可自适应拼接角度的空间细胞星装置的制作方法
:
1.本发明涉及面向在轨服务的可重构细胞卫星制造技术领域,具体的说是一种利用涡轮蜗杆自锁功能精确控制细胞卫星侧板转动角度、具有侧板角度调节精度高、对接锁止可靠、拓扑关系变化灵活、拼接航天器自由度高等特点的侧板角度可调式的可自适应拼接角度的空间细胞星装置。
背景技术:
2.相比于传统航天器,目前的模块化航天器已经在设计、制造和部署阶段大大缩短了时间周期,但是依然存在成本高、功能简单、通用性差、重构和升级能力差等问题。细胞星既在航天器在轨快速构建、在轨维修、功能扩展等方面发挥重要作用,还能拼接成在轨燃料补给站、深空探测中转站、巨型运载宇宙飞船、天基太阳能电站、空间阵列式望远镜等诸多构型。
3.考虑到未来建造可拼接巨型航天器的需求,要求关节细胞星具有标准独立且精确的角度调节机构,并且满足可更换、易操作和旋转角度锁定等需求。目前国外在细胞卫星上已经诸多研究,如美国研究的超集成细胞星hisat和himast、日本基于“可重构空间系统”(reconfigurab le space system,rss)提出的概念"细胞卫星"(cellularsatelite,cellsat)、德国的在轨组装项目的“卫星智能模块”(intelligentbuilding blocks for on-orbit satellite servicing,iboss),但上述研究没有涉及在轨可更换单元的空间角度调节结构设计。我国对于在轨可更换技术的研究起步较晚,目前多处于技术验证阶段并未进行实际应用,为了缩小我国在轨服务的模块化可重构航天器技术领域与国际先进研发水平的差距,同时提高我国在自主研发航天器的在轨维护性能,因而设计一种兼具角度调节等性能的在轨可更换单元对于提升我国在模块化航天器设计领域竞争力具有重要意义。
技术实现要素:
4.本发明针对现有技术存在的缺点和不足,提出了一种具有由直流步进电机驱动,采用蜗杆蜗轮传动形式,可以控制侧板转动并且断电自锁的角度可调侧板机构的可自适应拼接角度的空间细胞星装置。
5.本发明通过以下措施达到:
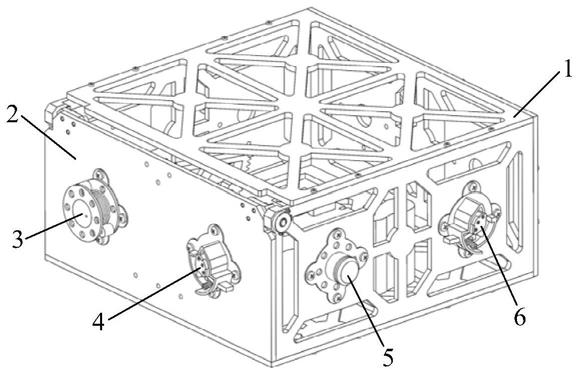
6.一种可自适应拼接角度的空间细胞星装置,设有箱体(1)、被动端接口(3)、锁紧机构a(4)、主动端接口(5)、锁紧机构b(6)、驱动组件(7)、蓄电池(8)、控制组件(9),箱体(1)呈长方体状,箱体(1)上设有角度可调侧板组件(2),其特征在于,所述角度可调侧板组件(2)包括侧板(2-1)、左销轴(2-2)、右销轴(2-3)、上固定块(2-4)、齿轮推杆(2-5)、下固定块(2-6)、螺钉;所述左销轴(2-2)、右销轴(2-3)、上固定块(2-4)、下固定块(2-6)与侧板 (2-1)通过螺钉连接;所述齿轮推杆(2-5)与上固定块(2-4)和下固定块(2-6)通过螺钉连接;所述角度可调侧板组件(2)与箱体(1) 通过左销轴(2-2)和右销轴(2-3)连接,使得角度可调侧板组件(2) 定轴转动;所述箱体(1)的4个面上均分布有锁紧机构与被动端接口(3)或主动端
接口(5),同一面上设置有主动端接口(5)或被动端接口(3),并且设置有锁紧机构a(4)或锁紧机构b(6),锁紧机构a(4)与锁紧机构b(6)在结构上镜像对称。
7.本发明所述被动端接口包括内端盖(3-1)、外壳(3-2)、弹簧a (3-3)、内壳(3-4)、电磁铁(3-5)、钢珠球(3-6);所述内壳(3-4) 与内端盖(3-1)螺纹配合;所述内壳(3-4)与外壳(3-2)间隙配合,二者可沿轴向相对滑动;所述弹簧a(3-3)置于外壳(3-2)和内壳 (3-4)之间;所述电磁铁(3-5)以胶粘的方式与外壳(3-2)固结;所述钢珠球(3-6)置于内壳(3-4)的球槽内。
8.本发明所述锁紧机构包括壳体(4-1)、固定板(4-2)、转动杆(4-3)、弹簧b(4-4)、螺钉;所述固定板(4-2)与壳体(4-1)通过螺钉连接;所述转动杆(4-3)固定于壳体(4-1)和固定板(4-2)之间,可定轴转动;所述弹簧b(4-4)的两端分别与转动杆(4-3)和壳体(4-1) 相连。
9.本发明驱动组件包括42步进电机(7-1)、电机安装板(7-2)、轴承安装板a(7-3)、轴承安装板b(7-4)、底板(7-5)、轴承座a(7-6)、轴承座b(7-7)、蜗杆轴承(7-8)、蜗杆(7-9)、轴承盖a(7-10)、齿轮轴轴承(7-11)、齿轮轴(7-12)、轴承盖b(7-13)、蜗轮(7-14)、开口销(7-15)、限位销(7-16)、套筒(7-17)、平键(7-18);控制组件包括中心控制器(9-1)、电机驱动板(9-2)、空心电位器(9-3);所述箱体(1)由五块镂空面板通过螺钉连接;所述驱动组件(7)与箱体(1)通过螺钉连接;所述蓄电池(8)以胶粘的方式固定于控制组件(9)的一侧;所述控制组件(9)与箱体(1)通过螺钉连接;所述42步进电机(7-1)与电机安装板(7-2)通过螺钉连接;所述电机安装板(7-2)与轴承安装板a(7-3)和轴承安装板b(7-4)通过螺钉连接;所述轴承安装板a(7-3)、轴承安装板b(7-4)、轴承座a (7-6)、轴承座b(7-7)与底板(7-5)通过螺钉连接;所述蜗杆(7-9) 通过蜗杆轴承(7-8)、轴承盖a(7-10)、轴承盖b(7-11)固定在轴承座上;所述蜗杆(7-9)通过非圆轴孔与42步进电机(7-1)电机轴配合;所述蜗轮(7-14)通过平键(7-18)、套筒(7-17)与齿轮轴(7-12) 进行轴向和周向定位;所述齿轮轴(7-12)通过齿轮轴轴承(7-11)、轴承盖b(7-13)固定在轴承安装板上;所述限位销(7-16)通过开口销(7-15)限制其在轴承安装板上的移动;所述中心控制器(9-1)、电机驱动板(9-2)与箱体(1)通过螺钉连接;所述空心电位器(9-3) 与箱体(1)通过螺钉连接,并且与右销轴(2-3)配合。
10.本发明中所述内壳(3-4)有4个球槽,间隔90
°
周向均匀分布于柱壁上。内壳(3-4)柱壁的厚度小于钢珠球(3-6)的直径。球槽在内壳(3-4)内壁的截面直径小于钢珠球(3-6)的直径,因此能限制钢珠球(3-6)不会向内壳(3-4)内部脱出;所述弹簧a(3-3)致使内壳(3-4)和外壳(3-2)相互远离,使得钢珠球(3-6)的一部分移出内壳(3-4)内壁,从而限制主动端接口(5)的移出;所述电磁铁 (3-5)以胶粘的方式与外壳(3-2)固结,当电磁铁(3-5)通电时,铁质的内壳(3-4)受磁力吸引,外壳(3-2)会压缩弹簧a(3-3)靠近内壳(3-4),钢珠球(3-6)向外移动至外壳(3-2)的环槽中,此时主动端接口(5)可以移出被动端接口(3);所述壳体(4-1)上设计与转动体(4-3)相配合的圆柱内表面,壳体(4-1)上留有转动体 (4-3)驱动手柄转动的充足空间。
11.本发明中所述主动端接口(5)和被动端接口(3)的对接具有严格的方向性,仅能进行轴向对接与解锁,对接完成后不限制轴向相对转动;主动端接口(5)与被动端接口(3)中部贯通,可为电气接口及其他连接部件提供安装空间。
12.本发明中所述锁紧机构a(4)和锁紧机构b(6)的对接需要在主动端接口(5)和被动
端接口(3)对接完成之后,两细胞星相对旋转才能对接,并且锁紧机构a(4)只能和锁紧机构b(6)对接;单个锁紧机构a(4)和锁紧机构b(6)对接完成后能够限制轴向移动和周向转动。
13.本发明中所述电机驱动板(9-2)控制42步进电机(7-1)的转速输出,并通过空心电位器(9-3)与中心控制器(9-1)形成的闭环控制系统进行侧板(2-1)转动角度的角度反馈。42步进电机(7-1)型号为42bygh60,电机驱动板(9-2)型号为tb6600,空心电位器(9-3) 型号为r24hs,中心控制器(9-1)型号为arduino nuo r3,蓄电池 (8)为24v锂电池组。
14.本发明与现有技术相比的有益效果是:本发明为在轨拼接式航天器提供了标准独立且精确的角度调节机构,丰富了航天器的构型,增加了航天器的自由度数。同时本发明采用蜗轮蜗杆传动机构作为运动的输入机构,利用蜗轮蜗杆的自锁特性可以在断电情况下保持角度可调侧板停留在给定角度,提高了航天器运动的安全性。本发明的齿轮推杆与齿轮轴采用外啮合的方式可以有效减小齿轮推杆的尺寸,进一步节省箱体空间,减轻细胞星整体质量。本发明的角度可调侧板与箱体的连接依靠对称分布于侧板两端的左销轴和右销轴,左销轴和右销轴短小且紧实的设计在保证旋转侧板工作要求的基础上,可以简化安装步骤并节省箱体空间。为了保证相邻细胞星之间的电、液传输,主动端接口与被动端接口中部贯通,为电气接口及其他连接部件提供安装空间。
附图说明:
15.附图1是本发明的结构示意图。
16.附图2是本发明的内部结构俯视图。
17.附图3是本发明中角度可调侧板组件示意图。
18.附图4是本发明中驱动组件示意图。
19.附图5是本发明中蜗轮安装示意图。
20.附图6是本发明中锁紧机构a(弹簧b伸长状态)。
21.附图7是本发明中转动体的结构示意图。
22.附图8是本发明中固定板的结构示意图。
23.附图9是本发明中被动式对接接口和主动式对接接口的结构示意图。
24.附图10是本发明中被动式接口剖视图。
25.附图11是本发明中内壳的结构示意图。
26.附图12是本发明中主动端接口的结构示意图。
27.附图13是主动端接口和被动端接口对接完成示意图。
28.附图14是锁紧机构a和锁紧机构b对接完成状态示意图。
具体实施方式:
29.下面结合附图和具体实施过程,对本发明做进一步的说明。
30.如附图所示,本发明所述一种自适应拼接角度及可靠对接的空间细胞星包括箱体(1)、角度可调侧板组件(2)、被动端接口(3)、锁紧机构a(4)、主动端接口(5)、锁紧机构b(6)、驱动组件(7)、蓄电池(8)、控制组件(9)、螺钉;角度可调侧板组件包括侧板(2-1)、左销轴(2-2)、右销轴(2-3)、上固定块(2-4)、齿轮推杆(2-5)、下固定块(2-6)、螺钉;被动端接口包括内端盖(3-1)、外壳(3-2)、弹簧a(3-3)、内壳(3-4)、电磁铁(3-5)、钢珠球(3-6);锁紧机
构包括壳体(4-1)、固定板(4-2)、转动杆(4-3)、弹簧b(4-4)、螺钉;驱动组件包括42步进电机(7-1)、电机安装板(7-2)、轴承安装板a (7-3)、轴承安装板b(7-4)、底板(7-5)、轴承座a(7-6)、轴承座 b(7-7)、蜗杆轴承(7-8)、蜗杆(7-9)、轴承盖a(7-10)、齿轮轴轴承(7-11)、齿轮轴(7-12)、轴承盖b(7-13)、蜗轮(7-14)、开口销 (7-15)、限位销(7-16)、套筒(7-17)、平键(7-18);控制组件包括中心控制器(9-1)、电机驱动板(9-2)、空心电位器(9-3);所述箱体(1)由五块镂空面板通过螺钉连接;所述角度可调侧板组件(2) 与箱体(1)通过左销轴(2-2)和右销轴(2-3)连接,从而使得角度可调侧板组件(2)可以定轴转动;所述被动端接口(3)、锁紧机构 a(4)、主动端接口(5)、锁紧机构b(6)与箱体(1)通过螺钉连接;所述驱动组件(7)与箱体(1)通过螺钉连接;所述蓄电池(8) 以胶粘的方式固定于控制组件(9)的一侧;所述控制组件(9)与箱体(1)通过螺钉连接;所述左销轴(2-2)、右销轴(2-3)、上固定块 (2-4)、下固定块(2-6)与侧板(2-1)通过螺钉连接;所述齿轮推杆(2-5)与上固定块(2-4)和下固定块(2-6)通过螺钉连接;所述内壳(3-4)与内端盖(3-1)螺纹配合;所述内壳(3-4)与外壳(3-2) 间隙配合,二者可沿轴向相对滑动;所述弹簧a(3-3)置于外壳(3-2) 和内壳(3-4)之间;所述电磁铁(3-5)以胶粘的方式与外壳(3-2) 固结;所述钢珠球(3-6)置于内壳(3-4)的球槽内;所述固定板(4-2) 与壳体(4-1)通过螺钉连接;所述转动杆(4-3)固定于壳体(4-1) 和固定板(4-2)之间,可定轴转动;所述弹簧b(4-4)的两端分别与转动杆(4-3)和壳体(4-1)相连;所述42步进电机(7-1)与电机安装板(7-2)通过螺钉连接;所述电机安装板(7-2)与轴承安装板a(7-3)和轴承安装板b(7-4)通过螺钉连接;所述轴承安装板a (7-3)、轴承安装板b(7-4)、轴承座a(7-6)、轴承座b(7-7)与底板(7-5)通过螺钉连接;所述蜗杆(7-9)通过蜗杆轴承(7-8)、轴承盖a(7-10)、轴承盖b(7-11)固定在轴承座上;所述蜗杆(7-9) 通过非圆轴孔与42步进电机(7-1)电机轴配合;所述蜗轮(7-14) 通过平键(7-18)、套筒(7-17)与齿轮轴(7-12)进行轴向和周向定位;所述齿轮轴(7-12)通过齿轮轴轴承(7-11)、轴承盖b(7-13) 固定在轴承安装板上;所述限位销(7-16)通过开口销(7-15)限制其在轴承安装板上的移动;所述中心控制器(9-1)、电机驱动板(9-2) 与箱体(1)通过螺钉连接;所述空心电位器(9-3)与箱体(1)通过螺钉连接,并且与右销轴(2-3)配合。
31.本实施方案中的蓄电池(8)的作用是为控制组件(9)和电磁铁 (3-5)提供电力;左销轴、右销轴的作用是确定侧板的旋转中心;齿轮推杆的作用是推动与之固结的侧板以实现角度可调侧板的角度调节,齿轮推杆上设计的限位槽在齿轮推杆的旋转过程中与限位销进行配合以限制角度可调侧板的最大调节角度;下固定块的作用是增加侧板的受力长度,提高侧板转动的稳定性;内壳的作用是容纳四个钢珠球,并限制钢珠球向内脱出;外壳的作用是提供容纳钢珠球的环槽,并促使钢珠球的移动;弹簧a的作用是使得内壳和内端盖在断电情况下远离,使得钢珠球锁止主动端接口;电磁铁的作用是在通电状态下吸引铁质的内壳,使得内壳压缩弹簧a靠近内端盖,从而钢珠球可以向外移动;固定板的作用是利用自身的圆柱体与转动体的圆弧槽配合,使得转动杆可以定轴转动,同时在锁紧状态下提供轴向限位;转动体的作用是在锁紧状态下提供径向限位;弹簧b的作用是保持转动体在初始状态,在锁紧机构解锁之后使转动体复位;直流无刷电机的作用是提供稳定的动力源,并将动力传递给蜗杆;电机安装板的作用是保证直流无刷电机主体的固定;底板的作用是为轴承安装板a、轴承安装板b、轴承座a、轴承座b的安装提供定位;开口销的作用防止限位销从轴承安装板中脱出;套筒的作用是为蜗轮提供轴向定位;平键的作用是为蜗轮提供周向定位;
电机驱动板的作用是控制42步进电机的转角;空心电位器的作用是实时监测角度可调侧板组件的转角;
32.其工作过程如下;角度可调侧板角度调节阶段,42步进电机正转驱动蜗杆旋转,蜗杆带动蜗轮旋转,齿轮轴带动齿轮推杆旋转,齿轮推杆推动旋转侧板进行旋转达到所需角度。不断增大调节角度,限位杆与齿轮推杆相碰从而达到最大调节角度。角度可调侧板归位阶段, 42步进电机反转带动旋转侧板回转以到达起始设定位置。
33.两细胞星对接过程中有明确的顺序要求,此处记两细胞星分别为细胞星a和细胞星b。首先分别选定细胞星a和细胞星b的对接表面,两表面的接口总计为一个主动端接口、一个被动端接口、一个锁紧机构a、一个锁紧机构b。被动端接口的电磁铁通电,铁质的内壳受电磁铁吸引,使得内壳压缩弹簧a靠近内端盖,从而钢珠球可以向外移动,主动端接口和被动端接口沿轴向对接,电磁铁断电,弹簧a恢复原长,钢珠球内移,主动端接口和被动端接口锁止。主动端接口和被动端接口对接完成状态如图13所示。最后,两细胞星沿主动端接口轴线相对旋转,锁紧机构的转动体受到约束被迫转动,克服弹簧拉力达到对接完成状态,此时转动体约束解除,弹簧缩短,锁紧机构a 和锁紧机构b锁止。若要将两细胞星解锁,首先应解锁锁紧机构a 和锁紧机构b,再解锁主动端接口和被动端接口。拨动其中一个锁紧机构的转动体,使得转动体转动至状态,锁紧机构a和锁紧机构b 即可脱离。接下来解锁主动端接口和被动端接口,电磁铁通电,铁质的内壳受电磁铁吸引,使得内壳压缩弹簧a靠近内端盖,从而钢珠球可以向外移动,主动端接口脱出,电磁铁断电,弹簧a恢复原长,钢珠球内移,解锁完成。
34.本发明与现有技术相比的有益效果是:本发明设计了一种自适应拼接角度及可靠对接的空间细胞星,为在轨拼接式航天器提供了标准独立且精确的角度调节机构,丰富了航天器的构型,增加了航天器的自由度数。同时本发明采用蜗轮蜗杆传动机构作为运动的输入机构,利用蜗轮蜗杆的自锁特性可以在断电情况下保持角度可调侧板停留在给定角度,提高了航天器运动的安全性。本发明的齿轮推杆与齿轮轴采用外啮合的方式可以有效减小齿轮推杆的尺寸,进一步节省箱体空间,减轻细胞星整体质量。本发明的角度可调侧板与箱体的连接依靠对称分布于侧板两端的左销轴和右销轴,左销轴和右销轴短小且紧实的设计在保证旋转侧板工作要求的基础上,可以简化安装步骤并节省箱体空间。为了保证相邻细胞星之间的电、液传输,主动端接口与被动端接口中部贯通,为电气接口及其他连接部件提供安装空间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1