一种大中型固定翼无人机自动起飞控制方法及系统与流程
1.本发明属于无人机起飞控制方法技术领域,具体涉及一种大中型固定翼无人机自动起飞控制方法。本发明还涉及一种大中型固定翼无人机自动起飞控制系统。
背景技术:
2.近年来,由于我国支线、偏远地区、小运量货运能力不足和无人机技术发展的日渐成熟,我国形成了大中型固定翼无人机研究热潮。大中型固定翼无人机具有货运载荷大、续航时间长、起降能力惊人等独特的性能优势,市场前景和商业价值潜力巨大。
3.在现有技术中,大中型固定翼多用途无人机的起飞控制,需要工作人员在地面控制站对无人机起飞过程进行全程操纵,无法达到全自动起飞。
技术实现要素:
4.本发明的目的在于提供一种大中型固定翼无人机自动起飞控制方法,解决了现有无人机起飞过程需要人员全程操纵的问题。
5.本发明的另一目的在于提供一种大中型固定翼无人机自动起飞控制系统。
6.本发明所采用的第一种技术方案是:一种大中型固定翼无人机自动起飞控制方法,包括以下步骤:
7.步骤1、无人机起飞前检查,检查通过后地面站发送给无人机起飞指令;
8.步骤2、无人机进入起飞状态后发动机开始运转,当发动机功率达到总功率的50%以上时,开启刹车纠偏和方向舵纠偏,基于侧偏量进行刹车纠偏,基于真航向进行方向舵纠偏,纵向采用俯仰角保持,横向采用滚转角保持;
9.步骤3、无人机开始地面滑跑后进行离地检测,若检测出无人机还处于地面上,则通过判断无人机地速与侧偏距、或者通过判断无人机滑跑距离决定是否终止起飞;若检测出无人机已经离地且离地高度在15m以上时,切断刹车控制,进入航迹跟踪;
10.步骤4、无人机离地高度达到50m以上时收起襟翼,切换至空中控制参数,进入预定航线飞行。
11.本发明第一种技术方案的特点还在于:
12.步骤1中无人机起飞前检查的项目包括无线电高度、机场高度、初始侧偏、航向对准情况、桨距是否为小距、发动机是否处于暖车。
13.步骤1中当无线电高度和无人机当前位置的高度一致、机场高度与机场海拔高度一致、初始侧偏5m以下、航向偏差20度以下、桨距为小距且发动机处于暖车时,则检查通过。
14.步骤2中开启刹车纠偏具体为,当出现侧偏量时,根据公式(1)给出刹车量进行纠偏:
[0015][0016]
式(1)中,δb为刹车量,为刹车控制中的偏航角偏差比例系数,ψh为航向角,ψ
cmd
为跑道航向,为刹车控制中的侧偏量比例系数,dy为偏离跑道中线的侧偏距;
[0017]
步骤2中方向舵基于真航向进行纠偏具体为,当真航向出现偏差时,根据公式(2)给出方向舵偏转值进行纠偏:
[0018][0019]
式(2)中,δr为方向舵角度,为方向舵纠偏中的航向角偏差比例系数,为方向舵纠偏中的侧偏量比例系数,为偏航角速度的比例系数,r 为偏航角速度;
[0020]
步骤2中根据公式(3)给出升降舵角度数值,使俯仰角保持定值:
[0021][0022]
式(3)中,δe为升降舵角度,为升降舵控制中俯仰角偏差的比例系数,θ为俯仰角,θ
cmd
为俯仰角指令,为俯仰角速度的比例系数,q俯仰角速度;θ
int
为积分项,由公式(4)求得:
[0023][0024]
式(4)中,为积分系数,θ
cmd_int
为俯仰角指令的积分项;
[0025]
步骤2中根据公式(5)给出副翼角度数值,使滚转角保持定值:
[0026][0027]
式(5)中,δa为副翼角度,为副翼控制中的滚转角偏差比例系数,φ为滚转角,φ
cmd
为滚转角指令,为滚转角速度的比例系数,p为滚转角速度。
[0028]
步骤3中若检测出无人机还处于地面上,判断无人机地速20m/s以下且侧偏距5m以上,或者无人机滑跑距离600m以上时,则终止起飞;反之,则进入步骤2。
[0029]
本发明所采用的第二种技术方案是:一种大中型固定翼无人机自动起飞控制系统,包括起飞检查模块,起飞检查模块上依次电连接有地面站控制模块和发动机调控单元,起飞检查模块上还电连接有纠偏控制模块和判断模块,纠偏控制模块上电连接有发动机功率检测单元,判断模块上电连接有离地检测模块和状态切换模块;
[0030]
起飞检查模块,用于起飞前对无人机进行检查,检查通过后,起飞检查模块通过地面站控制模块向发动机调控单元发出起飞指令;
[0031]
纠偏控制模块,在无人机进入起飞状态后发动机开始运转,发动机功率检测单元检测到发动机功率达到总功率的50%以上时,用于开启刹车纠偏和方向舵纠偏,基于侧偏量进行刹车纠偏,基于真航向进行方向舵纠偏,纵向采用俯仰角保持,横向采用滚转角保持;
[0032]
离地检测模块,用于无人机开始地面滑跑后进行离地检测,若检测出无人机还处于地面上,则通过判断模块判断无人机地速与侧偏距、或者通过判断模块判断无人机滑跑距离决定是否终止起飞;若检测出无人机已经离地且离地高度在15m以上时,则判断模块判断出切断刹车控制,进入航迹跟踪;
[0033]
状态切换模块,无人机离地高度达到50m以上时判断模块判断出收起襟翼,用于切换至空中控制参数,进入预定航线飞行。
[0034]
本发明第二种技术方案的特点还在于:
[0035]
起飞检查模块包括均与地面站控制模块电连接的发动机状态检测单元、桨距操纵杆位置检测模块、无线电高度检测单元、机场高度检测单元、航向检测单元以及侧偏检测单元。
[0036]
纠偏控制模块包括与航向检测单元电连接的方向舵纠偏单元以及与侧偏检测单元电连接的刹车纠偏单元,还包括升降舵角度调节单元和副翼角度调节单元,升降舵角度调节单元上电连接有升降舵角度检测单元,副翼角度调节单元上电连接有副翼角度检测单元,方向舵纠偏单元、刹车纠偏单元、升降舵角度调节单元和副翼角度调节单元均与发动机功率检测单元电连接。
[0037]
离地检测模块包括均与判断模块电连接的离地高度检测模块、滑跑距离获取单元以及速度获取单元,判断模块还与侧偏检测单元电连接。
[0038]
离地高度检测模块检测出无人机还处于地面上,进而通过速度获取单元获取到无人机地速20m/s以下且通过侧偏检测单元检测到侧偏距5m以上,或者通过滑跑距离获取单元获取到无人机滑跑距离600m以上时,则判断模块判断出终止起飞。
[0039]
本发明的有益效果是:本发明一种大中型固定翼无人机自动起飞控制方法及系统,在发送起飞指令后,可自主的完成无人机的起飞检查、起飞滑跑、纠偏控制、离地爬升、模态切换、离地后控制参数的切换和自动切入飞行航线,以及起飞过程中的飞行参数监控,若参数出现异常,可自动终止起飞,从而使大中型无人机的起飞可以做到完全自主控制,不需要人工参与。
附图说明
[0040]
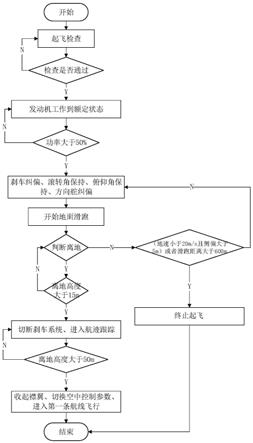
图1是本发明一种大中型固定翼无人机自动起飞控制方法的流程图;
[0041]
图2是本发明一种大中型固定翼无人机自动起飞控制系统的结构示意图。
具体实施方式
[0042]
下面结合附图以及具体实施方式对本发明进行详细说明。
[0043]
本发明提供了一种大中型固定翼无人机自动起飞控制方法,如图1所示,包括以下步骤:
[0044]
步骤1、无人机起飞前检查,检查项目包括无线电高度、机场高度、初始侧偏、航向对准情况、桨距是否为小距(桨距操纵杆设有小距和大距挡位,相比大距,小距的桨距较小)、发动机是否处于暖车,当无线电高度和无人机当前位置的高度一致、机场高度与机场海拔高度一致、初始侧偏5m以下、航向偏差20度以下、桨距为小距且发动机处于暖车时,则检查通过,之后地面站发送给无人机起飞指令。
[0045]
步骤2、无人机进入起飞状态后发动机开始运转,当发动机功率达到总功率的50%以上时,开启刹车纠偏和方向舵纠偏,基于侧偏量进行刹车纠偏,基于真航向进行方向舵纠偏,纵向采用俯仰角保持,横向采用滚转角保持;
[0046]
其中开启刹车纠偏具体为,当出现侧偏量时,根据公式(1)给出刹车量进行纠偏:
[0047]
[0048]
式(1)中,δb为刹车量,为刹车控制中的偏航角偏差比例系数,ψh为航向角,ψ
cmd
为跑道航向,为刹车控制中的侧偏量比例系数,dy为偏离跑道中线的侧偏距;
[0049]
方向舵基于真航向进行纠偏具体为,当真航向出现偏差时,根据公式(2) 给出方向舵偏转值进行纠偏:
[0050][0051]
式(2)中,δr为方向舵角度,为方向舵纠偏中的航向角偏差比例系数,为方向舵纠偏中的侧偏量比例系数,为偏航角速度的比例系数,r 为偏航角速度;
[0052]
根据公式(3)给出升降舵角度数值,使俯仰角保持定值:
[0053][0054]
式(3)中,δe为升降舵角度,为升降舵控制中俯仰角偏差的比例系数,θ为俯仰角,θ
cmd
为俯仰角指令,为俯仰角速度的比例系数,q俯仰角速度;θ
int
为积分项,由公式(4)求得:
[0055][0056]
式(4)中,为积分系数,θ
cmd_int
为俯仰角指令的积分项;
[0057]
根据公式(5)给出副翼角度数值,使滚转角保持定值:
[0058][0059]
式(5)中,δa为副翼角度,为副翼控制中的滚转角偏差比例系数,φ为滚转角,φ
cmd
为滚转角指令,为滚转角速度的比例系数,p为滚转角速度。
[0060]
步骤3、无人机开始地面滑跑后进行离地检测,若检测出无人机还处于地面上,则通过判断无人机地速与侧偏距、或者通过判断无人机滑跑距离决定是否终止起飞;若检测出无人机已经离地且离地高度在15m以上时,切断刹车控制,进入航迹跟踪;其中,判断无人机地速20m/s以下且侧偏距5m 以上,或者无人机滑跑距离600m以上时,则终止起飞;反之,则进入步骤 2。
[0061]
步骤4、无人机离地高度达到50m以上时收起襟翼,切换至空中控制参数,进入预定航线飞行。
[0062]
本发明还提供了一种采用上述大中型固定翼无人机自动起飞控制方法的控制系统,如图2所示,包括起飞检查模块,起飞检查模块上依次电连接有地面站控制模块和发动机调控单元,起飞检查模块上还电连接有纠偏控制模块和判断模块,纠偏控制模块上电连接有发动机功率检测单元,判断模块上电连接有离地检测模块和状态切换模块;具体为:
[0063]
起飞检查模块,用于在无人机起飞前通过发动机状态检测单元检测发动机是否处于暖车、桨距操纵杆位置检测模块检测桨距是否为小距、无线电高度检测单元检测无线电高度、机场高度检测单元检测机场高度、航向检测单元检测航向对准情况、侧偏检测单元检测初始侧偏,当无线电高度和无人机当前位置的高度一致、机场高度与机场海拔高度一致、初始侧偏5m以下、航向偏差20度以下、桨距为小距且发动机处于暖车时,则检查通过。检查
通过后通过地面站控制模块向发动机调控单元发出起飞指令。
[0064]
纠偏控制模块,在无人机进入起飞状态后发动机开始运转,发动机功率检测单元检测到发动机功率达到总功率的50%以上时,用于通过刹车纠偏单元开启刹车纠偏并基于侧偏检测单元检测的侧偏量进行刹车纠偏,以及通过方向舵纠偏单元开启方向舵纠偏并基于航向检测单元检测的真航向进行方向舵纠偏;纵向通过升降舵角度调节单元调节俯仰角并通过升降舵角度检测单元保持,横向通过副翼角度调节单元调节滚转角并通过副翼角度检测单元保持;
[0065]
离地检测模块,用于无人机开始地面滑跑后进行离地检测,若离地高度检测模块检测出无人机还处于地面上,进而通过速度获取单元获取到无人机地速20m/s以下且通过侧偏检测单元检测到侧偏距5m以上,或者通过滑跑距离获取单元获取到无人机滑跑距离600m以上时,则判断模块判断出终止起飞;若离地高度检测模块检测出无人机已经离地且离地高度在15m以上时,则判断模块判断出切断刹车控制,进入航迹跟踪;
[0066]
状态切换模块,离地高度检测模块检测出无人机离地高度达到50m以上时判断模块判断出收起襟翼,用于切换至空中控制参数,进入预定航线飞行。
[0067]
通过上述方式,本发明一种大中型固定翼无人机自动起飞控制方法及系统,在发送起飞指令后,可自主的完成无人机的起飞检查、起飞滑跑、纠偏控制、离地爬升、模态切换、离地后控制参数的切换和自动切入飞行航线,以及起飞过程中的飞行参数监控,若参数出现异常,可自动终止起飞,从而使大中型无人机的起飞可以做到完全自主控制,不需要人工参与。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1