模块化无人驾驶飞行器连接系统的制作方法
1.本公开总体上涉及飞行器,并且更具体地涉及一种模块化无人驾驶飞行器连接系统。
背景技术:
2.近年来,无人驾驶飞行器(uav)或无人机已用于飞行很远的距离以运输有效负载(例如包裹、供应品、设备等)或收集信息。
技术实现要素:
3.一种用于与uav一起使用的示例连接系统,包括:突片(tab),该突片从空气动力学主体或框架中的一个延伸;以及狭槽,该狭槽接收突片,该狭槽定位在空气动力学主体或框架中的另一个上,该突片在与uav的行进方向平行的方向上插入到狭槽中。
4.一种用于将空气动力学主体耦接至无人驾驶飞行器的框架的示例性方法,包括:将从空气动力学主体或框架中的一个延伸的突片对准至定位在空气动力学主体或框架中的另一个上的狭槽;将突片放置在狭槽中;以及使突片在与uva的行进方向平行的方向上沿狭槽滑动,以将空气动力学主体耦接至框架。
5.一种用于与无人驾驶飞行器(uav)一起使用的示例连接器,包括:uav的空气动力学主体或者框架中的一个上的长椭圆形主体,该长椭圆形主体由定位在空气动力学本体或框架中的另一个上的狭槽接收,该长椭圆形主体在与uav的行进方向平行的方向上插入到狭槽中。
附图说明
6.图1是其中可以实施本文所公开的实例的示例无人驾驶飞行器(uav)。
7.图2描绘根据本公开的教导的示例连接系统。
8.图3a和图3b描绘根据本公开的教导的示例耦接过程的步骤。
9.图4是图2至图3b所示的连接系统的示例框架的详细视图。
10.图5a和图5b是图2至图4的示例性连接系统的示例性框架的详细视图。
11.图6a和图6b是图2至图5b的示例连接系统的附加详细视图。
12.图7a至图7d描绘可以在本文所公开的实例中实施的示例方向舵-升降舵布置。
13.图8a和图8b描绘处于组装状态下的组装的方向舵-升降舵。
14.图9是表示用于实现图2至图8b的示例连接系统的示例方法的流程图。
15.附图未按比例进行绘制。而是,可以在附图中放大层或区域的厚度。一般而言,在整个附图和所附书面描述中将使用相同的参考标号来以指代相同或相似的部分。如在本文所使用的,除非另有说明,术语“上方”描述了两个部分相对于地表的关系。如果第二部分具有在地表与第一部分之间的至少一个部分,则第一部分在第二部分上方。同样,如在本文所使用的,当第一部分比第二部分更靠近地表时,第一部分在第二部分“下方”。如上所描述
的,第一部分可以位于第二部分上方或下方,具有以下中的一个或多个:其间的其他部分,其间没有其他部分,与第一部分和第二部分接触,或者与第一部分和第二部分彼此不直接接触。如在本专利中使用的,陈述的任何部分以任何方式处于(例如,定位在、位于、设置在、或形成在等)另一部分上,指示参考部分与另一部分相接触,或者参考部分在另一部分上方并且有一个或多个中间部分位于其间。如在本文所使用的,连接参考(例如,附接、耦接、连接和接合)可以包括在由连接参考引用的元件之间的中间构件和/或在这些元件之间的相对移动,除非另外指明。照此,连接参考不一定推断两个元件直接连接和/或彼此成固定关系。如在本文所使用的,陈述任何部分与另一部分“接触”被定义为是指在这两个部分之间不存在中间部分。
16.除非另外明确说明,否则在此使用诸如“第一”、“第二”、“第三”等的描述符,而不用暗示或以其他方式指示优先级、物理顺序、列表中的安排、和/或以任何方式排序的任何含义,但是为了易于理解所公开的实例,这些描述符仅用作标记和/或任意名称来区分元件。在一些实例中,在详细描述中,描述符“第一”可以用于指代元件,而在权利要求中,同一元件可以被指代为具有诸如“第二”或“第三”的不同描述符。在此类示例中,应当理解,此类描述符仅用于清楚地识别可能(例如)以其他方式共享相同名称的那些元件。如在本文所使用的,“大约”和“约”是指由于制造公差和/或其他现实世界缺陷可能不精确的尺寸。
具体实施方式
17.公开了一种模块化无人驾驶飞行器(uav)连接系统。一些已知的uav基于重量(例如,结构重量、携带的燃料、有效负载等)以及空气动力学设计具有有限的飞行范围。此外,大多数已知uav是针对特定应用需要(例如,任务需要、有效负载要求等)设计的,因此,这些已知uav的部件通常不是可拆卸的和/或可替换的(例如,用于运输)。
18.本文所公开的实例能够实现重量轻、易于储存/运输、高度可操纵、高度可适应且相对低成本的uav。本文所公开的实例使得不同部件能够被替换和/或交换以用于不同的应用,从而使得uav能够适用于不同的用途。本文所公开的实例能够实施成使得诸如机翼或方向舵-升降舵的空气动力学主体能够互换,同时以足够的强度支撑空气动力学主体以用于飞行。
19.本文所公开的实例包括一种用于与uav一起使用的连接系统。连接系统包括从空气动力学主体或框架中的一个延伸的突片。连接系统还包括用于接收突片的狭槽。狭槽定位在空气动力学主体或框架的另一个上。进一步,根据本文所公开的实例,突片沿与uav的行进方向对齐的方向(例如,沿与uav的行进方向相同的方向和路径,沿与uav的行进方向相反的方向,等等)(例如,在行进方向的5度以内)插入到狭槽中。
20.在一些实例中,锁销被实施为将突片捕获在狭槽中。在一些此类实例中,锁销是弹簧加载的。在一些实例中,突片是楔形的或燕尾形的。在一些实例中,空气动力学主体是机翼。在其他实例中,空气动力学主体是组合的方向舵-升降舵。
21.如在本文所使用的,术语“可释放地耦接”指一种物体,该物体旨在通过多个循环被耦接和释放,具有相对小的塑性变形或没有塑性变形。因此,术语“可释放地耦接”可以指卡扣配合、滑动配合、磁性连接、锁定接合(例如,弹簧加载销、杠杆锁等)。
22.图1是其中可以实施本文所公开的实例的uav 100。uav 100是模块化的并且可适
100的行进方向。在其他实例中,纵向轴线103与无人飞行器100的行进方向不同。
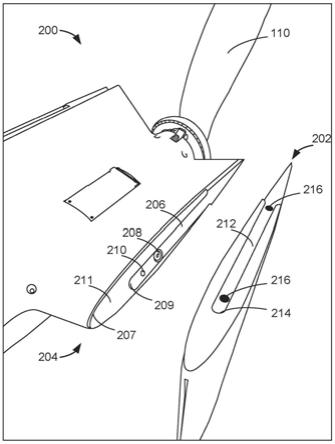
30.图2描绘了根据本公开的教导的示例连接系统200。在所示实例中,空气动力学主体202(其可以被实施为方向舵-升降舵108和/或机翼116)可释放地耦接至框架204,该框架可以是图1所示的机身102和/或尾桁106的一部分。
31.示例框架204支撑和/或定位马达110。在该实例中,框架204包括支撑在表面207上的突片(例如,燕形突片、椭圆形突片等)206。示例性突片206具有大致长圆形或椭圆形形状(例如,长椭圆形主体)并且具有圆形的远端209、以及将突片206耦接到框架204的耦接器208。进一步,突片206包括孔210并且从基座211延伸和/或耦接至基座211,该基座耦接至前述表面207和/或与前述表面207成一体。
32.空气动力学主体202支撑uav 100的至少一个空气动力学表面。空气动力学主体202包括狭槽212,该狭槽与突片206互补地成形并且被实施为空气动力学主体202的凹口、凹槽和/或扇形部。示例狭槽212包括弯曲的远端214和开口或孔216。
33.为了将空气动力学主体202可释放地耦接至框架204,突片206与狭槽212对准并且插入到狭槽212中。在该实例中,突片206和狭槽212的形状和定向成使得引导将突片206插入到狭槽212中,以保持空气动力学主体202与框架204之间的必要程度的对准。在该实例中,突片206的插入运动在uav 100的行进方向的5度以内,使得在uav 100的飞行期间作用在空气动力学主体202上的压力有助于将空气动力学主体202固定至框架204。换句话说,突片206的插入方向有利于在uav 100的飞行期间将空气动力学主体202固定至框架204。进一步,示例突片206包括燕尾形状以促进其插入和对准到狭槽212。然而,在其他实例中,空气动力学主体202包括突片,而框架204包括狭槽。
34.图3a和图3b描绘根据本公开的教导的示例耦接过程的步骤。转到图3a,当空气动力学主体202可释放地耦接至框架204时,空气动力学主体202被示出为在总体上由箭头302指示的方向上朝向马达110移动。在该实例中,箭头302的方向与和uav 100的行进方向相反的方向相关联。
35.图3b示出了完全耦接至框架204的空气动力学主体202。如下面将结合图8b更详细地讨论的,锁定机构或装置能够被实施为进一步将空气动力学主体202固定至框架204。特别地,锁销(例如,弹簧加载的锁销)、卡扣、杠杆、锁定臂等能够被实施为将空气动力学主体202固定至框架204。
36.图4是图2至图3b所示的连接系统200的示例框架204的详细视图。在图4所示的视图中,突片206远离基座211延伸。进一步,远端209被示为在多个方向上具有曲线(例如,三维曲线)。而且,远端209成角度地远离基座211。
37.图5a和图5b是图2至图4的示例性连接系统的示例性框架204的详细视图。转到图5a,表面207示出为具有耦接点502以将基座211固定到突片206。基座211可以用任何适当的耦接(包括但不限于机械紧固件、化学紧固件、结合、焊接等)固定到突片206。
38.图5b是框架204的一部分的侧视图。在所示出的实例中,基座211被示出为具有突片206。如图5中可见,突片206包括凹口504和倾斜表面506,以便于将突片206对准并且插入到狭槽212中。
39.图6a和图6b是图2至图5b的连接系统200的示例框架204的附加详细视图。图6a是突片206的详细视图。在该实例中,突片206包括圆角602,以在流线型体202(未示出)耦接至
框架204时便于突片206相对于狭槽212(未示出)的相对紧密配合。
40.转到图6b,示出对应于图6a的a-a的详细截面视图。具体地,示出了突片206的截面轮廓。在该实例中,基座610被示出为具有成角度的臂(例如,垂直臂)612。在该实例中,臂612彼此成约90度的角度。然而,替代地可以实现任何适当的角间距。
41.图7a至图7d描绘可以在本文所公开的实例中实施的示例方向舵-升降舵布置700、710、720、730。图7a描绘了在uav 100上实施的方向舵-升降舵布置700。在该实例中,方向舵-升降舵108以小于180度(例如,60度、90度、100度、120度、135度等)的角度彼此成角度。
42.图7b描绘了示例方向舵-升降舵布置710。在所示的实例中,方向舵-升降舵108彼此间隔开180度。在该实例中,方向舵-升降舵108相对平行于地面。然而,方向舵-升降舵108可以从地面成角度。
43.图7c描绘了示例方向舵-升降机布置720。在该实例中,方向舵-升降舵108水平地布置,但是实施了竖直稳定器722。
44.图7d描绘了示例方向舵布置730,该方向舵布置类似于图7a的方向舵布置700,但反而包括方向舵-升降舵108,该方向舵-升降舵朝向地面向下而不是向上并远离地面定向。
45.图8a和8b描绘了处于组装状态下的示例方向舵-升降舵108。转到图8a,空气动力学主体202实施为方向舵-升降舵108并且可释放地耦接至框架204。
46.图8b是对应于图8a的区域a的详细视图。在所示的实例中,方向舵-升降舵108耦接至基座211。在该实例中,弹簧柱塞(例如,aisi 304柱塞)802被示为具有通过翼梁806捕获、定位和/或对准的锁定销(例如,弹簧加载销、锁销、弹簧销、钝化的18-8cres销等)804,该翼梁可以至少部分地由碳纤维构成。
47.在该实例中,锁销804从方向舵-升降舵108延伸并且将由基座211和/或框架204的孔接收,以将方向舵-升降舵108和/或空气动力学主体202固定至框架204。因此,方向舵-升降舵108和/或空气动力学主体202锁定到框架204,从而防止方向舵-升降舵108从框架204掉落(例如,在uav 100的飞行期间)或者意外地从框架204去除。
48.图9是表示用于实现图2至图8b的示例连接系统的示例方法900的流程图。方法900开始于将空气动力学主体202附接和/或耦接至框架204,该空气动力学主体在该实例中是方向舵-升降舵108。
49.在框902中,使空气动力学主体202的突片206与框架204的狭槽212对准。进一步,在该实例中,突片206和狭槽212限定滑动配合。在其他实例中,突片206和狭槽212限定摩擦配合。在该实例中,突片206总体上是燕尾形的,具有弯曲表面以与狭槽212的弯曲表面接合。
50.在框904处,在所示实例中,在突片206与狭槽212对准后,将突片206放置在狭槽212中。
51.在框906中,使空气动力学主体202和/或突片206相对于框架204滑动。在该实例中,将突片206沿在uav 100的行进方向的5度内的运动方向插入到狭槽212中并且在狭槽212内滑动,从而使得uav 100在飞行期间遇到的压力能够进一步将空气动力学主体202固定至框架204。在一些其他实例中,突片206在与uav 100的行进方向相反的方向上(例如,在与uav 100的行进方向相反的方向的5度内)插入和滑动。在一些实例中,突片206是弹簧加载的,以在空气动力学主体202与框架204之间提供额外的保持力。
52.在框908处,将空气动力学主体202锁定至框架204并且过程结束。在所示的实例中,锁销(诸如,图8b中所示的锁销804)用于将空气动力学主体202锁定至框架204。
53.实例1包括一种用于与无人驾驶飞行器一起使用的连接系统。连接系统包括:突片,该突片从空气动力学主体或框架中的一个延伸;以及狭槽,该狭槽接收突片,该狭槽定位在空气动力学主体或框架中的另一个上,该突片在与uav的行进方向平行的方向上插入到狭槽中。
54.实例2包括如实例1中所限定的连接系统,还包括锁销,该锁销延伸到突片或狭槽中。
55.实例3包括如实例2中所限定的连接系统,其中,锁销是弹簧加载的。
56.实例4包括如实例1至3中的任一项所限定的连接系统,其中,突片是燕尾形的。
57.实例5包括如实例1至4中的任一项所限定的连接系统,其中,所述空气动力学主体是机翼。
58.实例6包括如实例1至4中的任一项所限定的连接系统,其中,所述空气动力学主体是组合的方向舵-升降舵。
59.实例7包括如实例6所限定的连接系统,其中,组合的方向舵-升降舵相对于框架转动。
60.实例8包括如实例1至7所限定的连接系统,其中,突片与框架的基座成角度。
61.实例9包括如实例1至8中的任一项所限定的连接系统,其中,突片包括长椭圆形形状。
62.实例10包括用于将空气动力学主体耦接至uav的框架的方法。该方法包括:将从空气动力学主体或框架中的一个延伸的突片对准至定位在空气动力学主体或框架中的另一个上的狭槽;将突片放置在狭槽中;以及使突片在与uva的行进方向平行的方向上沿狭槽滑动,以将空气动力学主体耦接至框架。
63.实例11包括如实例10所限定的方法,还包括将空气动力学主体锁定至框架。
64.实例12包括如实例11所限定的方法,其中,空气动力学主体经由锁销锁定至框架。
65.实例13包括如实例12所限定的方法,其中,锁销是弹簧加载的。
66.实例14包括如实例10至13中的任一项所限定的方法,其中,突片与框架的基座成角度。
67.实例15包括如实例10至14中任一项所限定的方法,其中,将突片与狭槽对准包括将突片的长椭圆形主体放置到与长椭圆形主体互补成形的狭槽中。
68.实例16包括一种用于与uav一起使用的连接器。连接器包括:uav的空气动力学主体或者框架中的一个上的长椭圆形主体,该长椭圆形主体由定位在空气动力学本体或框架中的另一个上的狭槽接收,该长椭圆形主体在与uav的行进方向平行的方向上插入到狭槽中。
69.实例17包括如实例16所限定的连接器,其中,长椭圆形主体具有燕尾形状。
70.实例18包括如实例16或17中任一项所限定的连接器,其中,长椭圆形主体在该长椭圆形主体的远端处具有圆形曲线。
71.实例19包括如实例16至18中任一项所限定的连接器,还包括用于接收锁销的孔。
72.实例20包括如实例19中所限定的连接器,其中,锁销是弹簧加载的。
73.从前述内容,将理解的是,已经公开了能够实现飞形器部件的模块化连接的示例方法、装置和制品。本文公开的实例是成本有效的并且使得不同零部件能够互换。此外,本文公开的示例部件连接通过在飞行期间作用在飞行器上的压力而被加强。
74.虽然本文已经公开了某些示例方法、装置和制品,但是本专利的覆盖范围不限于此。相反,本专利覆盖完全落入本专利的权利要求的范围内的所有方法、装置和制品。
75.所附权利要求由此通过引用结合到此详细描述中,其中每项权利要求独立地作为本公开的单独的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1