一种带充电功能的无人机停机库的制作方法
1.本发明涉及无人机技术领域,具体为一种带充电功能的无人机停机库。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,可在无线电遥控下像普通飞机一样起飞或用助推火箭发射升空,也可由母机带到空中投放飞行。回收时,可用与普通飞机着陆过程一样的方式自动着陆,也可通过遥控用降落伞或拦网回收,可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等,同时,随着无人机的技术不断进步,无人机也进入到快递行业、服装零售行业、度假旅游业、体育和媒体行业等。但是无人机的续航时间成为了阻碍无人机发展的最大瓶颈,虽然锂电池是目前市场上综合性能最好的电池,但依旧无法完全满足无人机续航需求,因此在无人机使用过程中必须要考虑到无人机充电问题。现有的无人机充电常常是采用无人机停机库进行充电,通过将无人机停靠在无人机停机库内的停机坪上,然后将电源线插入无人机上的电池充电接口内进行充电。但是该种无人机停机库的无人机充电时间长,无人机需要长时间停靠充电,才能再次起飞,无法实现无人机的持续续航作业。有的采用人工更换电池,但是人工更换效率低,且需人员值守,无法长时间在野外工作,人力投入巨大。
技术实现要素:
3.本发明的目的在于提供一种带充电功能的无人机停机库,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种带充电功能的无人机停机库,包括机架,所述机架呈长方体结构设计,其上方设有库门,所述库门的下方设有水平驱动组件,所述机架两个侧边均设有一个固定支架,两个所述固定支架对称设置于机架的两侧,两个所述固定支架之间滑动连接有矩形的停机坪,所述停机坪上连接有归中结构,所述停机坪的侧边设有固定于机架内侧的电池仓,所述电池仓的侧边设有换电池结构,所述换电池结构的上方设有固定于机架上的压紧结构;所述换电池结构包含协作机器人,所述协作机器人上安装有连接板,所述连接板的一侧面固定有步进电机,所述步进电机的输出轴端设有扳手,所述连接板的远离步进电机的侧面设有对称设置的两个夹爪气缸,两个所述夹爪气缸分别连接有一对夹爪,所述连接板的设有夹爪气缸的侧面设有压杆;所述电池仓包含固定台,所述固定台上设有对称设置的两个摆放架,所述摆放架上设有多个隔板,所述隔板上设有导条;所述压紧结构包含固定板,所述固定板上方设有压紧电机,所述压紧电机的输出轴端连接有水平设有的压紧臂,所压紧臂的远离压紧电机端设有多个矩形阵列排列的压紧
杆,多个所述压紧杆的远离压紧臂端连接有压板,所述压紧杆上套设有弹簧,所述压板的远离压紧杆的侧面设有多个压块。
5.进一步优选,两个所述固定支架上均设有两个竖直设置的第一直线导轨,所述第一直线导轨的滑块与停机坪相连接。
6.进一步优选,所述库门包含对称设置的第一库门和第二库门,所述第一库门和第二库门滑动连接有第二直线导轨,所述第二直线导轨固定于机架的横梁上。
7.进一步优选,所述水平驱动组件包含水平皮带和支撑轮,两根所述水平皮带与第一库门、第二库门均相连接,且对称设置于机架的两侧,两根所述水平皮带中至少一根连接有水平电机,所述水平电机固定于机架上,所述水平皮带的环形两侧边分别设有一个第一连接块,两个所述第一连接块分别与第一库门、第二库门相连接,所述支撑轮设置于两根所述水平皮带之间且固定于机架上,所述支撑轮的轮面弹性抵靠于第二库门的下侧面,所述支撑轮至少有一个。
8.进一步优选,两个所述固定支架中的其中一个上设有升降驱动组件,所述升降驱动组件包含相互连接的升降电机和升降皮带,所述升降电机固定于固定支架的下端,所述升降皮带竖直固定于固定支架上。
9.进一步优选,所述归中结构包含四根归中臂,四根所述归中臂两两平行且垂直相交,其中两根平行的归中臂上设有卡爪,两根平行所述归中臂的同一端均连接有一个第二连接块,所述第二连接块连接有归中驱动皮带,两个所述第二连接块分设于归中驱动皮带的环形两侧边,所述归中驱动皮带连接有固定于停机坪下方的归中驱动电机。
10.进一步优选,所述停机坪的四侧边均设有第三直线导轨,四个所述第三直线导轨上均设有两个滑块,其分别与四根归中臂的两端相连接。
11.进一步优选,所述卡爪包含爪头和安装板,所述安装板固定于归中臂上,所述安装板上设有一个圆形的连接孔和弧形的调节孔,所述爪头通过连接孔和调节孔与安装板转动连接。
12.进一步优选,所述隔板的上方设有固定于摆放架上的挡板,所述挡板上固定有充电插座,所述摆放架上设有对应挡板的接近开关。
13.进一步优选,所述压紧杆与压紧臂活动连接,所述压块上固定有柔性垫板,所述压板上固定有垂直于其上的限位板,所述压紧臂的靠近压板的侧面设有对应限位板的限位传感器。
14.有益效果:本发明的带充电功能的无人机停机库,通过水平驱动组件实现对库门的自动开启和关闭,通过归中结构实现无人机的归中定位,保证无人机位于停机坪的中间,通过升降驱动组件驱动停机坪上升,通过压紧结构压住无人机的上方将无人机固定住,通过换电池结构实现无人机的换电池动作;本技术的无人机停机库结构紧凑,设计巧妙,实现无人机的自动开关库门、无人机的归中定位、无人机的固定和无人机的自动换电池,同时换下的电池能够自动充电,且能够对多个无人机进行换电池,实现无人机停机库的全自动操作,节省人工,节约成本,同时实现无人机的自动续航,实现无人机的长时间作业。
附图说明
15.图1为本发明实施例所公开的带充电功能的无人机停机库的内部结构示意图;
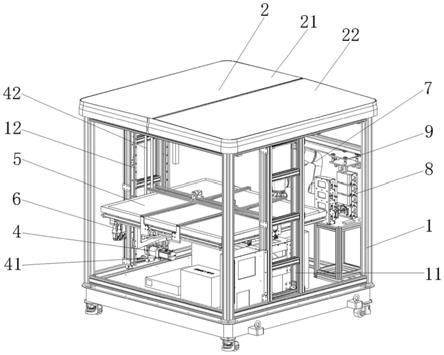
图2为本发明实施例所公开的带充电功能的无人机停机库的外形结构示意图;图3为本发明实施例所公开的水平驱动组件的结构示意图;图4为本发明实施例所公开的升降驱动组件和归中结构的结构示意图;图5为本发明实施例所公开的换电池结构的结构示意图;图6为本发明实施例所公开的电池仓的结构示意图;图7为本发明实施例所公开的压紧结构的结构示意图;图8为本发明实施例所公开的卡爪的结构示意图。
16.附图标记:1
‑
机架,11
‑
固定支架,12
‑
第一直线导轨,13
‑
第二直线导轨,2
‑
库门,21
‑
第一库门,22
‑
第二库门,3
‑
水平驱动组件,31
‑
水平电机,32
‑
水平皮带,33
‑
第一连接块,34
‑
支撑轮,4
‑
升降驱动组件,41
‑
升降电机,42
‑
升降皮带,5
‑
停机坪,51
‑
第三直线导轨,6
‑
归中结构,61
‑
归中臂,62
‑
卡爪,621
‑
爪头,622
‑
安装板,6221
‑
连接孔,6222
‑
调节孔,63
‑
第二连接块,64
‑
归中驱动皮带,65
‑
归中驱动电机,7
‑
换电池结构,71
‑
协作机器人,72
‑
连接板,73
‑
步进电机,74
‑
扳手,75
‑
夹爪气缸,76
‑
夹爪,77
‑
压杆,8
‑
电池仓,固定台,82
‑
摆放架,83
‑
隔板,831
‑
导条,84
‑
挡板,85
‑
充电插座,86
‑
接近开关,9
‑
压紧结构,91
‑
固定板,92
‑
压紧电机,93
‑
压紧臂,94
‑
压紧杆,95
‑
弹簧,96
‑
压板,97
‑
压块,98
‑
限位板,99
‑
限位传感器。
具体实施方式
17.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
18.如图1
‑
8所示,一种带充电功能的无人机停机库,包括机架1,机架1呈长方体结构设计,其上方设有库门2,库门2的下方设有水平驱动组件3,机架1两个侧边均设有一个固定支架11,两个固定支架11对称设置于机架1的两侧,两个固定支架11之间滑动连接有矩形的停机坪5,停机坪5上连接有归中结构6,停机坪5的侧边设有固定于机架1内侧的电池仓8,电池仓8的侧边设有换电池结构7,换电池结构7的上方设有固定于机架1上的压紧结构9;换电池结构7包含协作机器人71,协作机器人71上安装有连接板72,连接板72的一侧面固定有步进电机73,步进电机73的输出轴端设有扳手74,连接板72的远离步进电机73的侧面设有对称设置的两个夹爪气缸75,两个夹爪气缸75分别连接有一对夹爪76,连接板72的设有夹爪气缸75的侧面设有压杆77;电池仓8包含固定台81,固定台81上设有对称设置的两个摆放架82,摆放架82上设有多个隔板83,隔板83上设有导条831;压紧结构9包含固定板91,固定板91上方设有压紧电机92,压紧电机92的输出轴端连接有水平设有的压紧臂93,所压紧臂93的远离压紧电机92端设有多个矩形阵列排列的压紧杆94,多个压紧杆94的远离压紧臂93端连接有压板96,压紧杆94上套设有弹簧95,压板96的远离压紧杆94的侧面设有多个压块97。
19.本技术中,通过水平驱动组件3实现对库门2的自动开启和关闭,当无人机飞过来需要停靠及换电池时,通过水平驱动组件3驱动库门2打开,然后停靠在停机坪5上,通过归中结构6实现无人机的归中定位,保证无人机位于停机坪5的中间,通过升降驱动组件4驱动停机坪5上升,通过压紧结构9的压紧电机92驱动压紧臂93旋转至无人机的上方,通过压块97压住无人机的上方将无人机固定住,通过换电池结构7的协作机器人71驱动压杆77按压
一下无人机上的电源开关,通过步进电机73驱动扳手74旋转无人机上的电池锁紧卡盘,使无人机上电池处于解锁状态,然后通过一个夹爪气缸75驱动夹爪76夹住无人机上的电池,将其拆卸下来并放入电池仓8的摆放架82上,另一个夹爪气缸75驱动夹爪76将电池仓8的摆放架82上的一个充满电的电池取下,并装入无人机上的电池位,再通过扳手74将无人机上的电池锁紧卡盘锁紧,打开无人机的电源开关,完成无人机的换电池动作。本技术的无人机停机库结构紧凑,设计巧妙,实现无人机的自动开关库门、无人机的归中定位、无人机的固定和无人机的自动换电池,同时换下的电池能够自动充电,且能够对多个无人机进行换电池,实现无人机停机库的全自动操作,节省人工,节约成本,同时实现无人机的自动续航,实现无人机的长时间作业。
20.优选的,两个固定支架11上均设有两个竖直设置的第一直线导轨12,第一直线导轨12的滑块与停机坪5相连接,实现停机坪5的平稳升降。
21.优选的,库门2包含对称设置的第一库门21和第二库门22,第一库门21和第二库门22滑动连接有第二直线导轨13,第二直线导轨13固定于机架1的横梁上,通过第二直线导轨13实现第一库门21和第二库门22的移动,实现库门2的打开或关闭。
22.优选的,水平驱动组件3包含水平皮带32和支撑轮34,两根水平皮带32与第一库门21、第二库门22均相连接,且对称设置于机架1的两侧,两根水平皮带32中至少一根连接有水平电机31,水平电机31固定于机架1上,水平皮带32的环形两侧边分别设有一个第一连接块33,两个第一连接块33分别与第一库门21、第二库门22相连接,支撑轮34设置于两根水平皮带32之间且固定于机架1上,支撑轮34的轮面弹性抵靠于第二库门22的下侧面,支撑轮34至少有一个。
23.本技术中,通过水平电机31驱动水平皮带32转动,带动力环形两侧边的两个第一连接块33反向运动,进而实现带动与其连接的第一库门21和第二库门22反向运动,当第一库门21和第二库门22相对运动时,实现库门2的关闭,当第一库门21和第二库门22相背运动时,实现库门2的打开。
24.优选的,两个固定支架11中的其中一个上设有升降驱动组件4,升降驱动组件4包含相互连接的升降电机41和升降皮带42,升降电机41固定于固定支架11的下端,升降皮带42竖直固定于固定支架11上。通过升降电机41带动升降皮带42转动,实现驱动停机坪5的升降。
25.优选的,归中结构6包含四根归中臂61,四根归中臂61两两平行且垂直相交,其中两根平行的归中臂61上设有卡爪62,两根平行归中臂61的同一端均连接有一个第二连接块63,第二连接块63连接有归中驱动皮带64,两个第二连接块63分设于归中驱动皮带64的环形两侧边,归中驱动皮带64连接有固定于停机坪5下方的归中驱动电机65。
26.本技术中,通过归中驱动电机65驱动归中驱动皮带64转动,带动归中驱动皮带64的环形两侧边的两个第二连接块63反向运动,进而实现驱动与第二连接块63相连接的两根归中臂61反向运动,实现相平行的两根归中臂61反向运动,使相平行的两根归中臂61同时向停机坪5的中间移动或两侧边移动,通过相互垂直的四根归中臂61实现将停靠在停机坪5上的无人机移动至停机坪5的中间,实现无人机的归中、定位。
27.优选的,停机坪5的四侧边均设有第三直线导轨51,四个第三直线导轨51上均设有两个滑块,其分别与四根归中臂61的两端相连接。通过四个第三直线导轨51实现四根归中
臂61的反向平滑移动。
28.优选的,卡爪62包含爪头621和安装板622,安装板622固定于归中臂61上,安装板622上设有一个圆形的连接孔6221和弧形的调节孔6222,爪头621通过连接孔6221和调节孔6222与安装板622转动连接。
29.本技术中,卡爪62的爪头621可相对安装板622旋转调节,使其可根据无人机支腿 倾斜角度作旋转调整,保证爪头621能够卡住无人机的支腿,保证无人机在归中过程中不会发生倾倒,保证无人机的归中顺畅。其中,爪头621以连接孔6221为支点,以调节孔6222的弧形为旋转导向,实现爪头621的旋转。
30.优选的,隔板83的上方设有固定于摆放架82上的挡板84,挡板84上固定有充电插座85,摆放架82上设有对应挡板84的接近开关86。
31.本技术中,隔板83用于相邻两个电池的分隔,通过导条831实现电池的卡紧和定位,通过挡板84实现电池的限位,通过充电插座85实现电池的自动充电,通过接近开关86保证电池与充电插座85的连接准确、到位,保证电池能够正确充电。
32.优选的,压紧杆94与压紧臂93活动连接,压块97上固定有柔性垫板,并配合压紧杆94上的弹簧95,保证压块97不会压伤或划伤无人机;压板96上固定有垂直于其上的限位板98,压紧臂93的靠近压板96的侧面设有对应限位板98的限位传感器99,通过限位板98和限位传感器99保证无人机的固定牢固,同时不会压伤无人机。
33.本技术中,该无人机停机库的侧边还设有单独的备用电池盒14,其内装有备用电池,用于当无人机停机库出现故障时,可人工手动为无人机更换电池。
34.本技术中,该无人机停机库的工作流程为:1)当无人机飞到无人机停机库上方时,无人机停机库收到无人机停靠信息后,水平驱动组件3动作,通过水平电机31驱动水平皮带32作相背移动,带动第一库门21和第二库门22作相背移动,打开库门2;2)无人机停靠在停机坪5上,归中结构6动作,两个归中驱动电机65驱动两根归中皮带64转动,带动与其连接的四根归中臂61相向移动,将推动无人机移动,将无人机推至停机坪5的中间换电池位置;3)压紧结构9动作,压紧电机92驱动压紧臂93转动,使压板96位于无人机的正上方,然后升降驱动组件4动作,升降电机41驱动升降皮带42转动,带动停机坪5上升,使停机坪5上停靠的无人机抵靠在压板96上的压块97上,直至限位传感器99传出信号,升降驱动组件4停止动作;4)换电池结构7的协作机器人71动作,驱动压杆77按压一下无人机上的电源开关,然后步进电机73驱动扳手74动作,旋转无人机上的电池锁紧卡盘,对其固定的电池解锁,协作机器人71驱动夹爪气缸75的夹爪76抓住电池,将电池拆卸下来,最后协作机器人71将其拆卸下来的电池放入电池仓8的摆放架82上,另一个夹爪气缸75驱动夹爪76将电池仓8的摆放架82上的一个充满电的电池取下,并装入无人机上的电池位,再通过扳手74将无人机上的电池锁紧卡盘锁紧,打开无人机的电源开关,完成无人机的换电池动作。
35.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明性的保护范围之内的发明内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1