飞行装置及其控制方法和控制装置与流程
1.本公开涉及一种根据方案1的用于控制飞行装置的方法,并且涉及一种根据方案8的用于控制飞行装置的飞行的控制装置。本公开还涉及一种飞行装置,该装置包括根据本公开的控制装置。
背景技术:
2.从现有技术已知具有多个驱动单元的飞行装置。垂直起飞和降落的飞行装置,也称为vtol,尤其包括多个驱动单元。
3.在此,尤其从de 10 2012 202 698a1已知具有多个驱动单元和多个旋翼的垂直起飞和降落的飞行装置。
4.这种飞行装置通常包括至少一个用于飞行控制的控制装置,例如以飞行控制计算机形式的控制装置,飞行员将控制信号输入到该控制装置中,以便将其置于定义的飞行运动中。在此,控制信号包括飞行装置的指令运动(commanded movement)。通过用于飞行控制的控制装置基于控制信号,来确定由驱动单元、特别是电驱动单元引起相应运动所必需的推力分布。为了实现期望的飞行运动,也可以操纵诸如方向舵或副翼之类的致动器。
5.为了操纵飞行装置,尤其需要使得飞行装置的方向改变的横向运动。不同类型的横向运动,特别是在飞行装置的转弯速率方面有所不同。如果转弯速率不等于零,则其大小表示飞行装置在转弯飞行期间在定义的时间段内飞过的角度范围。如果转弯速率为零,则飞行装置的横向运动包括纯横向平移运动。
6.在已知方法中,飞行员的任务是基于当前空速(airspeed)来决定要设定哪个转弯速率,并将用于飞行控制的相应信号输入控制装置。
7.从us 2018/0244369 a1中已知这种飞行控制器。它包括操纵杆形式的输入单元,其除了主输入之外还包括次输入。主输入的目的是通过输入滚转角将飞行装置置于没有转弯速率的横向运动中,而次输入的目的是在转弯飞行期间为飞行装置设置定义的转弯速率。现有技术中确定的转弯速率取决于必须由飞行装置的传感器捕获的空速。空速越大,转弯速度越低,反之亦然。
8.先前已知的控制器的缺点在于需要来自飞行员的多个输入以便能够利用飞行装置执行不同类型的横向运动。还需要用于获取空速的传感器,飞行员根据该传感器决定应设置的转弯速率。然而,所述传感器容易出错,并且获取昂贵。
技术实现要素:
9.因此,本公开的目的是简化用于控制的方法以及飞行装置的控制,并降低飞行装置的制造成本。
10.该目的通过根据方案1的方法来实现。在从属方案2至7中找到实施例的有利形式。该目的还通过根据方案8的控制装置来实现。根据本公开的控制装置的实施例的有利形式在方案9和10中找到。如方案11和12所述的根据本公开的飞行装置也实现了本公开的目的。
为了避免重复,特此通过引用将这些方案明确地包括在说明书中。
11.在根据本公开的用于控制飞行装置的方法中,该飞行装置具有多个驱动单元、特别是电驱动单元以及具有用于飞行控制的控制装置,至少一个横向控制信号被输入到该控制装置中以启动飞行装置的横向运动。
12.对于根据本公开的方法而言重要的是,通过速度估计来确定飞行装置的速度,并且根据估计的空速v
est
和横向控制信号,特别是指令滚转角(commanded roll angle),来计算转弯速率,然后通过输入横向控制信号而计算的转弯速率来自动启动横向运动。
13.本公开是基于申请人的知识而建立的,即对空速的估计以及对计算的转弯速率的自动确定和设置,使得对飞行装置的控制较少受到干扰或故障的影响。
14.因此,本公开在以下方面不同于先前已知的方法:根据本公开对空速进行估计发生在没有潜在故障传感器的情况下,特别是在没有诸如皮托管或普朗特管的流量传感器的情况下。用于飞行控制的控制装置能够基于估计的空速来确定飞行员想要通过横向控制信号的输入引起哪种类型的横向运动。特别地,飞行员不必将两种或更多种类型的横向控制信号输入到用于飞行控制的控制装置中。而是仅需要一个控制元件,通过该控制元件例如以指令滚转角的形式将横向控制信号输入到控制装置中以进行飞行控制。横向控制信号还可以可替代地激活其他致动器,例如副翼,例如副翼可以影响滚转角。
15.速度的估计可以基于物理模型进行,例如以飞行装置的运动微分方程的形式。运动微分方程优选地基于作用在飞行装置的空间分布结构上或重心的建模力或扭矩的平衡。运动微分方程的术语在此可以包括空速或空速的数学导数。可以通过求解运动微分方程来估计空速,从而可以完全省去通过其获取测量值的传感器,从该传感器中可以直接确定传统上的空速。
16.运动微分方程的求解优选地通过已知的数值解法来确定,例如,euler或runge
‑
kutta的数值解法,其在用于飞行控制的控制装置中实现。在本公开的范围内,必须根据运动微分方程的类型来选择合适的求解方法。在本公开的范围内,使用用于估计空速的算法,其中基于人工智能方法,例如以合成神经网络的形式来估计速度。
17.在该方法的一种有利实施例中,根据指令俯仰角(commanded pitch angle),尤其是根据阻力系数来确定空速。
18.俯仰角指示飞行装置相对于其水平轴是否倾斜以及倾斜到什么程度。然而,通过俯仰角的倾斜,电驱动单元的总推力的作用方向也被倾斜。结果,驱动力承受水平推力分量和垂直推力分量。为了使飞行装置不损失高度,调整总推力以使特定的垂直推力分量作用在飞行装置的重量上。
19.下面根据在水平面内的飞行,即不改变高度来描述本公开。在此假设,推力被调节,以便对沿z轴的位置变化进行补偿。z方向上的力得以平衡,因为向下作用的飞行装置的重量由推力矢量的z分量(特定的垂直推力分量g)补偿。
20.当然,在高度变化的情况下进行飞行的飞行装置也在本公开的范围内。在这种情况下,必须以适当的角度调整公式。
21.通过与指令俯仰角的三角关系,水平力分量的分量可以被结合到飞行装置的模型中,特别是运动微分方程。因此,空速的估计取决于指令俯仰角。然后,所述水平力分量对应于g tan(θ
c
),其中g是特定的垂直推力分量,而θ
c
是飞行装置的指令俯仰角。
22.根据该有利的改进,在速度估计中考虑了作用在飞行装置的飞行运动的空气阻力。空气阻力可以通过以下公式表示:
[0023][0024]
此处,ρ是空气密度,a是沿空速矢量观察的、飞行装置的有效横截面,c
w
是阻力系数,以及v是沿空速矢量的、飞行装置与空气之间的相对速度。对于飞行高度的微小变化而言,空气密度几乎恒定。在这种情况下,阻力系数、横截面和该密度可以与飞行装置的质量一起组合成阻力系数通过合并f
l
,可以提高估计的准确性。如果简化了空气阻力的计算,则可以采用以下运动微分方程来估算空速:
[0025]
其中
[0026]
在此,是估计的飞行加速度,g是特定的垂直推力分量,θ
c
是指令俯仰角,是阻力因子,以及v是沿着空速矢量的、飞行装置与空气之间的相对速度。
[0027]
在另一个有利的实施例中,所计算的转弯速率在空速为零的第一阈值速度v0以下为零,从而开始平移运动。
[0028]
申请人的调查表明,飞行控制中存在操纵,其特征在于低空速和等于或接近于零的转弯速率。着陆进场或在悬停过程中保持静止位置就是这样的例子。在这种操纵中,有利地指定了空速与期望的横向运动的类型之间的关系。
[0029]
在该方法的实施例的一个优选形式中,当输入指令滚转角时,飞行装置仅执行低于第一阈值速度v0或以第一阈值速度v0的横向平移运动。为此,可以在用于飞行控制的控制装置中指定第一阈值速度v0,并且在飞行期间将其与估算的空速进行比较。如果估算的空速等于或低于第一阈值速度,则转弯速度将自动设置为零值。
[0030]
在该方法的一个优选实施例中,提供了第二阈值速度v
coor
。在第一阈值速度v0和第二阈值速度v
coor
之间的速度范围内,根据第一阈值速度v0和第二阈值速度v
coor
调整用于协调转弯飞行的计算的转弯速率,以便不超过飞行装置的允许的转弯速率阈值。
[0031]
转弯速率通常是飞行控制系统的输入参数。控制装置通常是飞行控制系统的一部分。飞行控制系统或飞行控制器通常也将飞行员输入解释为转弯速率。该系统随后将其转换为偏航角速率。
[0032]
如果估计的空速超过下限阈值速度v0,则飞行员通过横向信号的输入增加期望进行转弯飞行的机动次数。与横向平移运动相反,转弯飞行的特征在于弯曲半径。为了执行转弯飞行,可以在飞行装置上设置滚转角,使得电驱动单元的总推力的作用方向根据滚转角而至少具有朝向曲线内侧的分量。然而,在转弯飞行过程中会产生横向力,如果转弯协调无法抵消这些横向力,则会将飞行装置推出该曲线。在此,转弯协调可以包括降低转弯速率和/或调节飞行装置的偏航角速率,每一个都可以取决于命令滚转角而发生。
[0033]
以下力平衡适用于没有横向力的协调的转弯飞行:
[0034]
[0035]
在此,是飞行装置的转弯速率,v是飞行装置的空速,θ是飞行装置的俯仰角,g是特定的垂直推力分量,φ是飞行装置的滚转角。
[0036]
在协调的转弯飞行中,优选将以下定律与上述公式相关联:在低空速时,飞行装置的确定的转弯速率会急剧上升。由于飞行装置的物理受限的可操纵性,然而,要设定的转弯速率不能任意高,并且必须低于转弯速率阈值。转弯速率阈值例如可以取决于如何实现飞行装置的协调的转弯飞行而得出。如果这以某种方式可以包括调节飞行装置的偏航姿态,则转弯速率阈值可以取决于偏航角速率阈值,而该偏航角速率阈值又取决于飞行装置的驱动单元的性能。
[0037]
因为减小了计算的转弯速率,可以防止在转弯飞行中超过转弯速率阈值。这优选地以系数或校正的形式进行,当通过用于飞行控制的控制装置计算出该系数或校正时,该转弯速率被降低。从而改善了第一阈值速度v0和第二阈值速度v
coor
之间的速度范围内的动态飞行特性。
[0038]
在该方法的一种有利的实施方式中,当空速超过第二阈值速度v
coor
时,以计算的转弯速率启动飞行装置在协调的转弯飞行中的横向运动。
[0039]
如果空气速度超过第二阈值速度v
coor
,则可以在不降低转弯速率的情况下进行转弯协调。在此有利的是,飞行装置的操纵不必限制在第一阈值速度v0以上,因为没有超过转弯速率阈值。由此改善了飞行装置在转弯飞行中的操纵性能。
[0040]
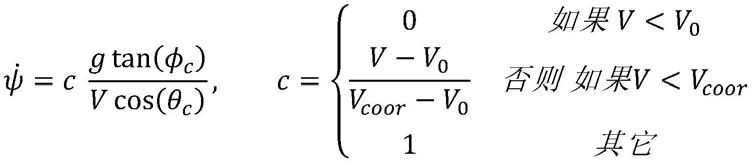
在该方法的一种有利的实施方式中,转弯速率是根据以下公式计算的:
[0041][0042]
在此,是转弯速率,c是速度相关的控制参数,g是特定的垂直推力分量,φ
c
是指令滚转角,θ
c
是指令俯仰角。v是估计的空速,v0是第一阈值速度,v
coor
是第二阈值速度。
[0043]
申请人进行的实验和仿真研究表明,取决于飞行装置的各个飞行特性,有利地进行第一阈值速度v0和第二阈值速度v
coor
的规定。结果,可以在考虑到针对飞行装置进行调整的可靠的转弯速率的情况下,定义用于确定转弯速率的速度范围。通过阈值速度的规定,以简单的方式发现了速度相关的控制参数c,该速度相关的控制参数c可以容易地实现并且可以在用于飞行控制的控制装置中仅花费很少的努力就根据不同飞行装置的不同飞行特性进行调整。
[0044]
在一个有利的实施例中,通过与外部输入的偏移来改变所计算的转弯速率,优选地通过飞行员的手动输入来进行转弯速率校正和/或转弯速率的目标值的输入。
[0045]
如果确定的转弯速率低于最大允许转弯速率,则,如果飞行员可以通过外部输入改变转弯速率,则可以提高飞行装置的可操纵性。在此,在飞行装置的每个速度范围,通过外部输入来改变转弯速率都是有利的。
[0046]
在此,转弯速率校正表示可以添加到已经确定的转弯速率上的附加转弯速率的值。由此,控制装置确定用于调节相应的飞行运动的新的转弯速率。这可以包括对其他变量
(例如偏航高度)的改变。
[0047]
除转弯速率校正外,协调的转弯飞行中的转弯速率可以通过转弯速率的目标值进行覆盖。在此,可以通过外部输入来确定要设定的转弯速率,而不会抵消已经确定的转弯速率。这里,目标值是一个可以直接设置的值,必要时可考虑转弯速率阈值。
[0048]
本公开的目的还通过根据方案8的用于飞行装置的飞行控制的控制装置来实现。
[0049]
如本身已知的,根据本公开的用于具有多个电驱动单元的飞行装置的飞行控制的控制装置被设计成接收至少一个横向控制信号,以便引入飞行装置的横向运动。
[0050]
重要的是,控制装置被设计为通过速度估计来确定飞行装置的速度,以根据估计的空速v
est
和指令滚转角来计算所计算的转弯速率,并通过横向控制信号的输入来以计算的转弯速率自动启动横向运动。
[0051]
根据本公开的控制装置还具有根据本公开的方法或根据本公开的方法的实施例的优选形式之一的上述优点。
[0052]
用于飞行控制的控制装置例如可以以中央飞行控制计算机的形式实现,其目的是接收飞行员输入并将它们转换成相应的控制信号,利用该控制信号来驱动飞行装置的致动器。然而,同样在本公开的范围内,飞行控制器也至少部分地设计为电传操纵系统(fly
‑
by
‑
wire system)。可替代地或附加地,飞行控制器可以主动地连接到非中央控制单元,例如以独立实施的控制器或地面上的非中央计算单元的形式。
[0053]
在一种有利的改进方案中,可以通过手动输入来输入转弯速率校正和/或转弯速率的目标值,以便改变计算的转弯速率。
[0054]
手动输入转弯速率校正和/或转弯速率目标值都可以通过一个输入元件进行,横向信号也可以通过该输入元件输入到用于飞行控制的控制装置中,但是可替换地也可以通过第二输入元件进行输入。该输入可以包括转弯速率的数字输入,该转弯速率的数字输入被用于飞行控制的控制装置立即采用以启动横向运动。在此,优选地,用于飞行控制的控制装置确保通过实施已经输入的附加转弯速率或转弯速率目标值,使得最大允许转弯速率不被超过。
[0055]
在另一有利的改进方案中,控制装置被设计成不具有用于测量速度的流体机械传感器。
[0056]
已知的用于飞行装置的控制装置配备有流体机械传感器,通过该流体机械传感器可以确定空速。然而,所述流体机械传感器仅允许间接确定空速:特别是皮托管(pitot tube)/普朗特管(prandtl tube)容易出错,并且需要将压差计算转换为空速计算。
[0057]
通过根据本公开的用于估计用于飞行控制的控制装置中的速度的估计方法的实施方式,可以完全省略用于确定速度的传感器信号。
[0058]
尽管如此,在本公开的范围内,控制装置可以连接到其他传感器。这些其他传感器例如包括加速度传感器、用于环境值的传感器(例如风速传感器),或高度计。
[0059]
本公开的目的还通过具有根据本公开如上所述的控制装置的垂直起飞和降落的飞行装置或根据本公开的控制装置的实施例的优选形式来实现。
[0060]
飞行装置优选地被实现为电驱动飞行装置。如申请人的de 10 2012 202698a1中所描述的,已知的电驱动垂直起飞和降落的飞行装置具有比常规飞行装置更大的可操纵性。例如,可以执行纯平移运动和协调控制转弯飞行。
[0061]
飞行装置优选地包括多个电驱动单元,优选地包括用于多个转子的多个电驱动单元。特别优选地,转子基本上布置在一个平面中。
[0062]
该飞行装置优选地被设计为载人飞行装置,特别是用于自动地或在与该装置一起飞行的飞行员的控制下的人员运输。该飞行装置还可以被设计成用于在远程控制下或自主地进行负载的运输。
附图说明
[0063]
下面参照实施例和附图说明根据本公开的方法以及根据本公开的控制装置以及根据本公开的飞行装置的实施例的其他优选特征和形式。示例性实施例和引用的尺寸仅是本公开的有利实施例,而不是限制性的。
[0064]
图1示出了多轴直升机的侧视图;
[0065]
图2示出了在转弯飞行中多轴直升机的正视图;
[0066]
图3示出了在转弯飞行中多轴直升机的平面图;
[0067]
图4示出了根据估计的空速和飞行装置的滚转角而计算出的转弯速率的曲线图;
[0068]
图5示出了用于执行用于飞行装置的横向控制的方法的流程图。
具体实施方式
[0069]
图1示出了飞行装置,在当前情况下是多轴直升机1,该飞行装置具有电驱动单元2,为了清楚起见,仅这两个部件被给出相应的附图标记。多轴直升机1包括飞行控制计算机(fcc)3,其被连接以与驱动单元2和输入装置(未示出)进行信号传递。
[0070]
通过用于操纵多轴直升机1的、输入到输入装置中的指令飞行员输入(commanded pilot input),飞行员输入作为控制信号被传送至fcc 3。fcc 3根据该控制信号确定驱动单元2的推力分布,以便多轴直升机1执行与指令飞行员输入相对应的运动。
[0071]
为了设置具有速度矢量v的前向飞行,飞行员向fcc 3发出一个负俯仰角
–
θ。通过在驱动单元2处设置相应的推力分布,多轴直升机俯仰。结果,由驱动单元2产生的总推力就其角度分量而言被划分为特定的垂直推力分量g和水平分量
‑
g tan(θ)。特定的垂直推力分量g与重量(未示出)相对准。
[0072]
空气阻力与飞行装置的速度矢量相反,并导致多轴直升机1制动。是空气阻力的近似值,其中是单独的、特定的空气阻力系数,而v对应于速度矢量的振幅。通过根据d'alembert原理在水平方向上对力进行平衡,多轴直升机的运动方程式如下:
[0073]
其中
[0074]
在此,对应于估计的加速度,v对应于估计的空速,对应于特定的空气阻力系数,g对应于特定的垂直推力分量,而θ
c
对应于指令俯仰角。通过数值解法在fcc 3中找到公式的解,以便确定估计的空速v。
[0075]
图2示出了在转弯飞行中从正面观察的多轴直升机1。该多轴直升机1与图1所示的相同。
[0076]
为了进行横向运动,飞行员(未示出)将指令滚转角φ
c
(未示出)形式的横向信号
输入到多轴直升机1的fcc中。基于指令滚转角φ
c
,在fcc中确定驱动单元2的偏移分布,通过该分布来改变多轴直升机1的实际滚转角φ,并由此也改变多轴直升机1的特定的总推力s=g/cos(φ)/cos(θ)所沿的方向。考虑到垂直推力分量,则总推力s的水平分量为g tan(φ)/cos(θ)。
[0077]
离心力与水平分量g tan(φ)/cos(θ)相反。此处是指通过转弯角ψ飞过所述曲线时多轴直升机1的转弯速率。
[0078]
下面的公式描述了协调的转弯飞行中的力关系,它是由水平方向上对力进行平衡得出的。
[0079][0080]
图3示出了在转弯飞行中多轴直升机1的平面图。多轴直升机1与图1和图2所示相同。
[0081]
通过根据图2调节滚转角来在曲线路径5上飞来飞去。多轴直升机1在此处通过角ψ的一部分,其中多轴直升机1的运动由转弯角来描述。离心力由转弯角和速度v产生,其与飞行曲线5相切。
[0082]
在转弯飞行中的已知影响称为打滑,其中将多轴直升机1从飞行曲线5中推出。打滑是由于横向力而产生的,在所示的示例性实施例中,可通过对多轴直升机1的驱动单元的适当控制来补偿横向力。在所示的多轴直升机1中,调节是通过调整飞行装置的转弯速率来进行的。然而,由于多轴直升机1具有转弯速率阈值,因此这不能任意改变。该最大允许转弯速率作为阈值存储在fcc中,并且在飞行期间在调整多轴直升机的允许方向时将其考虑在内。
[0083]
如果针对重新布置以下公式:
[0084][0085]
则,可以看到低空速v时的转弯速率相应地增加,因此在缓慢转弯飞行期间,不一定总能足够快地将转弯速率阈值考虑在内进行重新调整。因此,阈值被存储在多轴直升机1的fcc中,考虑到空速,利用该阈值进行转弯飞行的协调。
[0086]
转弯速率的计算是在以下基础上进行的:
[0087][0088]
在此,v0是较低的第一阈值速度,低于该第一阈值速度,飞行装置不进行转弯运动,而是进行纯横向平移运动。如所述的,在转弯速率的计算中,这由系数c反映,当速度降至低于第一阈值速度时,该系数设置为零。v
coor
是上限第二阈值速度。
[0089]
如果估计的空速v
est
在第一阈值速度v0和第二阈值速度v
coor
之间,则计算协调的转弯飞行中的所需转弯速率以便最大允许转弯速率阈值没有被超过。相对于第二阈值速度v
coor
和第一阈值速度v0之间的差来设置估计的空速v
est
和第一阈值速度v0之间的差,以计算系数c。结果,转弯速率被减小,以便转弯速率阈值、进而与其对应的偏航角速率阈值没有被超过。通过实验和仿真确定多轴直升机的第一阈值速度v0和第二阈值速度v
coor
的大小。
[0090]
然而,如果在转弯飞行过程中计算出转弯速率,此时转弯速率低于允许的转弯速率阈值,则可以通过定向飞行员技术参数来抵消所确定的转弯速率。由此得出的参考变量为
[0091]
参照根据图4的曲线图,示出了根据空速v实现飞行协调的方式。
[0092]
估计的空速v绘制在图示曲线图的水平轴上,而垂直轴表示将被确定的转弯速率第一阈值速度v0和第二阈值速度v
coor
将水平轴的区域划分为第一速度区域i、第二速度区域ii和第三速度区域iii。
[0093]
如果五个示例性滚转角φ1,φ2,φ3,φ4,φ5之一被命令为针对转弯飞行,其中φ1<φ2<φ3<φ4<φ5适用,则通过以下公式可以得到自动计算的转弯速率
[0094][0095]
其中,该转弯速率既用于纯平移运动,又用于协调的转弯飞行。如果计算的转弯速率低于最大转弯速率阈值该计算的转弯速率不超过飞行装置的转弯速率阈值,则可以通过改变滚转角来提高转弯速率,因为滚转角被增加了,例如,从φ1到φ2。
[0096]
图5示出了用于飞行装置的横向控制的示意性方法流程的示例性实施例,根据该示意性方法流程,该控制装置在根据图1
‑
3的多轴直升机的fcc中实现。所示的示例性实施例包含速度估计6,该速度估计6是基于运动微分方程的解而获得的。
[0097]
其中
[0098]
为此目的,基于空气阻力系数和指令俯仰角θ
c
来确定速度。由此得出的估计的空速v用于在转弯速率计算7中计算转弯速率,该转弯速率计算7对应于图4的描述。转弯速率由此产生,该转弯速率可以通过飞行员8的定向输入进行调节。结果,发现被覆盖的转弯速率用其控制多轴直升机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1