一种外卖配送用无人机
1.本发明涉及一种飞行器相关设备,更具体的说是一种无人机。
背景技术:
2.随着科技的发展时代的进步,越来越多的高端设备被引入到我们的生活和工作当中,在外卖配送行业中,外卖员通常都需要乘坐电梯或爬楼进行外卖配送,其人力及时间成本较高,现有技术公开的外卖无人机大多结构较为简单,对带有汤汁的外卖商品来说,其爬升过程中容易撒漏,造成较大的安全隐患,为节约外卖配送人力成本,避免安全事故的发生,因此发明了一种无人机。
技术实现要素:
3.本发明涉及一种无人机设备,更具体的说是一种无人机,通过机体主体提供爬升动力及爬升方向的控制,防漏溢装置安装固定在机体主体上,防止带汤汁的外卖撒溢,以确保设备运行的安全性及实用性,自动卸放装置安装固定在防漏溢装置上,对外卖提供保温及自动投放以节约外卖配送的时间、人力成本的功能。
4.为解决上述技术问题,一种无人机,包括机体主体、防漏溢装置、自动卸放装置,通过机体主体安装其他的装置并提供爬升动力及控制,防漏溢装置确保在无人机爬升时外卖无撒漏溢出,自动卸放装置实现外卖定点定位投放及保温,实现对节约外卖配送的时间、人力成本的功能,其特征在于:防漏溢装置安装固定在机体主体上,自动卸放装置安装固定在防漏溢装置上。
5.作为本技术方案的进一步优化,本发明一种无人机所述的机体主体包括机体上罩、机体下罩、爬升扇叶、联动控制轴、扇叶轴、扇叶马达、视觉控制模块、连接座,机体下罩通过螺钉安装固定在机体上罩上,爬升扇叶安装固定在扇叶轴上,联动控制轴转动安装在视觉控制模块上,扇叶轴通过轴承转动安装在机体上罩上,扇叶轴通过轴承转动安装在机体下罩上,扇叶马达安装固定在机体下罩上,视觉控制模块安装固定在机体上罩上,连接座安装固定在机体下罩上。
6.作为本技术方案的进一步优化,本发明一种无人机所述的防漏溢装置包括装置连接架、开合动力输入轴、开合动力中转轴、开合主动锥齿、开合拨叉轴、开合被动锥齿、丝杠锁紧块、丝杠安装块、挂袋丝杠螺母、挂袋丝杠、挂袋块、滑台、开合拨叉、锁紧螺母、开合上拨盘、开合叶、开合固定盘,装置连接架安装固定在连接座上,开合动力输入轴通过轴承转动安装在连接座上,开合动力中转轴通过轴承转动安装在连接座上,开合主动锥齿安装固定在开合动力中转轴,开合拨叉轴通过轴承转动安装在装置连接架上,开合被动锥齿安装固定在开合拨叉轴上,开合被动锥齿和开合主动锥齿啮合,丝杠锁紧块安装固定在连接座上,丝杠安装块安装固定在连接座上,挂袋丝杠螺母通过轴承转动安装在丝杠安装块上,挂袋丝杠螺纹安装在挂袋丝杠螺母,挂袋块螺纹安装在挂袋丝杠上,滑台安装固定在丝杠安装块上,滑台滑动端安装固定在挂袋块上,开合拨叉安装固定在开合拨叉轴上,锁紧螺母螺
纹安装在开合拨叉上,开合上拨盘安装固定在开合拨叉上,开合叶铰链安装在开合上拨盘上,开合固定盘滑动安装在开合叶上。
7.作为本技术方案的进一步优化,本发明一种无人机所述的自动卸放装置包括保温箱控制模块、保温箱投放丝杠、保温箱丝杠螺母、保温箱铰链板、弹性降落架、保温箱、保温箱升降动力轴、保温箱扣合蜗杆轴、保温箱扣合蜗轮、保温箱合页轴,保温箱控制模块安装固定在装置连接架上,保温箱投放丝杠通过保温箱丝杠螺母螺纹安装在装置连接架上,保温箱丝杠螺母安装固定在装置连接架上,保温箱铰链板安装固定在保温箱投放丝杠上,弹性降落架安装固定在装置连接架上,保温箱铰链安装在保温箱铰链板上,保温箱升降动力轴转动安装在保温箱控制模块上,保温箱扣合蜗杆轴转动安装在保温箱控制模块上,保温箱扣合蜗轮和保温箱扣合蜗杆轴啮合,保温箱扣合蜗轮安装固定在保温箱合页轴上,保温箱合页轴转动安装在保温箱铰链板上,保温箱合页轴安装固定在保温箱上。
8.作为本技术方案的进一步优化,本发明一种无人机所述机体主体中,爬升扇叶、扇叶轴、扇叶马达均有四个。
9.作为本技术方案的进一步优化,本发明一种无人机所述防漏溢装置中,装置连接架有两个,开合叶有四个。
10.作为本技术方案的进一步优化,本发明一种无人机所述自动卸放装置中,保温箱投放丝杠、保温箱丝杠螺母、弹性降落架均有两个。
11.本发明一种无人机有益效果为:
12.本发明涉及一种无人机设备,更具体的说是一种无人机,实现了通过机体主体安装其他的装置并提供爬升动力及控制,防漏溢装置确保在无人机爬升时外卖无撒漏溢出,自动卸放装置实现外卖定点定位投放及保温,实现对节约外卖配送的时间、人力成本的功能。
附图说明
13.下面结合附图和具体实施方法对本发明做进一步详细的说明。
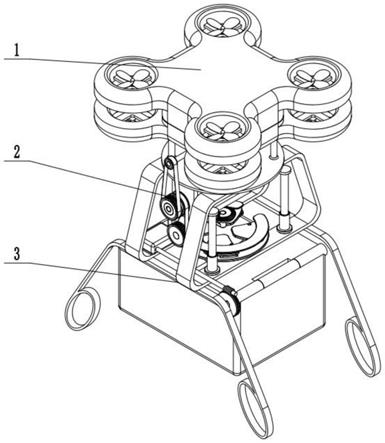
14.图1为本发明的整体结构示意图一。
15.图2为本发明的整体结构示意图二。
16.图3为本发明的机体主体结构示意图一。
17.图4为本发明的机体主体结构示意图二。
18.图5为本发明的防漏溢装置结构示意图一。
19.图6为本发明的防漏溢装置结构示意图二。
20.图7为本发明的防漏溢装置结构示意图三。
21.图8为本发明的自动卸放装置结构示意图。
22.图中:机体主体1;机体上罩101;机体下罩102;爬升扇叶103;联动控制轴104;扇叶轴105;扇叶马达106;视觉控制模块107;连接座108;防漏溢装置2;装置连接架201;开合动力输入轴202;开合动力中转轴203;开合主动锥齿204;开合拨叉轴205;开合被动锥齿206;丝杠锁紧块207;丝杠安装块208;挂袋丝杠螺母209;挂袋丝杠210;挂袋块211;滑台212;开合拨叉213;锁紧螺母214;开合上拨盘215;开合叶216;开合固定盘217;自动卸放装置3;保温箱控制模块301;保温箱投放丝杠302;保温箱丝杠螺母303;保温箱铰链板304;弹性降落
架305;保温箱306;保温箱升降动力轴307;保温箱扣合蜗杆轴308;保温箱扣合蜗轮309;保温箱合页轴310。
具体实施方式
23.具体实施方式一:
24.下面结合图1、2、3、4、5、6、7、8为解决上述技术问题,一种无人机,包括机体主体1、防漏溢装置2、自动卸放装置3,通过机体主体1安装其他的装置并提供爬升动力及控制,防漏溢装置2确保在无人机爬升时外卖无撒漏溢出,自动卸放装置3实现外卖定点定位投放及保温,实现对节约外卖配送的时间、人力成本的功能,其特征在于:防漏溢装置2安装固定在机体主体1上,自动卸放装置3安装固定在防漏溢装置2上。
25.具体实施方式二:
26.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式一作进一步说明,所述的机体主体1包括机体上罩101、机体下罩102、爬升扇叶103、联动控制轴104、扇叶轴105、扇叶马达106、视觉控制模块107、连接座108,扇叶马达106通过同步齿形带将动力实时传递至扇叶轴105上,通过视觉控制模块107实现四个扇叶轴105的不同转速控制以实现机体在空中的爬升、转向等动作,视觉控制模块107内置摄像头,提供动力、控制以及定位等功能,机体下罩102通过螺钉安装固定在机体上罩101上,爬升扇叶103安装固定在扇叶轴105上,联动控制轴104转动安装在视觉控制模块107上,扇叶轴105通过轴承转动安装在机体上罩101上,扇叶轴105通过轴承转动安装在机体下罩102上,扇叶马达106安装固定在机体下罩102上,视觉控制模块107安装固定在机体上罩101上,连接座108安装固定在机体下罩102上。
27.具体实施方式三:
28.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式一作进一步说明,所述的防漏溢装置2包括装置连接架201、开合动力输入轴202、开合动力中转轴203、开合主动锥齿204、开合拨叉轴205、开合被动锥齿206、丝杠锁紧块207、丝杠安装块208、挂袋丝杠螺母209、挂袋丝杠210、挂袋块211、滑台212、开合拨叉213、锁紧螺母214、开合上拨盘215、开合叶216、开合固定盘217,动力通过视觉控制模块107经由联动控制轴104和同步带轮传递至开合动力输入轴202上,开合动力输入轴202再经由同步带轮将动力传递至开合动力中转轴203上,开合动力输入轴202和挂袋丝杠螺母209连接,当开合动力输入轴202转动时,挂袋丝杠螺母209随之转动带动挂袋丝杠210回退,此时挂袋块211跟随挂袋丝杠210滑动至靠近挂袋丝杠螺母209位置,且挂袋丝杠210从丝杠锁紧块207上脱开,留出挂外卖包装袋的缝隙,将外卖挂至挂袋块211上,同时由于开合主动锥齿204和开合被动锥齿206啮合,带动开合拨叉轴205转动,开合拨叉213带动开合上拨盘215转动,此时类似相机快门机构铰链安装在开合固定盘217和开合上拨盘215上的开合叶216打开,外卖袋上口进入四片开合叶216中间,随后整个机构复位,挂袋丝杠210重新扣合在丝杠锁紧块207上,同时四片开合叶216随着开合上拨盘215的拨动相互扣合,将外卖袋上开口扣紧,实现防止外卖袋在机体爬升过程中倾撒或漏溢的功能,装置连接架201安装固定在连接座108上,开合动力输入轴202通过轴承转动安装在连接座108上,开合动力中转轴203通过轴承转动安装在连接座108上,开合主动锥齿204安装固定在开合动力中转轴203,开合拨叉轴205通过轴承
转动安装在装置连接架201上,开合被动锥齿206安装固定在开合拨叉轴205上,开合被动锥齿206和开合主动锥齿204啮合,丝杠锁紧块207安装固定在连接座108上,丝杠安装块208安装固定在连接座108上,挂袋丝杠螺母209通过轴承转动安装在丝杠安装块208上,挂袋丝杠210螺纹安装在挂袋丝杠螺母209,挂袋块211螺纹安装在挂袋丝杠210上,滑台212安装固定在丝杠安装块208上,滑台212滑动端安装固定在挂袋块211上,开合拨叉213安装固定在开合拨叉轴205上,锁紧螺母214螺纹安装在开合拨叉213上,开合上拨盘215安装固定在开合拨叉213上,开合叶216铰链安装在开合上拨盘215上,开合固定盘217滑动安装在开合叶216上。
29.具体实施方式四:
30.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式一作进一步说明,所述的自动卸放装置3包括保温箱控制模块301、保温箱投放丝杠302、保温箱丝杠螺母303、保温箱铰链板304、弹性降落架305、保温箱306、保温箱升降动力轴307、保温箱扣合蜗杆轴308、保温箱扣合蜗轮309、保温箱合页轴310,在挂袋完成前,保温箱控制模块301通过带轮与保温箱升降动力轴307将动力传递至保温箱丝杠螺母303上,保温箱丝杠随之下降,带动保温箱铰链板304下降,此时再进行挂袋操作,挂袋完成后,保温箱铰链板304随着保温箱丝杠螺母303的反转而上升,到达极限位置后,保温箱扣合蜗杆轴308与保温箱扣合蜗轮309啮合,带动因下降而不再处于水平状态的保温箱306复位至水平状态,同时对外卖袋进行包裹,实现保温的功效,当到达配送点时,保温箱扣合蜗杆轴308与保温箱扣合蜗轮309啮合反转,带动保温箱转至垂直状态,随后弹性降落架305与配送点箱体接触降落,防漏溢装置2开始运作,使得外卖袋上口打开且外卖袋脱离挂袋块211,由视觉控制模块107监控外卖袋使其从机体上脱开,随后无人机机体起飞爬升,完成单次外卖投放配送以节约人力与时间成本,保温箱控制模块301安装固定在装置连接架201上,保温箱投放丝杠302通过保温箱丝杠螺母303螺纹安装在装置连接架201上,保温箱丝杠螺母303安装固定在装置连接架201上,保温箱铰链板304安装固定在保温箱投放丝杠302上,弹性降落架305安装固定在装置连接架201上,保温箱306铰链安装在保温箱铰链板304上,保温箱升降动力轴307转动安装在保温箱控制模块301上,保温箱扣合蜗杆轴308转动安装在保温箱控制模块301上,保温箱扣合蜗轮309和保温箱扣合蜗杆轴308啮合,保温箱扣合蜗轮309安装固定在保温箱合页轴310上,保温箱合页轴310转动安装在保温箱铰链板304上,保温箱合页轴310安装固定在保温箱306上。
31.具体实施方式五:
32.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式二作进一步说明,所述机体主体1中,爬升扇叶103、扇叶轴105、扇叶马达106均有四个。
33.具体实施方式六:
34.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式三作进一步说明,所述防漏溢装置2中,装置连接架201有两个,开合叶216有四个。
35.具体实施方式七:
36.下面结合图1、2、3、4、5、6、7、8说明本实施方式,本实施方式对实施方式四作进一步说明,所述自动卸放装置3中,保温箱投放丝杠302、保温箱丝杠螺母303、弹性降落架305均有两个。
37.当然,上述说明并非对本发明的限制,本发明也不仅限于述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1