一种太阳能无人机电源管理方法
1.本发明涉及无人机供电管理技术领域,具体涉及一种太阳能无人机电源管理方法。
背景技术:
2.近些年来,太阳能无人机得到了迅猛发展,太阳能电池的效率不断提升,但由于太阳能电池的特性所致,在光照弱或者设备用电电流大时,电池板的输出电压值会迅速降低,导致飞机上的电子设备电压过低而无法正常工作,可能会出现无人机供电不足失去控制的情况,影响了无人机的正常飞行。
3.目前的解决方案是在太阳能飞机上布置二次电池,利用二次电池的供电来弥补太阳能电池发电能力的不足,但二次电池本身重量较重,使得太阳能飞机重量和翼展不断增大,不利于太阳能飞机的小型化,且其也只能是在电压不足的时候进行补充并不能在过低时进行调节。
技术实现要素:
4.本发明提供一种太阳能无人机电源管理方法,利用本发明的方案,可以使得太阳能无人机在太阳能电池供电不稳定时,保持对无人机控制,同时,太阳能无人机的重量和翼展大幅缩小,有利于太阳能无人机的小型化。
5.为达到上述目的,本发明的技术方案是:一种太阳能无人机电源管理方法,包括无人机和设置在无人机上的电源管理系统,所述电源管理系统包括设置在无人机上的太阳能电池板、用于驱动无人机飞行的电机、用于控制无人机的控制系统和电源控制系统,太阳能电池板与电源控制系统电性连接,电源控制系统与电机电性联接,控制系统分别与太阳能电池板和电机电性连接;所述电源管理方法包括如下步骤:(1)获取当前时刻光照强度下太阳能电池板的电池电压;(2)获取电池电压与电压阈值之间的电压差值;(3)判断电池电压与电压阈值之间的电压差值,若该电压差值大于或等于0,则进入步骤(4);若该电压差值小于0,则通过商值计算子模块获取电压差值与预设的调节阈值的商值,随后通过倍数计算子模块对商值的绝对值进行向上取整,得到调节倍数;根据调节倍数与预设的调节基数的相乘,得出所需调节的电流强度值;进入步骤(5);(4)调节无人机电机的电流强度为无人机电机的额定电流强度值,进入步骤(1);(5)根据所需调节电流强度值对输出到电机的电流强度值进行调节,并输出至无人机的电机,进入步骤(1);上述方法,包括太阳能电池供电稳定和太阳能电池电池板供电不稳定两种情况:当太阳能电池供电稳定时,即判断电池电压与预设的电压阈值之间的电压差值大于或等于0;当该电压差值大于0时,调节无人机电机的电流强度为无人机电机的额定电流
强度值,使得电机在额定电流下正常运作,继续获取太阳能电池的电池电压;当该电压差值等于0时,继续获取太阳电池电压;当太阳能电池供电不稳定时,电源管理系统可根据当前时刻的太阳能电池板的电源电压对电机的电流进行调整,即判断电池电压与预设的电压阈值之间的电压差值小于0;此时为了避免由于太阳能电池过低导致控制系统无法正常运作,在保证控制系统正常工作的前提下,降低电机的电流,进而电流调节模块计算电机所需要降低的电流强度值,并根据计算结果,降低输出到电机的电流,这样,即使电机无法正常提供动力,但保证无人机仍处于可控状态,使得电机能够在太阳能电池供电不稳定的情况下且保证无人机可控的前提下最大功率工作,进而使得无人机在电机动力不足的情况下,仍能控制无人机飞出光照不足区域或将无人机进行降落,从而避免太阳能无人机动力不足导致坠毁,同时保证无人机的轻量化。
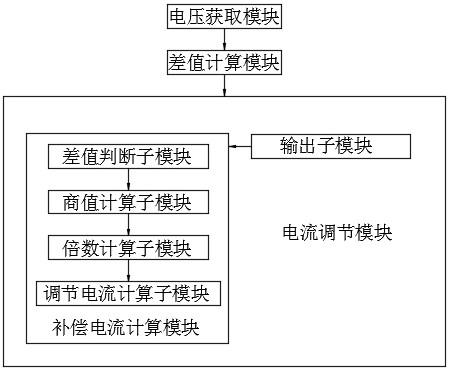
6.进一步地,所述电源控制系统包括:电压获取模块,与无人机上的太阳能电池板电性连接,用于获取无人机上太阳能电池板实时的电池电压;差值计算模块,与电压获取模块电性连接,用于获取电池电压与电压阈值之间的电压差值;电流调节模块,与差值计算模块电性连接,用于调整无人机电机的电流强度值;所述电流调节模块包括:补偿电流计算模块和输出子模块,补偿电流计算模块与差值计算模块电性连接;补偿电流计算模块与输出子模块连接。
7.进一步地,所述补偿电流计算模块包括:差值判断子模块,与差值计算模块电性连接,用于判断电压差值是否大于或等于0;商值计算子模块,与差值计算模块、差值判断子模块电性连接,用于获取电压差值与调节阈值的商值;倍数计算子模块,与商值计算子模块电性连接,用于对商值的绝对值进行向上取整,得到调节倍数;输出电流计算子模块,与倍数计算子模块电性连接,用于获取无人机电机的调节电流强度值;输出子模块,与差值判断子模块、输出电流计算子模块电性连接,用于输出无人机电机的实时电流强度值。
8.进一步地,所述步骤(5)还包括将无人机电机的额定电流与所需调节的电流强度值之间的差值作为无人机电机当前时刻的电流强度值;以上设置,当光照强度不足,太阳能电池板的供电不稳定时,电源控制系统可根据当前时刻的太阳能电池板的电源电压对电机的电流进行调整,不断根据当前时刻的太阳能电池板的电源电压,对电机当前时刻的电流强度值进行调整,使得无人机在保证控制系统正常工作的情况下电机最大功率工作,进而降低无人机坠毁的可能性。
9.进一步地,所述电源管理系统具体包括电感r1、r2和r3,多个串联设置的太阳能电池板r4、r5、r5、r7、r8、r9、r10、r11,单片机u1和用于控制无人机电机的电流强度值的输出电路板u2;单片机u1的pin1接口与输出电路板u2的pin2结构相连,单片机u1的pin5接口与
输出电路板u2的pin1接口之前通过电感r1相连,单片机u1的pin2接口通过电感r3与太阳能电池板r4相连,单片机u1的pin2接口通过电感r2与太阳能电池板r11相连;单片机u1的pin8接口与太阳能电池板r4相连,单片机u1的pin8接口与输出电路板u2的pin3接口相连;输出电路板u2的pin2接口与太阳能电池板r11相连。
附图说明
10.图1为为发明实施例中电源控制系统的模块示意图。
11.图2为本发明中太阳能无人机电源管理系统的工作方法流程图。
12.图3为本发明实施例中的电路结构示意图。
具体实施方式
13.下面结合附图和具体实施方式对本发明做进一步详细说明。
14.如图1-图3所示,一种太阳能无人机电源管理方法,包括无人机和设置在无人机上的电源管理系统,所述电源管理系统包括设置在无人机上的太阳能电池板、用于驱动无人机飞行的电机、用于控制无人机的控制系统和电源控制系统,太阳能电池板与电源控制系统电性连接,电源控制系统与电机电性联接,控制系统分别与太阳能电池板和电机电性连接。
15.所述电源管理方法包括如下步骤:(1)获取当前时刻光照强度下太阳能电池板的电池电压。
16.(2)获取电池电压与电压阈值之间的电压差值。
17.(3)判断电池电压与电压阈值之间的电压差值,若该电压差值大于或等于0,则进入步骤(4);若该电压差值小于0,则通过商值计算子模块获取电压差值与预设的调节阈值的商值,随后通过倍数计算子模块对商值的绝对值进行向上取整,得到调节倍数;根据调节倍数与预设的调节基数的相乘,得出所需调节的电流强度值;进入步骤(5)。
18.(4)调节无人机电机的电流强度为无人机电机的额定电流强度值,进入步骤(1)。
19.(5)根据所需调节电流强度值对输出到电机的电流强度值进行调节,并输出至无人机的电机,进入步骤(1)。
20.上述方法,包括太阳能电池供电稳定和太阳能电池电池板供电不稳定两种情况:当太阳能电池供电稳定时,即判断电池电压与预设的电压阈值之间的电压差值大于或等于0;当该电压差值大于0时,调节无人机电机的电流强度为无人机电机的额定电流强度值,使得电机在额定电流下正常运作,继续获取太阳能电池的电池电压;当该电压差值等于0时,继续获取太阳电池电压。
21.当太阳能电池供电不稳定时,电源管理系统可根据当前时刻的太阳能电池板的电源电压对电机的电流进行调整,即判断电池电压与预设的电压阈值之间的电压差值小于0;此时为了避免由于太阳能电池过低导致控制系统无法正常运作,在保证控制系统正常工作的前提下,降低电机的电流,进而电流调节模块计算电机所需要降低的电流强度值,并根据计算结果,降低输出到电机的电流,这样,即使电机无法正常提供动力,但保证无人机仍处于可控状态,使得电机能够在太阳能电池供电不稳定的情况下且保证无人机可控的前提下最大功率工作,进而使得无人机在电机动力不足的情况下,仍能控制无人机飞出光照不足
区域或将无人机进行降落,从而避免太阳能无人机动力不足导致坠毁,同时保证无人机的轻量化。
22.所述电源控制系统包括:电压获取模块,与无人机上的太阳能电池板电性连接,用于获取无人机上太阳能电池板实时的电池电压。
23.差值计算模块,与电压获取模块电性连接,用于获取电池电压与电压阈值之间的电压差值。
24.电流调节模块,与差值计算模块电性连接,用于调整无人机电机的电流强度值。
25.所述电流调节模块包括:补偿电流计算模块和输出子模块,补偿电流计算模块与差值计算模块电性连接;补偿电流计算模块与输出子模块连接。
26.所述补偿电流计算模块包括:差值判断子模块,与差值计算模块电性连接,用于判断电压差值是否大于或等于0。
27.商值计算子模块,与差值计算模块、差值判断子模块电性连接,用于获取电压差值与调节阈值的商值。
28.倍数计算子模块,与商值计算子模块电性连接,用于对商值的绝对值进行向上取整,得到调节倍数。
29.输出电流计算子模块,与倍数计算子模块电性连接,用于获取无人机电机的调节电流强度值。
30.输出子模块,与差值判断子模块、输出电流计算子模块电性连接,用于输出无人机电机的实时电流强度值。
31.如图3所示,为本实施例中太阳能无人机电源管理系统实施过程中的电路结构图,其中,r1、r2、r3为电感,r4、r5、r5、r7、r8、r9、r10、r11为太阳能电池板,u1为单片机,u2为输出电路板,其中,太阳能无人机电源管理系统搭载在单片机u1上,u2为输出电路板与无人机电机相连进而控制无人机电机的电流强度值;太阳能电池板r4、r5、r5、r7、r8、r9、r10、r11依次串联,单片机u1的pin1接口与输出电路板u2的pin2结构相连,单片机u1的pin5接口与输出电路板u2的pin1接口之前通过电感r1相连,单片机u1的pin2接口通过电感r3与太阳能电池板r4相连,单片机u1的pin2接口通过电感r2与太阳能电池板r11相连;单片机u1的pin8接口与太阳能电池板r4相连,单片机u1的pin8接口与输出电路板u2的pin3接口相连;输出电路板u2的pin2接口与太阳能电池板r11相连;单片机u1的型号为at89c51,输出电路板的型号u2的型号为pcb-7。
32.以上设置,太阳能电池板r4、r5、r5、r7、r8、r9、r10和r11依次串联并输出电流,电流分别进入电感r3、单片机u1的pin8口和输出电路板的pin3口,电流经过电感r3后,分别进入单片机u1的pin2口和经过电感r2流向太阳能电池板,单片机的pin1口输出信号进入输出电路板u2的 pin1口。
33.单片机根据当前时刻太阳能电池板输出的电池电压,单片机根据当前时刻太阳能电池板输出的电池电压,判断当前时刻电池电压与电压阈值之间的电压差值,随后单片机u1根据电压差值从pin5口输出电信号,经过电感r1进入输出电路板的pin1口,随后输出电路板u2的pin3口根据从单片机u1获取的信号来输出调节后的电流,这样,能够保证太阳能
电池板提供足够的电流给单片机维持运作,进而单片机能够根据太阳能电池板当前的电压对电流进行调节,使得无人机始终处于可控的状态。
34.太阳能电池板r4、r5、r5、r7、r8、r9、r10、r11均为0.5v的太阳能电池板,因此预先设定电压阈值为4v、预先设定调节阈值为0.2v,预先设定调节基数为50ma。
35.若在某一时刻太阳光照强度足够,获取的电池电压为4.0v,则调节无人机电机的电流强度值为无人机电机的额定电流强度值。
36.若某一时刻太阳光照强度较弱,获取的电池电压为3.7v;则电压差值为3.7-4=-0.3v,进一步得到调节倍数为(0.3/0.2)的向上取整,即调节倍数为2,计算得到调节电流强度值为50
×
2=100ma,则将无人机电机的额定电流强度值减去100ma得到的差值作为无人机电机当前时刻的电流强度值。
37.若某一时刻太阳光照强度进一步减弱,获取的电池电压为3.1v;则电压差值为3.1-4=-0.9v,进一步得到调节倍数为(0.9/0.2)的向上取整,即调节倍数为5,计算得到调节电流强度值为50
×
5=250ma,则将无人机电机的额定电流强度值减去250ma得到的差值作为无人机电机当前时刻的电流强度值。
38.若某时刻太阳光照强度增强,但太阳光照强仍不足够,获取的电池电压为3.8v;则电压差值为3.8-4=-0.2v,进一步得到调节倍数为(0.2/0.2)的向上取整,即调节倍数为1,计算得到调节电流强度值为50
×
1=50ma,则将无人机电机的额定电流强度值减去50ma得到的差值作为无人机电机当前时刻的电流强度值;这样,当太阳光照强度不够的情况下,太阳光照可能会出现不断变化的情况,通过上述方法,可根据当前太阳能电池板的电池电压不断优化无人机电机的功率,使得无人机在太阳能电池板供电不足的情况下时刻处于最大工作功率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1