安装在第一枢轴1上,以便在图1所示的释放位置和图2和图3所示的保持位置之间枢转,通过弹簧(未示出)将钩朝向释放位置推压。钩3包括钩部分5,其中可移动元件201(例如飞行器起落架或货舱门)的捕获销200旨在由上位锁保持,以固定可移动元件(例如在起落架的缩回位置,或在货舱门的闭合位置)。为此,
可移动元件由操纵致动器位移,并且捕获销200跟随轨迹f,其将钩3推向其中它保持捕获销200的锁定位置。为此目的,锁定构件10被枢转地安装在围绕轴线x2的第二枢轴2上并且包括滚子11,滚子11永久地承载在钩3的凸轮轮廓6上。锁定构件10在图1所示的解锁位置和图2和3所示的锁定位置之间枢转,其中它由弹簧(未显示)自动返回,并且当钩3到达保持位置时它自动到达。在锁定位置,锁定构件10将钩3锁定在保持位置。为了释放捕获销200,解锁致动器(未示出)将锁定构件10推向解锁位置,这使得钩3能朝释放位置枢转并且因此使得捕获销200能够离开钩3。
[0021]
上位锁还包括指示器杆20,在这种情况下,指示器杆20围绕轴线x1枢转地安装在第一枢轴1上,并且在图2中所示的指示捕获销200存在于钩3中的位置和在图1和图3中所示的指示在钩3中没有捕获销200的位置之间可移动,在图2中所示的位置中,当捕获销200接近钩3时,它被捕获销200推回,通过弹簧(未示出)将指示器杆20朝向图1和图3中所示的位置推压。
[0022]
上位锁还包括在此由指示器杆20承载的接近传感器30和由锁定构件10承载的目标部31。接近传感器30和目标部31在如图2所示的接近位置和图1和3中所示的一个或多个远离位置之间相对于彼此可移动。接近传感器30产生电信号,当目标部31和接近传感器30从相对于彼此的位置通过时,其特性改变,这使得能够在目标部31相对于接近传感器30的两个位置之间进行区分。
[0023]
本发明的上位锁的功能如下。图1中示出了初始情况,其中钩3处于释放位置,锁定构件10处于其解锁位置,并且指示器杆20处于指示钩3中没有捕获销的位置。在该位置中,接近传感器30和目标31彼此远离。然后操作可移动元件以接近其固定位置。捕获销200然后在f方向上移动并将钩3推向保持位置,并将指示器杆20推向指示钩3中存在捕获销200的位置。当钩3到达保持位置时,锁定构件10自动放置在锁定位置以将钩3锁定在保持位置,同时指示器杆20被推回到指示钩中存在捕获销的位置中。在图2所示的该位置,接近传感器30和目标部31彼此接近,使得来自接近传感器30的信号改变,这使得能够确定捕获销200已被钩正确地保持。
[0024]
可能的情况是钩3断裂并且不再保持捕获销200。在图3所示的这种情况下,捕获销200已经离开钩3(例如在重力的作用下),同时钩3仍然固定在保持位置。这样做时,指示器杆20在其复位弹簧的作用下返回到指示钩中没有捕获销的位置,使得目标部31远离接近传感器30移动。来自第二传感器的信号改变,表明捕获销200不再被钩3保持,尽管钩3保持固定在保持位置。
[0025]
因此并且根据本发明的基本特征,如果同时钩3被锁定在保持位置并且如果捕获销200实际上存在于钩中,则目标部31只能到达靠近接近传感器30的位置。本发明的设置使得能够实现逻辑功能和机械功能,只需要使用一个目标部和一个传感器。
[0026]
本发明不限于刚刚描述的内容,而相反地涵盖落入由权利要求限定的范围内的任何变型。
[0027]
特别地,虽然本文已经描述了与专用目标部协配的接近传感器的使用,但是也可以使用其它技术,比如微型开关或光学传感器。在这种情况下,目标部将直接是锁定构件或不承载传感器的指示器杆的目标部。
[0028]
尽管在此传感器由指示器杆承载而目标部由锁定构件承载,但当然可以通过使传
感器由锁定构件承载而目标部由指示器杆承载来颠倒这种布置。
[0029]
尽管在此指示器杆可枢转地安装在与钩相同的枢轴上,但指示器杆可以可枢转地安装在另一个枢轴上,例如锁定构件的枢轴或任何其它枢轴。更一般地,尽管已经指出指示器杆是枢转安装的,但它可以通过与捕获销相互作用而可移动,使得它具有至少一个相对地接近锁定构件的位置,以及一个或多个相对地远离锁定件的位置。
[0030]
当然,为了确保冗余,可以使用第二传感器/目标组件,如果需要,可以使用第二指示器杆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1