柔性桁架系统和使用这种系统转移柔性复合零件的方法与流程
柔性桁架系统和使用这种系统转移柔性复合零件的方法
背景技术:
1.现代飞行器使用各种复合零件,这些复合零件又大又柔软。这些零件在其加工、组装和其他操作期间的处理可能非常有挑战性。常规方法涉及手动处理这些零件。然而,手动处理要求多个操作员在不同的位置处同时支撑零件。更重要地,必须仔细地协调多个操作员的作用力以防止在零件上的一些区域中的支撑不足和/或在其他区域中的应力过大。这样的协调(涉及多个操作员)很难实现。另一方面,即使短暂的一刻,缺乏协调也可能损坏零件。此外,专用于零件的支撑固定装置的制作、使用、存储和处理是昂贵的。
2.所需要的是用于转移柔性复合零件的新方法和系统。
技术实现要素:
3.本文所描述的是柔性桁架系统和使用这些系统转移柔性复合零件的方法。柔性桁架系统包含柔性桁架机构和复合拾取放置机构,该复合拾取放置机构被支撑在柔性桁架机构上并被设计成附接至各种复合零件。该柔性桁架机构包含柔性细长构件和耦接至每个柔性细长构件的可滑动肋。具体地,每个肋可滑动地耦接至至少一个柔性细长构件。在一些示例中,每个肋还固定地耦接至另一个柔性细长构件。该可滑动的耦接允许柔性桁架机构弯曲并遵循被支撑的零件的形状,使得复合拾取放置机构能够接触和支撑复合零件的不同区域。这样一来,相同的柔性桁架机构能够支撑具有不同形状的柔性复合零件。
4.在一些示例中,柔性桁架机构包含沿着柔性桁架机构的主轴线延伸的柔性细长构件、耦接至每个柔性细长构件并相对于彼此支撑柔性细长构件的可滑动肋。可滑动肋沿着柔性桁架机构的主轴线彼此隔开。可滑动肋被配置为接收并支撑一个或多个复合拾取放置机构。每个可滑动肋可滑动地耦接至至少一个柔性细长构件,从而允许每个可滑动肋相对于至少一个柔性细长构件沿着主轴线滑动并允许柔性细长构件垂直于主轴线绕至少一个轴线弯曲。
5.在一些示例中,柔性桁架系统包含柔性桁架机构,该柔性桁架机构包含沿着柔性桁架机构的主轴线延伸的柔性细长构件以及耦接至每个柔性细长构件和拾取放置机构的可滑动肋。每个拾取放置机构由可滑动肋中的对应一个支撑。每个可滑动肋可滑动地耦接至至少一个柔性细长构件,从而允许每个可滑动肋相对于至少一个柔性细长构件沿着主轴线滑动并允许柔性细长构件垂直于主轴线绕至少一个轴线弯曲。
6.在一些示例中,提供一种使用柔性桁架系统转移柔性复合零件的方法,该柔性桁架系统包含柔性桁架机构和拾取放置机构。该方法包含使柔性复合零件与支撑在柔性桁架机构上的每个拾取放置机构接触。柔性桁架机构包含柔性细长构件和可滑动肋,这些可滑动肋耦接至每个柔性细长构件并相对于彼此支撑柔性细长构件。该方法还包含接触柔性复合零件,其包含相对于至少一个柔性细长构件滑动至少一个可滑动肋,从而允许柔性细长构件弯曲并允许每个拾取放置机构与柔性复合零件形成接触。该方法还包含将可滑动肋相对于至少一个柔性细长构件锁定在设定位置,从而保留柔性细长构件的形状并维持每个拾取放置机构与柔性复合零件之间的接触。该方法还包含在维持每个拾取放置机构与柔性复
合零件之间的接触的同时使用柔性桁架系统转移柔性复合零件。
附图说明
7.图1a 是根据一些示例的包含柔性桁架机构和拾取放置机构的柔性桁架系统的示意图。
8.图1b是根据一些示例的图1a中的柔性桁架系统的一部分的示意图,其示出柔性桁架机构和复合拾取放置机构的各种细节。
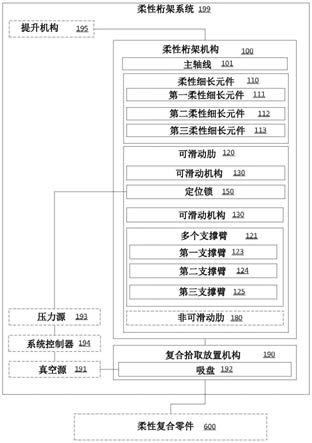
9.图1c是根据一些示例的表示柔性桁架系统的框图。
10.图1d是根据一些示例的柔性桁架机构的一部分的示意图。
11.图2a和图2b是根据一些示例的弯曲前(图2a)和弯曲后(图2b)的包含两个可滑动肋的柔性桁架机构的示意图。
12.图2c和图2d是弯曲前(图2c)和弯曲后(图2d)的包含两个可滑动肋和一个固定肋的柔性桁架机构的另一示例的示意图。
13.图3a是根据一些示例的柔性桁架机构的滑动机构的示意图。
14.图3b是根据一些示例的图2b中的滑动机构在移除了滚轴支撑的情况下的示意图。
15.图4a是根据一些示例的柔性桁架机构的定位锁的示意图。
16.图4b是根据一些示例的处于轴接合位置的切口螺母和带螺纹定位轴的示意图。
17.图4c是根据一些示例的处于轴脱离位置的切口螺母和带螺纹定位轴的示意图。
18.图5是根据一些示例的对应于使用柔性桁架系统转移柔性复合零件的方法的过程流程图。
19.图6a是根据一些示例的在使柔性桁架系统的形状符合柔性复合零件之前定位在柔性复合零件上方的柔性桁架系统的示意图。
20.图6b是根据一些示例的在使柔性桁架系统的形状符合柔性复合零件之后定位在柔性复合零件上方的柔性桁架系统的示意图。
21.图6c是根据一些示例的在使柔性桁架系统的形状符合这种其他柔性复合零件之后定位在另一柔性复合零件上方的柔性桁架系统的示意图。
22.图7是对应于用于制造和维护飞行器的方法的过程流程图。
23.图8示出根据一些示例的示例飞行器的框图。
具体实施方式
24.在下面的描述中,为了提供对所提出概念的透彻理解,阐述了很多具体细节。在一些示例中,在无需这些具体细节中的一些或全部的情况下实践所提出概念。在其他实例中,众所周知的过程操作没有被详细描述,以便不必要地模糊所描述的概念。虽然将结合具体示例描述一些概念,但应理解,这些示例并非意图限制。
25.引言
26.如上所述,处理大型柔性零件可能有挑战性。常规方法涉及手动处理(例如,使用多个操作员)或定制工具(例如,被设计成符合特定形状)。然而,手动处理是耗时的并可能损坏零件(例如,如果操作员的移动不同步)。定制支持工具是昂贵的并且需要专用于每种类型的零件。同时,现代的飞行器使用许多独特的零件,这就要求许多个体支撑工具,导致
复杂的后勤问题(例如,回收、存储和成本)。
27.本文所描述的柔性桁架系统被配置为改变形状以向柔性复合零件提供充足的支撑,同时使用这些柔性桁架系统转移这些零件或以其他方式处理。特别地,柔性桁架系统包含柔性桁架机构和被支撑在柔性桁架机构上的复合拾取放置机构。复合拾取放置机构被配置为在零件转移期间接合柔性复合零件。柔性桁架机构被配置为改变形状,以便例如遵循柔性复合零件的形状。在一些示例中,柔性复合零件是未固化的复合零件。本领域普通技术人员将认识到未固化的复合零件比已固化的复合零件倾向于更具柔性。在一些示例中,柔性复合零件至少1米长或甚至至少2米长或甚至3米长。本领域普通技术人员将认识到更长的复合零件比对应的较短的那些倾向于具有更高的柔性。
28.这种形状改变被用于确保复合拾取放置机构在多个不同位置处接触柔性复合零件并向柔性复合零件提供充足的支撑。这种多位置支撑在柔性复合零件的转移期间是非常重要的。在一些示例中,柔性桁架机构被配置为固定新形状(例如,在转移期间维持该形状)以确保柔性复合零件的持续支撑。
29.通过柔性桁架机构的特别设计和结构特征提供这种改变形状的能力。具体地,柔性桁架机构包含柔性细长构件和可滑动肋。可滑动肋耦接至每个柔性细长构件。更具体地,每个肋可滑动地耦接至至少一个柔性细长构件。细长构件的柔性以及肋能够滑动的能力允许柔性桁架机构弯曲并改变形状。换句话说,相同的柔性桁架机构可以被配置为支撑具有不同形状的多个不同的复合零件。
30.因此,当柔性桁架机构被重新配置为支撑具有新形状的新复合零件时,这些肋能够相对于至少一个柔性细长构件滑动。这种滑动动作允许所有的柔性细长构件弯曲并再成形。然而,当这些肋相对于柔性细长构件被锁定到位时,桁架机构能够在例如柔性复合零件的转移期间维持该形状。重新配置柔性桁架机构的过程是可重复的。因此,相同的柔性桁架机构能够在各种不同的复合零件上使用。
31.柔性桁架机构和系统的示例
32.图1a是根据一些示例的包含柔性桁架机构100和拾取放置机构190的柔性桁架系统199的示意透视图。图1b是图1a中的柔性桁架系统199的一部分的示意透视图,其示出柔性桁架机构100的附加特征。最后,图1c是根据一些示例的柔性桁架系统199的框图,其示出柔性桁架系统199的各种其他部件以及这些部件之间的连接和关系。
33.拾取放置机构190被配置为支撑不同的柔性复合零件,上文列出了其各种示例。如下文进一步描述的,拾取放置机构190由柔性桁架机构100附接和支撑。参考图1c,在一些示例中,复合拾取放置机构190包含可控地连接至真空源191的吸盘192。在一些示例中,柔性桁架系统199的真空源191和其他部件(例如,用于致动定位锁150的压力源193)的操作由系统控制器194控制。在一些示例中,系统控制器194可通信地耦接至压力源193并被配置为选择性地从压力源193连接和断开每个可滑动肋120的定位锁150的线性致动器152。
34.在一些示例中,柔性桁架系统199包含用于支撑柔性桁架机构100的提升机构195。具体地,提升机构195用于特别大型且沉重的柔性复合零件。在一个示例中,提升机构195是机器人系统,该机器人系统包括被配置为支撑和移动柔性桁架机构的一个或多个机器人臂。
35.在一些示例中,柔性桁架机构100的每一个可滑动肋120支撑复合拾取放置机构
190中的对应一个。在其他示例中,柔性桁架机构100包含多个可滑动肋,其中一些可滑动肋具有附接至肋的拾取放置机构190,同时其他可滑动肋不具有附接至肋的复合拾取放置机构190,例如没有任何拾取放置机构。例如,图1d示出具有不带有复合拾取放置机构190的可滑动肋120的示例柔性桁架机构100。在一些示例中,复合拾取放置机构190可以附接至每隔一个可滑动肋120。在其他示例中,复合拾取放置机构190以其他间隔来附接,包括例如以每隔两个可滑动肋120或每隔三个可滑动肋120的间隔。如上所述,在其他示例中,拾取放置机构190被附接至柔性桁架机构100中的每个可滑动肋190以形成例如如图1a和图1b所示的柔性桁架系统199。在其他示例中,在没有拾取放置机构190的情况下使用柔性桁架机构100,例如执行其他不涉及处理复合零件的操作。
36.参考图1a、图1b和图1d,柔性桁架机构100包含沿着柔性桁架机构100的主轴线101延伸的柔性细长构件110。附图示出三个柔性细长构件110,例如,第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113。然而,柔性细长构件110的其他数量(例如,四、五、六等)也在本发明的范围内。柔性细长构件110的数量确定柔性桁架机构100的柔性以及由柔性桁架系统199提供的支撑(例如,对柔性复合零件的支撑)。在一些示例中,柔性细长构件110中的每一个由碳纤维形成。碳纤维具有低重量,是充足柔性的并且提供显著的结构支撑,尤其是在沿着主轴线101的方向上。柔性细长构件110的长度(沿着主轴线101)由柔性桁架系统199被设计成支撑的最长复合零件的长度确定。在一些示例中,柔性细长构件110的长度至少约1米、至少约2米或甚至至少约5米。
37.参考图1a、图1b和图1d,柔性桁架机构100还包含可滑动肋120。具体地,图1a示出11个可滑动肋120,其沿着主轴线101定位在柔性细长构件110的相对端之间并彼此隔开。然而,肋的其他数量也在本发明的范围内。可滑动肋120耦接至每个柔性细长构件110并相对于彼此支撑柔性细长构件110。以下描述这些耦接的各种示例。
38.参考图1a和图1b,在一些示例中,可滑动肋120被配置为接收和支撑复合拾取放置机构190。在更具体的示例中,可滑动肋120中的每一个支撑复合拾取放置机构190中的对应一个(例如,复合拾取放置机构190附接至可滑动肋120的第一支撑臂123)。可替代地,在其他示例中,可滑动肋120中的至少一个不支撑复合拾取放置机构190中的任何一个,诸如图1d中所示的可滑动肋120。此外,在一些示例中,可滑动肋120中的至少一个支撑复合拾取放置机构190中的多个。在一些示例中,一个或多个复合拾取放置机构190附接至柔性细长构件110中的一个或多个。
39.参考图1d,在一些示例中,每个可滑动肋120包含多个支撑臂121。多个支撑臂121中的每一个至少部分地限定在对应的一对柔性细长构件110之间的距离。例如,第一支撑臂123在第一柔性细长构件111和第二柔性细长构件112之间延伸,或者更具体地,在可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112的滑动机构130之间延伸。第二支撑臂124在第一柔性细长构件111和第三柔性细长构件113之间延伸。在图示的示例中,第二支撑臂124固定地直接耦接至第三柔性细长构件113。第二支撑臂124也连接至滑动机构130,该滑动机构130可滑动地耦接至第一柔性细长构件111。最后,第三支撑臂125在第二柔性细长构件112和第三柔性细长构件113之间延伸。在图示的示例中,第三支撑臂125固定地直接耦接至第三柔性细长构件113。第三支撑臂125也连接至滑动机构130,该滑动机构130可滑动地耦接至第二柔性细长构件112。类似地,图1b示出可滑动肋120,其中每个可滑动肋120
包含多个支撑臂121(特别是第一支撑臂123、第二支撑臂12和第三支撑臂125)。
40.在一些示例中,多个支撑臂121中的每一个的长度是相同的。这样一来,第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113彼此之间以相同的距离定位。此外,在一些示例中,多个支撑臂121中的每一个都是笔直的。在一些示例中,支撑臂121由刚性材料(诸如铝)形成。
41.每个可滑动肋120可滑动地耦接至至少一个柔性细长构件110。例如,在这种可滑动耦接中,至少一个柔性细长构件110穿过每个可滑动肋120突出。在一些示例中,每个可滑动肋120可滑动地耦接至仅一个柔性细长构件110并固定地耦接至所有剩余的细长构件。可替代地,每个可滑动肋120可滑动地耦接至除一个以外的全部柔性细长构件110并固定地耦接至剩余的细长构件。在一些示例中,每个可滑动肋120可滑动地耦接至柔性细长构件110中的两个柔性细长构件并固定地耦接至一个剩余的细长构件。例如,图1a和图1b示出一个示例,其中每个可滑动肋120可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112中的每一个。在相同的示例中,每个可滑动肋120固定地耦接至第三柔性细长构件113。在一些示例中,每个可滑动肋120可滑动地耦接至所有的柔性细长构件110。如上所述,可滑动地耦接至柔性细长构件110中的至少一个允许柔性细长构件110绕垂直于主轴线101的一个或多个轴线(例如,图1d中所示的轴线102a和轴线102b)弯曲。例如,在一些示例中,主轴线101对应于y轴线,并且可滑动地耦接至柔性细长构件110中的至少一个允许柔性细长构件110绕轴线102b(对应于x轴线)和轴线102a(对应于z轴线)中的一个或多个弯曲。这个特征将参考图2a
‑
图2d描述。
42.图2a和图2b是包含两个可滑动肋120的柔性桁架机构100的示意鸟瞰图,这两个可滑动肋可以被称为第一可滑动肋120a和第二可滑动肋120b。可滑动肋120a和第二可滑动肋120b可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112中的每一个并固定地耦接至第三柔性细长构件113。图2a示出柔性桁架机构100,其中第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113中的每一个都是笔直的。因为第三柔性细长构件113固定地耦接至第一可滑动肋120a和第二可滑动肋120b中的每一个,所以由这些部件形成的连接点(在第三柔性细长构件113和第一可滑动肋120a之间的第一连接点以及在第三柔性细长构件113和第二可滑动肋120b之间的第二连接点)之间的距离保持不变。对应于固定连接的这些连接点在图2a和图2b中用圆圈标识。然而,由第一柔性细长构件111或第二柔性细长构件112形成的连接点之间的距离是可调整的。图2a将由第一柔性细长构件111(与第一可滑动肋120a和第二可滑动肋120b)形成的连接点之间的距离标识为l1。图2a还将由第二柔性细长构件112(与第一可滑动肋120a和第二可滑动肋120b)形成的连接点之间的距离标识为l1。对应于可滑动连接的这些连接点在图2a和图2b中用方块标识。在图2a的这种示例中,由于第一柔性细长构件111和第二柔性细长构件112是笔直的并且由于第一可滑动肋120a和第二可滑动肋120b彼此平行,因此这些距离是相同的。
43.图2b示出柔性桁架机构100,其中第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113中的每一个例如绕垂直于柔性桁架机构100的主轴线101的轴线102a弯曲。由第三柔性细长构件113与每个肋形成的连接点之间的距离保持相同。然而,由第一柔性细长构件111与每个肋形成的连接点之间的距离已经减小到l2,使得l2<l1。另一方面,由第二柔性细长构件112与每个肋形成的连接点之间的距离已经增加到l3,使得l3>l1。第一
柔性细长构件111和第二柔性细长构件112不再是笔直的。此外,第一可滑动肋120a和第二可滑动肋120b不再彼此平行。这样一来,柔性桁架机构100被重新配置为例如对应于特别的柔性复合零件的新形状。本领域普通技术人员将理解,相邻肋的这种弯曲和非平行配置可以用固定地附接至所有柔性细长构件的一个肋来实现。这样的肋可以被称为固定肋。换句话说,柔性桁架机构100能够用一个固定肋和至少一个可滑动肋弯曲。然而,多个固定肋可以与柔性桁架机构100的弯曲抵触。现在将参考图2c和图2d描述固定肋的附加特征。
44.图2c和图2d是包含第一可滑动肋120a、第二可滑动肋120b和固定肋180的柔性桁架机构100的另一示例的示意图。类似于图2a和图2b所示和以上所描述的示例,第一可滑动肋120a和第二可滑动肋120b可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112中的每一个并固定地耦接至第三柔性细长构件113。然而,固定肋180固定地耦接至第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113中的每一个。在图2c中,所有的第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113都是笔直的。第一可滑动肋120a、第二可滑动肋120b和固定肋180都彼此平行。
45.图2d示出柔性桁架机构100,其中第一柔性细长构件111、第二柔性细长构件112和第三柔性细长构件113中的每一个都例如围绕垂直于柔性桁架机构100的主轴线101的轴线102a弯曲。由第三柔性细长构件113与每个肋形成的连接点之间的距离保持相同。然而,由第一柔性细长构件111与固定肋180和每个可滑动肋形成的连接点之间的距离已经减小。在另一方面,由第二柔性细长构件112与固定肋180和每个可滑动肋形成的连接点之间的距离已经增加。第一柔性细长构件111和第二柔性细长构件112不再是笔直的。第一可滑动肋120a、固定肋180和第二可滑动肋120b不再彼此平行。固定肋180的其他示例位置也是可能的。例如,在一个示例中,固定肋180被设置在柔性桁架系统100的一个端部处。
46.参考图1d和图3a
‑
图3b,在一些示例中,可滑动肋120中的每一个包含一个或多个滑动机构130。滑动机构130的数量取决于该特定的可滑动肋120可滑动地耦接至多少个柔性细长构件110。简要参考图1d的示例,可滑动肋120可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112两者。在这种示例中,可滑动肋120包含两个滑动机构130,其中一个可滑动地将该肋耦接至第一柔性细长构件111并且另一个可滑动地将该肋耦接至第二柔性细长构件112。换句话说,针对相对于可滑动肋120可滑动的每个柔性细长构件110,每个可滑动肋120包含一个滑动机构130。滑动机构130在该肋和对应的柔性细长构件之间提供可滑动的耦接。
47.参考图3a
‑
图3b,在一些示例中,滑动机构130包含一个或多个滚轴140,这些滚轴可滚动地接合柔性细长构件110中的至少一个(例如,图3a
‑
图3b中示出的第一柔性细长构件111)。例如,滑动机构130包含两个滚轴140,使得第一柔性细长构件111被定位在这两个滚轴140之间。这两个滚轴140由附接至可滑动肋120的支撑臂121的滚轴支撑件142支撑。图3b示出移除了滚轴支撑件142的可滑动肋120,以示出滚轴140和第一柔性细长构件111的相对位置。
48.虽然肋相对于柔性细长构件的滑动允许柔性桁架机构100弯曲,例如,遵循新复合零件的形状,但相对于柔性细长构件固定肋允许在例如转移新复合零件时保持柔性桁架机构100的新形状。现在将参考图4a
‑
图4c描述出于这种目的所使用的定位锁150。
49.参考图1b、图1d和图4a,在一些示例中,可滑动肋120中的每一个包含一个或多个
定位锁150。类似于滑动机构130,定位锁150的数量取决于该特定的可滑动肋120可滑动地耦接至多少个柔性细长构件110。简要地参考图1d的示例,可滑动肋120可滑动地耦接至第一柔性细长构件111和第二柔性细长构件112两者。在该示例中,可滑动肋120包含两个定位锁150,一个用于维持可滑动肋120相对于第一柔性细长构件111的位置,并且另一个用于维持可滑动肋120相对于第二柔性细长构件112的位置。换句话说,针对相对于可滑动肋120可滑动的每个柔性细长构件110,每个可滑动肋120包含一个定位锁150。
50.定位锁150被配置为将对应的可滑动肋120(定位锁150是其一部分)锁定在设定位置。该固定位置是相对于这种可滑动肋120可滑动地耦接到的柔性细长构件110而言的。例如,定位锁150在锁定位置和解锁位置之间是可切换的。当定位锁150处于锁定位置时,定位锁150防止可滑动肋120相对于对应的柔性细长构件110滑动。当定位锁150处于解锁位置时,定位锁150允许可滑动肋120相对于对应的柔性细长构件110滑动。
51.参考图4a,在一些示例中,定位锁150包含线性致动器152、切口螺母154和带螺纹定位轴156。带螺纹定位轴156固定地连接至柔性细长构件110中的至少一个,例如,图4a所示的第一柔性细长构件111。例如,使用限位器160将带螺纹定位轴156的末端固定地连接至第一柔性细长构件111来提供这种固定连接。线性致动器152耦接至切口螺母154并被配置为相对于带螺纹定位轴156在轴接合位置和轴脱离位置之间移动切口螺母154。在一些示例中,线性致动器152是气动汽缸。
52.图4b示出轴接合位置,其对应于定位锁150的锁定位置。在该位置处,切口螺母154接合带螺纹定位轴156(例如,切口螺母154的螺纹与带螺纹定位轴156的螺纹互锁,从而防止切口螺母154沿着带螺纹定位轴156滑动)。由于带螺纹定位轴156和柔性细长构件110之间的固定连接,以及切口螺母154和可滑动肋120的其他部件之间的连接(图4b所示),可滑动肋120不能够相对于第一柔性细长构件111滑动。
53.图4c示出轴脱离位置,其对应于定位锁150的解锁位置。在该位置处,切口螺母154移动远离带螺纹定位轴156,从而允许口螺母154沿着带螺纹定位轴156(例如,沿着平行于带螺纹定位轴156的方向)滑动。结果,可滑动肋120能够相对于第一柔性细长构件111滑动。
54.用于转移柔性复合零件的方法的示例
55.图5是根据一些示例的对应于使用柔性桁架系统199转移柔性复合零件600的方法500的过程流程图。上文描述了包含柔性桁架机构100和拾取放置机构190的柔性桁架系统199的各种特征。
56.在一些示例中,方法500包含使柔性复合零件600与每个拾取放置机构190接触(框510)。拾取放置机构190被支撑在柔性桁架机构100上并沿着柔性桁架机构100的主轴线101分布。如上文参考图1a
‑
图4所描述,柔性桁架机构100包含柔性细长构件110和可滑动肋120。可滑动肋120耦接至柔性细长构件110中的每一个并相对彼此支撑柔性细长构件110。此外,在一些示例中,复合拾取放置机构190被附接至可滑动肋120或以其他方式由可滑动肋120支撑。
57.在一些示例中,使柔性复合零件600与拾取放置机构190中的每一个接触(框510)包含使可滑动肋120中的至少一个相对于柔性细长构件110中的至少一个滑动(框512),如上文参考图2a
‑
图2d所描述。该特征允许柔性细长构件110弯曲,这进而允许拾取放置机构190中的每一个接触柔性复合零件600。
58.例如,图6a示出带有笔直的柔性细长构件110的柔性桁架系统199。结果,复合拾取放置机构190沿着直线(图6a中示出为虚线)对齐。然而,在该示例中,柔性复合零件600不是笔直的并且很多复合拾取放置机构190不能够接触柔性复合零件600。在没有被充足数量的复合拾取放置机构190接触的情况下,柔性复合零件600例如由于是柔性的而不被充足地支撑。复合拾取放置机构190的数量、间距和其他特性基于柔性复合零件600的类型(例如,大小、重量、固化状态等)来确定。
59.图6b示出使可滑动肋120中的至少一个相对于柔性细长构件110中的至少一个滑动并(相对于图6b)弯曲柔性细长构件110之后的柔性细长构件110。在该图示中,复合拾取放置机构190全部与柔性复合零件600接触,以向柔性复合零件600提供充足的支撑。
60.在一些示例中,方法500继续进行例如使用上文参考图4a
‑
图4c所描述的定位锁150锁定可滑动肋120中的至少一个相对于柔性细长构件110中的至少一个的位置(框520)。在更具体的示例中,所有的可滑动肋120相对于每个柔性细长构件110都被锁定。应当指出,在一些示例中,一个或多个柔性细长构件110被固定地附接至可滑动肋120。这种锁定/固定附接保持了柔性细长构件110的形状。结果,例如,如图6b所示,拾取放置机构190中的每一个和柔性复合零件600之间的接触得以维持。
61.在一些示例中,方法500继续进行在维持每个拾取放置机构190和柔性复合零件600之间的接触的同时使用柔性桁架系统199转移柔性复合零件600(框530)。例如,在各种过程之间,例如在形成柔性复合零件600和固化柔性复合零件之间,使用柔性桁架系统199转移复合零件600。例如,使用柔性桁架系统199人工手动地或使用提升机构195进行柔性复合零件600的组装。应当指出,在这种操作期间,柔性复合零件600由柔性桁架系统199支撑。
62.在一些示例中,方法500继续进行将柔性复合零件600与每个拾取放置机构190脱离(框540)。例如,将施加于用作拾取放置机构190的吸盘192的真空释放,从而允许吸盘192与柔性复合零件600分离。
63.在一些示例中,方法500继续进行解锁可滑动肋120相对于柔性细长构件110中的至少一个的位置(框550)。应当指出,当拾取放置机构190接合并支撑柔性复合零件600时,将可滑动肋120相对于柔性细长构件110中的至少一个锁定以保持柔性桁架系统199的形状。然而,为了重新配置柔性桁架系统199(例如,以便支撑具有不同形状的附件的柔性复合零件610),可滑动肋120的位置被解锁。
64.在一些示例中并参考图5中的判断框560,方法500继续进行使用相同的柔性桁架系统199转移另一个柔性复合零件(例如,图6c所示)。在这种情况下,重复上文参考框510
‑
550所描述的各种操作。例如,方法500继续进行将附加的柔性复合零件610与支撑在柔性桁架机构100上的每个拾取放置机构190接触(框510)。(附加的柔性复合零件610的)这种接触操作包含相对于柔性细长构件110中的至少一个滑动可滑动肋120中的至少一个(框512)。这种滑动允许柔性细长构件110弯曲并允许每个拾取放置机构190与附加的柔性复合零件610形成接触。如图6b和图6c所示,附加的柔性复合零件610和柔性复合零件600具有不同的形状。这样一来,柔性桁架系统199在这种操作期间被重新配置为匹配附加的柔性复合零件610的形状。
65.在一些示例中,方法500进一步包含将可滑动肋120相对于柔性细长构件110中的至少一个锁定在附加的设定位置中(框520)。这种锁定保持柔性细长构件110的形状(现在
匹配附加的柔性复合零件610)并维持每个拾取放置机构190和附加的柔性复合零件610之间的接触。这些附加的设定位置不同于前面用于柔性复合零件600的设定位置。
66.飞行器示例
67.在一些示例中,上文所描述的方法和系统在飞行器上使用,并且更普遍地被航空航天工业使用。具体地,这些方法和系统可以在飞行器的加工期间使用,也可以在飞行器服役和维护期间使用。
68.相应地,上文所描述的装置和方法适用于如图7所示的飞行器制造和维护方法900并适用于如图8所示的飞行器902。在预生产期间,方法900包括飞行器902的规格和设计904以及材料采购906。在生产期间,进行飞行器902的部件和子组件制造908以及系统集成910。此后,为了放置于服务914中飞行器902经历认证和交付912,以便将其投入使用914。当被客户使用时,飞行器902被安排进行日常维修和维护916,其还包括改装、重新配置、翻新等。
69.在一些示例中,方法900的每个过程由系统集成商、第三方和/或运营商(例如,客户)执行或完成。为了本说明书的目的,系统集成商包括但不限于任何数量的飞行器制造商和主要系统分包商;第三方包括但不限于任何数量的销售商、分包商和供应商;并且运营商可以是航空公司、租赁公司、军事实体、服务组织等。
70.如图8所示,由方法900生产的飞行器902包括机身918以及多个系统920和内部922。系统920的示例包括推进系统924、电气系统926、液压系统928和环境系统930中的一个或多个。可以包括任何数量的其他系统。尽管示出了航空航天示例,但是本文描述的示例的原理适用于其他工业,诸如汽车工业。
71.可以在方法900的任何一个或多个阶段中采用本文所提出的装置和方法。例如,与制造908相对应的部件或子组件以类似于在飞行器902投入使用时生产的部件或子组件的方式加工或制造。此外,在制造908和系统集成910期间利用一个或多个装置示例、方法示例或其组合,例如用以充分加速飞行器902的组装或降低其成本。类似地,在飞行器902投入使用时利用一个或多个装置示例、方法示例或其组合,例如且不限于用于维修和维护916。
72.进一步示例
73.进一步地,说明书包括根据下面条款所述的示例:
74.条款1.一种柔性桁架机构,其包含:
75.柔性细长构件,其沿着柔性桁架机构的主轴线延伸;
76.可滑动肋,其耦接至柔性细长构件中的每一个并且相对于彼此支撑柔性细长构件,其中:
77.可滑动肋沿着柔性桁架机构的主轴线彼此隔开;
78.可滑动肋被配置为接收和支撑一个或多个复合拾取放置机构;以及
79.可滑动肋中的每一个可滑动地耦接至柔性细长构件中的至少一个,从而允许可滑动肋中的每一个相对于柔性细长构件中的至少一个沿着主轴线滑动并允许柔性细长构件绕垂直于主轴线的至少一个轴线弯曲。
80.条款2.根据条款1所述的柔性桁架机构,其中:
81.可滑动肋中的每一个包含用于柔性细长构件中的每一个的相对于可滑动肋可滑动的定位锁;以及
82.定位锁被配置为将可滑动肋中的对应一个相对于柔性细长构件中的至少一个锁
定在设定位置。
83.条款3.根据条款2所述的柔性桁架机构,其中:
84.定位锁是在锁定位置和解锁位置之间可切换的;
85.当定位锁处于锁定位置时,定位锁防止可滑动肋中的对应一个相对于柔性细长构件中的至少一个滑动;以及
86.当定位锁处于解锁位置时,定位锁允许可滑动肋中的对应一个相对于柔性细长构件中的至少一个滑动。
87.条款4.根据条款3所示的柔性桁架机构,其中:
88.定位锁包含线性致动器、切口螺母以及固定地连接至柔性细长构件中的至少一个的带螺纹定位轴;
89.线性致动器耦接至切口螺母并被配置为使切口螺母相对于带螺纹定位轴在轴接合位置和轴脱离位置之间移动;
90.轴接合位置对应于定位锁的锁定位置;以及
91.轴脱离位置对应于定位锁的解锁位置。
92.条款5.根据条款4所述的柔性桁架机构,其中线性致动器是汽缸。
93.条款6.根据条款5所述的柔性桁架机构,其中可滑动肋中的每一个固定地耦接至柔性细长构件中的至少另一个。
94.条款7.根据条款1
‑
6中的任一项所述的柔性桁架机构,其中可滑动肋中的每一个可滑动地耦接至柔性细长构件中的至少两个,从而允许可滑动肋中的每一个相对于柔性细长构件中的至少两个沿着主轴线滑动。
95.条款8.根据条款1
‑
7中的任一项所述的柔性桁架机构,其中可滑动肋中的每一个可滑动地耦接至全部柔性细长构件,从而允许可滑动肋中的每一个相对于全部柔性细长构件沿着主轴线滑动。
96.条款9.根据条款1
‑
8中的任一项所述的柔性桁架机构,其中:
97.可滑动肋中的每一个包含用于柔性细长构件中的每一个的相对于可滑动肋可滑动的滑动机构;以及
98.滑动机构包含与柔性细长构件中的至少一个可滚动地接合的一个或多个滚轴。
99.条款10.根据条款1
‑
9中的任一项所述的柔性桁架机构,其中可滑动肋中的每一个包含多个支撑臂,其中多个支撑臂中的每一个至少部分地限定对应的一对柔性细长构件之间的距离。
100.条款11.根据条款10所述的柔性桁架机构,其中多个支撑臂中的每一个的长度是相同的。
101.条款12.根据条款10所述的柔性桁架机构,其中多个支撑臂中的每一个是笔直的。
102.条款13.根据条款1
‑
12中的任一项所述的柔性桁架机构,其中柔性细长构件中的每一个由碳纤维形成。
103.条款14.根据条款1
‑
13中的任一项所述的柔性桁架机构,其中柔性细长构件中的每一个突出穿过可滑动肋中的每一个。
104.条款15.根据条款1
‑
14中的任一项所述的柔性桁架机构,进一步包含固定肋,该固定肋固定地耦接至柔性细长构件中的每一个。
105.条款16.一种柔性桁架系统,其包含:
106.柔性桁架机构,其包含沿着柔性桁架机构的主轴线延伸的柔性细长构件和耦接至每个柔性细长构件的可滑动肋;以及
107.拾取放置机构,其中:
108.拾取放置机构中的每一个由可滑动肋中的对应一个支撑;以及
109.可滑动肋中的每一个可滑动地耦接至柔性细长构件中的至少一个,从而允许可滑动肋中的每一个相对于柔性细长构件中的至少一个沿着主轴线滑动并允许柔性细长构件绕垂直于主轴线的至少一个轴线弯曲。
110.条款17.根据条款16所述的柔性桁架系统,进一步包含真空源,其中拾取放置机构中的每一个包含吸盘,该吸盘被配置为可控地连接至真空源。
111.条款18.根据条款16
‑
17中的任一项所述的柔性桁架系统,其中:
112.可滑动肋中的每一个包含用于柔性细长构件中的每一个的相对于可滑动肋可滑动的定位锁;以及
113.定位锁被配置为将可滑动肋中的对应一个相对于柔性细长构件中的至少一个锁定在设定位置。
114.条款19.根据条款18所述的柔性桁架系统,其中:
115.定位锁是在锁定位置和解锁位置之间可切换的;
116.当定位锁处于锁定位置时,定位锁防止可滑动肋中的对应一个相对于柔性细长构件中的至少一个滑动;以及
117.当定位锁处于解锁位置时,定位锁允许可滑动肋中的对应一个相对于柔性细长构件中的至少一个滑动。
118.条款20.根据条款19所述的柔性桁架系统,其中:
119.定位锁包含线性致动器、切口螺母以及固定地连接至柔性细长构件中的至少一个的带螺纹定位轴;
120.线性致动器耦接至切口螺母并被配置为使切口螺母相对于带螺纹定位轴在轴接合位置和轴脱离位置之间移动;
121.轴接合位置对应于定位锁的锁定位置;以及
122.轴脱离位置对应于定位锁的解锁位置。
123.条款21.根据条款20所述的柔性桁架系统,进一步包含压力源,其中每个可滑动肋的定位锁的线性制动器是可控地耦接至压力源的汽缸。
124.条款22.根据条款21所述的柔性桁架系统,进一步包含系统控制器,该系统控制器通信地耦接至压力源并被配置为选择性地将每个可滑动肋的定位锁的线性致动器与压力源连接和断开。
125.条款23.一种使用包含柔性桁架机构和拾取放置机构的柔性桁架系统转移柔性复合零件的方法,该方法包含:
126.使柔性复合零件与支撑在柔性桁架机构上的拾取放置机构中的每一个接触,其中:
127.柔性桁架机构包含柔性细长构件和可滑动肋,可滑动肋耦接至柔性细长构件中的每一个并相对于彼此支撑柔性细长构件;以及
128.接触柔性复合零件包含相对于柔性细长构件中的至少一个滑动可滑动肋中的至少一个,从而允许柔性细长构件弯曲并允许拾取放置机构中的每一个与柔性复合零件形成接触;以及
129.将可滑动肋相对于柔性细长构件中的至少一个锁定在设定位置,从而保持柔性细长构件的形状并维持拾取放置机构中的每一个与柔性复合零件之间的接触;以及
130.在维持拾取放置机构中的每一个与柔性复合零件之间的接触的同时,使用柔性桁架系统转移柔性复合零件。
131.条款24.根据条款23所述的方法,进一步包含:
132.使柔性复合零件与拾取放置机构中的每一个脱离;以及
133.将可滑动肋相对于柔性细长构件中的至少一个的位置解锁。
134.条款25.根据条款23
‑
24中的任一项所述的方法,进一步包含:
135.使附加的柔性复合零件与支撑在柔性桁架机构上的每个拾取放置机构接触,其中:
136.接触附加的柔性复合零件包含使可滑动肋中的至少一个相对于柔性细长构件中的至少一个滑动,从而允许柔性细长构件弯曲并允许拾取放置机构中的每一个与附加的柔性复合零件形成接触;以及
137.附加的柔性复合零件与柔性复合零件具有不同的形状。
138.条款26.根据条款25所述的方法,进一步包含将可滑动肋相对于柔性细长构件中的至少一个锁定在附加的设定位置,从而保持柔性细长构件的形状并维持拾取放置机构中的每一个与附加的柔性复合零件之间的接触,其中附加的设定位置不同于用于柔性复合零件的设定位置。
139.条款27.根据条款23
‑
26中的任一项所述的方法,其中使用定位锁完成可滑动肋中的每一个相对于柔性细长构件中的至少一个的锁定。
140.条款28.根据条款27所述的方法,其中:
141.定位锁包含线性致动器、切口螺母以及固定地连接至柔性细长构件中的至少一个的带螺纹定位轴;
142.线性致动器耦接至切口螺母并被配置为使切口螺母相对于带螺纹定位轴在轴接合位置和轴脱离位置之间移动;以及
143.相对于柔性细长构件中的至少一个锁定可滑动肋中的每一个包含将切口螺母从轴脱离位置移动到轴接合位置。
144.结论
145.尽管出于清楚理解的目的,已经以一些细节描述了上述概念,但显而易见的是在所附条款的范围内可以实践某些改变和修改。应当指出,存在实施过程、系统和装置的替换方式。相应地,当前的示例被认为是说明性的而非限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1