一种模块化设计多功能飞行器及其工作方法与流程
1.本发明涉及多功能无人交通技术领域,更具体的说是涉及一种模块化设计多功能飞行器及其工作方法。
背景技术:
2.随着社会的不断发展,城市的交通压力在不断增大,交通拥挤问题已成为人口密度高度集中的城市中的一大难题。国外已经开发了很多种的飞行器、飞行汽车,但大部分产品需要跑道用于起飞降落,受场地限制因素的影响较大,导致实用性比较差。由于国外现有的飞行汽车结构设计复杂,在地面通勤时受体积因素的影响,导致整体机动性能降低,并且生产成本较高,有效的承载和飞行性能都比较低,作为飞行器,无法与通航飞机相比;作为汽车,又结构设计不实用,容易损坏,满足不了汽车产品的需求。
3.因此,需要设计出一款新交通工具,可以满足作为汽车在地面进行通勤实用,又可以通过模块化的组合形成飞行器的需求,实现具有较好机动性能和组合性能,提高适用性和方便进行更换,从而方便达到根据不同工况需求进行变化。方便日常生活需求的效果。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种模块化设计多功能飞行器,该飞行器具有以车模块为基础进行多模块组合,形成既可以满足地面通勤需求,也可以满足飞行器的需求,具有好的机动性能和适用性,达到方便日常生活需求的效果。
5.为实现上述目的,本发明提供了如下技术方案:
6.一种模块化设计多功能飞行器,包括车模块、飞行模块,所述车模块包括车舱、动力源、传动装置和驱动离合器,所述车舱包括架体、底座和轮系,所述轮系通过底座与架体连接,所述动力源、传动装置和驱动离合器均设置于架体中,所述动力源通过驱动离合器控制传动装置的转动,所述传动装置用于控制轮系的转动;
7.所述飞行器还包括连接装置,所述车模块与飞行模块通过连接装置连接。
8.作为本发明的进一步改进,所述飞行模块包括推力系统,所述推力系统包括推力离合器和与推力离合器连接的推力桨叶,所述推力离合器与动力源连接。
9.作为本发明的进一步改进,所述飞行模块还包括尾翼系统,所述车模块还包括尾接装置,所述尾接装置包括导向尾管和对接件,所述导向尾管一端与架体外壁铰接,所述尾翼系统包括导流翼板和与导流翼板连接的支撑杆,所述导向尾管和支撑杆通过对接件连接固定。
10.作为本发明的进一步改进,所述飞行模块还包括翼板系统,所述翼板系统包括翼体和定翼连接件,所述架体上开设有安装槽,所述架体上还设置有用于封盖安装槽的盖板,所述连接装置设置于安装槽内,所述连接装置包括安装座和设置于安装座上的连接构件、定位构件,所述翼体上设置有限位插件,所述限位插件与定位构件插接,所述连接构件与定翼连接件连接固定,以使所述翼板系统与架体可拆卸连接。
11.作为本发明的进一步改进,所述连接构件包括驱动电机、主动齿轮、啮合齿圈、导接套和导接螺杆,所述驱动电机设置于安装座上,所述主动齿轮与驱动电机同轴固定连接,所述导接套设置于安装座上并与安装座转动连接,所述啮合齿圈同轴设置于导接套的外圈并与导接套固定连接,所述主动齿轮与啮合齿圈啮合,所述导接螺杆与导接套同轴螺纹连接,以使所述驱动电机带动导接套转动时控制所述导接螺杆的伸出和收回,所述定翼连接件上开设有供导接螺杆连接的螺孔,所述导接螺杆与螺孔连接连接时,所述翼板系统与架体连接;
12.所述定位构件上开设有供限位插件插设的定位槽。
13.作为本发明的进一步改进,所述翼体包括固定翼结构,所述固定翼结构包括平流翼板和设置于平流翼板上的襟翼,所述平流翼板与架体连接。
14.作为本发明的进一步改进,所述翼体包括倾转旋翼结构,所述倾转旋翼结构包括支撑翼板和设置于支撑翼板端部的侧旋翼,所述支撑翼板与架体连接。
15.作为本发明的进一步改进,所述翼体包括复合翼结构,所述复合翼结构包括多臂机翼、动力旋翼,所述多臂机翼包括主翼和设置于主翼上的多个翼臂,所述主翼与架体连接,多个所述翼臂上均连接动力旋翼。
16.作为本发明的进一步改进,所述翼体包括垂直升降结构,所述垂直升降结构包括翼盘、多臂定翼,所述多臂定翼与翼盘连接,所述翼盘上设置有定位块,所述定位构件上还开设有供定位块插设的定位槽,所述多臂定翼上连接有升力旋翼。
17.一种模块化设计多功能飞行器的工作方法,包括以下工作方式:
18.1):车模块单独使用;
19.2):基于步骤1),在所述车模块的尾部装设所述推力系统和所述尾翼系统,并与车模块顶部装设所述固定翼结构,所述动力源驱动推力系统,此时所述车模块和飞行模块构成可进行巡航飞行的固定翼构型;
20.3):基于步骤1),在所述车模块的尾部装设所述推力系统和所述尾翼系统,并与车模块顶部装设所述复合翼机构,此时所述车模块与飞行模块构成可改变多种飞行姿态的复合翼构型;
21.4):基于步骤1),在所述车模块的尾部装设所述尾翼系统,并与车模块顶部装设所述倾转旋翼结构,此时所述车模块与飞行模块构成可通过改变旋翼方向进行倾转的倾转旋翼构型;
22.5):基于步骤1),在所述车模块的顶部装设所述垂直升降结构,此时车模块和飞行模块构成可进行垂直起降的垂直起降构型。
23.本发明的有益效果:通过车模块中的动力源和离合器驱动传动装置运动,从而带动轮系的转动,使得车模块能够满足地面通勤的需求,飞行模块在连接装置的作用下与车模块连接,从而达到能够做为飞行器进行使用,整体方便进行组合,可以根据实际使用情况进行组合,以达到提高机动性能和适用性的效果,进而达到方便日常生活需求的效果。
附图说明
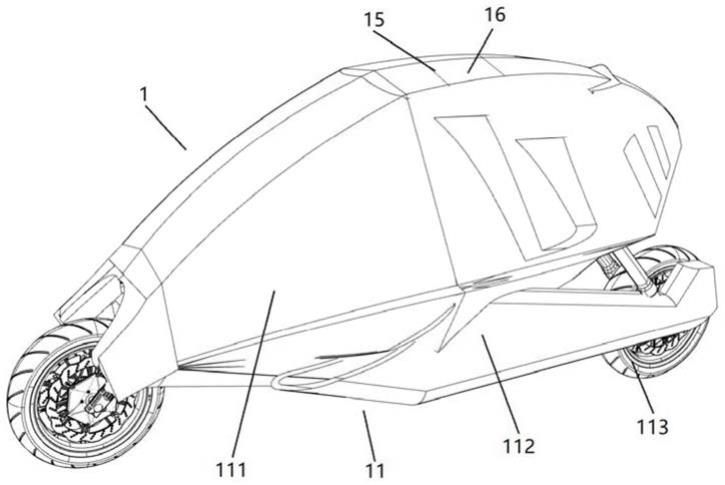
24.图1为本发明体现车模块的立体结构示意图;
25.图2为体现车模块驱动方式的流程示意图;
26.图3为体现车模块控制推力系统的流程示意图;
27.图4为体现尾接装置与尾翼系统连接的局部剖视示意图;
28.图5为体现连接装置的剖视结构示意图;
29.图6为体现车模块加装尾翼系统的结构示意图;
30.图7为体现固定翼构型的结构示意图;
31.图8为体现倾转旋翼构型的结构示意图;
32.图9为体现复合翼构型的结构示意图;
33.图10为体现垂直升降构型的结构示意图;
34.图11为体现垂直升降构型下连接装置的剖视示意图。
35.附图标记:1、车模块;11、车舱;111、架体;112、底座;113、轮系;12、动力源;121、电池;122、电机;13、传动装置;14、驱动离合器;15、安装槽;16、盖板;2、飞行模块;21、固定翼结构;211、平流翼板;212、襟翼;22、倾转旋翼结构;221、支撑翼板;222、侧旋翼;23、复合翼结构;231、多臂机翼;232、主翼;233、翼臂;234、动力旋翼;24、垂直升降结构;241、翼盘;242、多臂定翼;243、定位块;244、升力旋翼;3、连接装置;31、安装座;32、连接构件;321、驱动电机;322、主动齿轮;323、啮合齿圈;324、导接套;325、导接螺杆;33、定位构件;331、定位槽;4、推力系统;41、推力离合器;42、推力桨叶;5、尾翼系统;51、导流翼板;52、支撑杆;6、尾接装置;61、导向尾管;62、对接件;7、翼板系统;71、翼体;72、定翼连接件;73、限位插件;74、螺孔。
具体实施方式
36.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
37.实施例1:
38.参考图1至图6所示,为本发明一种模块化设计多功能飞行器及其工作方法的具体实施方式,包括车模块1、飞行模块2,车模块1包括车舱11、动力源12、传动装置13和驱动离合器14,本实施例中动力源12选用为电池121和电机122组合,车舱11包括架体111、底座112和轮系113,轮系113通过底座112与架体111连接,动力源12、传动装置13和驱动离合器14均设置于架体111中,动力源12通过驱动离合器14控制传动装置13的转动,传动装置13用于控制轮系113的转动,从而实现车模块1能够进行做为地面通勤需求,并且具备高的机动性能;
39.飞行器还包括连接装置3,车模块1与飞行模块2通过连接装置3连接,使得飞行模块2能够与车模块1进行组合使用,达到能够在飞行使用时进行组合。
40.参考图2至图6,飞行模块2包括推力系统4,推力系统4包括推力离合器41和与推力离合器41连接的推力桨叶42,推力离合器41与动力源12连接,使得在车模块1上装设推力系统4时,动力源12能够驱动推力离合器41进行传动,从而带动推力桨叶42的转动;
41.飞行模块2还包括尾翼系统5,车模块1还包括尾接装置6,尾接装置6包括导向尾管61和对接件62,导向尾管61一端与架体111外壁铰接,使得导向尾管61能够收纳进架体111中,尾翼系统5包括导流翼板51和与导流翼板51连接的支撑杆52,导向尾管61和支撑杆52通
过对接件62连接固定,导向尾管61远离与架体111铰接的一端以及支撑杆52原理导流翼板51的一端均开设有对接槽,对接件62两端分别插设进导向尾管61和支撑杆52上的对接槽内,导向尾管61和支撑杆52上螺纹连接有内六角螺栓,通过内六角螺栓将对接件62与导向尾管61和支撑杆52进行连接固定,从而使得整体尾翼系统5能够方便与车模块1进行拆装组合。
42.参考图1至图5,飞行模块2还包括翼板系统7,翼板系统7包括翼体71和定翼连接件72,架体111上开设有安装槽15,架体111上还设置有用于封盖安装槽15的盖板16,连接装置3设置于安装槽15内,连接装置3包括安装座31和设置于安装座31上的连接构件32、定位构件33,翼体71上设置有限位插件73,定位构件33上开设有供限位插件73插设的定位槽331;
43.连接构件32包括驱动电机321、主动齿轮322、啮合齿圈323、导接套324和导接螺杆325,驱动电机321设置于安装座31上,主动齿轮322与驱动电机321同轴固定连接,导接套324设置于安装座31上并与安装座31转动连接,啮合齿圈323同轴设置于导接套324的外圈并与导接套324固定连接,主动齿轮322与啮合齿圈323啮合,导接螺杆325与导接套324同轴螺纹连接,以使驱动电机321带动导接套324转动时控制所述导接螺杆325的伸出和收回,定翼连接件72上开设有供导接螺杆325连接的螺孔74,导接螺杆325与螺孔74连接连接时,将翼体71与架体111连接固定,从而实现能够方便将翼板系统7与架体111进行拆装。
44.工作原理及其效果:
45.通过飞行模块2与车模块1进行可拆装模式进行组合,达到能够在不同情况下进行自由组合,在进行地面通勤时,解除飞行模块2与车模块1的组合,使得能够进行地面通勤使用,在需要进行飞行使用时,通过连接装置3将飞行模块2与车模块1进行连接组合,并且可以根据工况的情况进行选择是否加装尾翼系统5或推力系统4,从而能够进行多模式组合,提高整体的机动性能,并且具备高适用性,达到能够方便日常生活需求的效果,不仅可以载人也可以进行载物,从而缓解社会交通压力。
46.实施例2:
47.为本发明一种模块化设计多功能飞行器的具体实施方式,与实施例1不同之处在于:参考图1、图5和图7,翼体71包括固定翼结构21,固定翼结构21包括平流翼板211和设置于平流翼板211上的襟翼212,平流翼板211通过连接装置3与架体111连接,固定翼结构21下,在车模型上加装推力系统4和尾翼系统5,固定翼结构21装设于车模块1的顶部,从而形成可进行巡航的固定翼构型。
48.实施例3:
49.为本发明一种模块化设计多功能飞行器的具体实施方式,与实施例1不同之处在于:参考图1、图5和图8,翼体71包括倾转旋翼结构22,倾转旋翼结构22包括支撑翼板221和设置于支撑翼板221端部的侧旋翼222,支撑翼板221通过连接装置3与架体111连接,在倾转旋翼结构22下,在车模块1尾部装设尾翼系统5,倾转旋翼可以沿支撑翼板221连接处进行倾转,通过改变倾转旋翼的倾转角度改变飞行姿态,从而形成能够进行倾转的倾转旋翼构型。
50.实施例4:
51.为本发明一种模块化设计多功能飞行器的具体实施方式,与实施例1不同之处在于:参考图图1、图5和图9,翼体71包括复合翼结构23,复合翼结构23包括多臂机翼231、动力旋翼234,多臂机翼231包括主翼232和设置于主翼232上的多个翼臂233,主翼232与架体111
连接,多个翼臂233上均连接动力旋翼234,在复合翼结构23下,在车模块1尾部装设推力系统4和尾翼系统5,使得在复合翼结构23的作用下能够改变不同的飞行姿态,从而形成复合翼构型。
52.实施例5:
53.为本发明一种模块化设计多功能飞行器的具体实施方式,与实施例1不同之处在于:参考图1、图5、图10和图11,翼体71包括垂直升降结构24,垂直升降结构24包括翼盘241、多臂定翼242,多臂定翼242与翼盘241连接,翼盘241上设置有定位块243,定位构件33上还开设有供定位块243插设的定位槽331,多臂定翼242上连接有升力旋翼244,在垂直升降结构24下,不需要在车模块1上加装推力系统4或尾翼系统5,多臂定翼242上连接的升力旋翼244起到提供整体飞行时的动力和用于改变飞行姿态,从而形成能够进行垂直起降的垂直起降构型。
54.实施例6:
55.为本发明一种模块化设计多功能飞行器及其工作方法的具体实施方式,具体工作方法为:
56.1):车模块1单独使用;
57.2):基于步骤1),在所述车模块1的尾部装设所述推力系统4和所述尾翼系统5,并与车模块1顶部装设所述固定翼结构21,所述动力源12驱动推力系统4,此时所述车模块1和飞行模块2构成可进行巡航飞行的固定翼构型;
58.3):基于步骤1),在所述车模块1的尾部装设所述推力系统4和所述尾翼系统5,并与车模块1顶部装设所述复合翼机构,此时所述车模块1与飞行模块2构成可改变多种飞行姿态的复合翼构型;
59.4):基于步骤1),在所述车模块1的尾部装设所述尾翼系统5,并与车模块1顶部装设所述倾转旋翼结构22,此时所述车模块1与飞行模块2构成可通过改变旋翼方向进行倾转的倾转旋翼构型;
60.5):基于步骤1),在所述车模块1的顶部装设所述垂直升降结构24,此时车模块1和飞行模块2构成可进行垂直起降的垂直起降构型。
61.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1