一种涵道式动力装置与碟形体铰接的二体全向飞行器
1.本发明属于无人机技术领域,特别是涉及一种涵道式动力装置与碟形体铰接的二体全向飞行器。
背景技术:
2.近些年,无人机技术得到了快速发展,通过在无人机上搭载各种功能载荷,使无人机在诸多领域内得到了应用,并替代有人驾驶飞行器完成各种特定任务。
3.无人机根据结构类型的不同,主要分为固定翼无人机和旋翼无人机。对于固定翼无人机来说,虽然其具有航速快、航程长、机动性强的优点,但是还存在受起降场地限制的缺点,起飞时,或需要跑道,或需要弹射轨道,降落时,或采用滑降,或采用伞降,导致固定翼无人机的起降安全性和灵活性都比较差。对于旋翼无人机来说,虽然具有可垂直起降、可空中悬停、对起降场地要求低的优点,但是却存在飞行速度慢、续航时间短、机动性差的缺点。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种涵道式动力装置与碟形体铰接的二体全向飞行器,既具有航速快、航程长、机动性强的优点,又具有可垂直起降、可空中悬停、对起降场地要求低的优点,不但满足低空低速飞行需要,而且满足高速高机动飞行需要,同时具备全向飞行的能力。
5.为了实现上述目的,本发明采用如下技术方案:一种涵道式动力装置与碟形体铰接的二体全向飞行器,包括碟形体机身、涵道式动力装置及动力铰链气道;所述碟形体机身的上表面为弧面,碟形体机身的下表面为弧面或平面,且当碟形体机身的下表面为弧面时,碟形体机身上表面的弧度大于碟形体机身下表面的弧度;在所述碟形体机身的中心开设有竖直向的进气通孔;所述动力铰链气道位于碟形体机身的下方,动力铰链气道的进气端与进气通孔的下孔口相连通;所述涵道式动力装置与动力铰链气道的出气端相连。
6.在所述进气通孔正上方设置有功能载荷仓,功能载荷仓采用圆盘形结构,功能载荷仓通过支撑杆固定架设在碟形体机身上表面,在功能载荷仓与碟形体机身之间留有进气间隙。
7.在所述功能载荷仓内安装有陀螺仪、加速度计、磁力计及卫星导航仪。
8.在所述功能载荷仓正上方设置有风标,在风标内安装有空速管、攻角传感器及侧滑角传感器。
9.所述动力铰链气道的弯转角度范围为90
°
~180
°
。
10.通过调整所述动力铰链气道的弯转角度,改变涵道式动力装置与碟形体机身之间的矢量夹角,用以产生动量矩守恒力矩。
11.在所述涵道式动力装置包括外筒体、喷气发动机及气动舵面;所述外筒体采用圆柱筒形结构,外筒体的进气端与动力铰链气道的出气端相连通;所述喷气发动机同轴固定在外筒体内部,且喷气发动机的进气口与动力铰链气道相邻;所述气动舵面设置在喷气发
动机出气口侧的外筒体筒口处内部;在所述喷气发动机的进气口处安装有空气过滤器。
12.所述气动舵面数量为三个或四个,多个气动舵面在外筒体内部沿周向且呈辐射状均匀分布。
13.所述气动舵面的偏转角度范围为-45
°
~45
°
。
14.通过调整所述气动舵面的偏转角度,改变喷气发动机的推力矢量,用以产生气动力矩。
15.本发明的有益效果:
16.本发明的涵道式动力装置与碟形体铰接的二体全向飞行器,既具有航速快、航程长、机动性强的优点,又具有可垂直起降、可空中悬停、对起降场地要求低的优点,不但满足低空低速飞行需要,而且满足高速高机动飞行需要,同时具备全向飞行的能力。
附图说明
17.图1为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器(动力铰链气道的弯转角度为180
°
)的主视图;
18.图2为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器的俯视图;
19.图3为本发明的涵道式动力装置的局部视图;
20.图4为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器(动力铰链气道的弯转角度为180
°
,同时附有笛卡尔坐标系)的主视图;
21.图5为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器(动力铰链气道的弯转角度为180
°
,同时附有低速飞行模式下的受力分析)的主视图;
22.图6为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器(动力铰链气道的弯转角度为80
°
,同时附有高速飞行模式下的受力分析)的主视图;
23.图7为本发明的一种涵道式动力装置与碟形体铰接的二体全向飞行器(动力铰链气道的弯转角度为80
°
,同时附有高速飞行模式下的受力分析)的俯视图;
24.图中,1—碟形体机身,2—涵道式动力装置,3—动力铰链气道,4—进气通孔,5—功能载荷仓,6—支撑杆,7—风标,8—气动舵面,g
质
—飞行器质心,f
推
—矢量推力,f
升
—气动升力,f
阻
—空气阻力,m
俯
—俯仰力矩,m
偏
—偏航力矩,m
滚
—滚转力矩。
具体实施方式
25.下面结合附图和具体实施例对本发明做进一步的详细说明。
26.如图1~7所示,一种涵道式动力装置与碟形体铰接的二体全向飞行器,包括碟形体机身1、涵道式动力装置2及动力铰链气道3;所述碟形体机身1的上表面为弧面,碟形体机身1的下表面为弧面或平面,且当碟形体机身1的下表面为弧面时,碟形体机身1上表面的弧度大于碟形体机身1下表面的弧度;在所述碟形体机身1的中心开设有竖直向的进气通孔4;所述动力铰链气道3位于碟形体机身1的下方,动力铰链气道3的进气端与进气通孔4的下孔口相连通;所述涵道式动力装置2与动力铰链气道3的出气端相连。
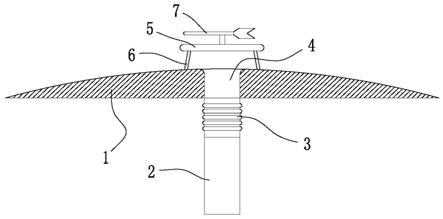
27.在所述进气通孔4正上方设置有功能载荷仓5,功能载荷仓5采用圆盘形结构,功能载荷仓5通过支撑杆6固定架设在碟形体机身1上表面,在功能载荷仓5与碟形体机身1之间留有进气间隙。
28.在所述功能载荷仓5内安装有陀螺仪、加速度计、磁力计及卫星导航仪等。
29.在所述功能载荷仓5正上方设置有风标7,在风标7内安装有空速管、攻角传感器及侧滑角传感器。
30.所述动力铰链气道3的弯转角度范围为90
°
~180
°
。
31.通过调整所述动力铰链气道3的弯转角度,改变涵道式动力装置2与碟形体机身1之间的矢量夹角,用以产生动量矩守恒力矩。
32.在所述涵道式动力装置2包括外筒体、喷气发动机及气动舵面8;所述外筒体采用圆柱筒形结构,外筒体的进气端与动力铰链气道3的出气端相连通;所述喷气发动机同轴固定在外筒体内部,且喷气发动机的进气口与动力铰链气道3相邻;所述气动舵面8设置在喷气发动机出气口侧的外筒体筒口处内部;在所述喷气发动机的进气口处安装有空气过滤器。
33.所述气动舵面8数量为三个或四个,多个气动舵面7在外筒体内部沿周向且呈辐射状均匀分布。
34.所述气动舵面8的偏转角度范围为-45
°
~45
°
。
35.通过调整所述气动舵面8的偏转角度,改变喷气发动机的推力矢量,用以产生气动力矩。
36.在碟形体机身1的边缘定义一个标记点a,将碟形体机身1的质心点定义为o1点,将o1点指向标记点a的连线定位为x1轴,将飞行器在水平方向上的速度矢量定位为xv,将x1轴与速度矢量xv之间的夹角定义为侧滑角β,将x1轴与正北方向之间的夹角定义为机体方位角ψ,方向向右为正,将速度方位角定义为ψv,则速度方位角ψv=机体方位角ψ+侧滑角β,且侧滑角β的范围为-180
°
~180
°
,因此飞行器具有全向飞行的能力。
37.在飞行器处于垂直起降阶段时,速度较低,空气动力影响不大,飞行器竖直方向的力由涵道式动力装置2内的喷气发动机的推力提供,便可满足可控起降。
38.当飞行器进入低速飞行模式后,可通过调整气动舵面8的偏转角度来改变喷气发动机的推力矢量,进而用以产生气动力矩;同时通过调整动力铰链气道3的弯转角度来改变涵道式动力装置2与碟形体机身1之间的矢量夹角,用以产生动量矩守恒力矩;当飞行器进入高速飞行模式后,就可以通过气动力矩与动量矩守恒力矩的配合来改变飞行器的俯仰力矩、滚转力矩和偏航力矩,最终实现飞行器的高机动性能下的姿态调整。
39.下面结合附图对飞行器的受力进行分析。
40.首先,建立飞行器各个部分的笛卡尔坐标系,依次为惯性坐标系、碟形体机身坐标系、速度坐标系及涵道式动力装置坐标系。
41.在惯性坐标系中,og点为地平面上的任意一点,且ogxg坐标指向正北方向,ogzg坐标垂直于地平面,ogyg符合右手定则。
42.在碟形体机身坐标系中,o1点为碟形体机身的质心点,o1x1坐标指向标记点a,o1z1坐标在纵向平面内垂直于o1x1坐标,o1y1符合右手定则。
43.在速度坐标系中,ov点为飞行器的质心点,ovxv坐标指向飞行器质心运动方向,o
vzv
坐标在x
vovzv
平面内垂直于ovxv坐标,o
vyv
符合右手定则。
44.在涵道式动力装置坐标系内,o2点为涵道式动力装置的质心点,o2x2坐标指向喷气发动机的法线轴方向,o2z2坐标在x2o2z2平面内垂直于o2x2坐标,o2y2符合右手定则。
45.惯性坐标系与碟形体机身坐标系的关系如下:
[0046][0047]
式中,ψ为机体方位角,θ为俯仰角,γ为滚转角。
[0048]
碟形体机身坐标系与涵道式动力装置坐标系的关系如下:
[0049][0050]
式中,λ1为绕o1z1坐标轴旋转的关节角,λ2为绕o1x1坐标轴旋转的关节角。
[0051]
速度坐标系与碟形体机身坐标系的关系如下:
[0052][0053]
式中,α为攻角,β为侧滑角。
[0054]
当飞行器在低速飞行模式下,由于飞行速度很小,因此气动力可以忽略不计,通过气动舵面8控制气动力矩,通过动力铰链气道3控制动量矩守恒力矩,通过气动力矩与动量矩守恒力矩配合调整飞行器姿态,在低速飞行过程中,碟形体机身1的升力由喷气发动机的矢量推力的垂直分量提供。具体的,飞行器在低速飞行的受力为:垂直方向的力为重力和矢量推力的垂直分量,水平方向的力为空气阻力和矢量推力的水平分量。此外,通过气动舵面8的差动来产生偏航力矩,通过调整气动舵面8的偏转角度来控制气动力矩,当气动力矩与动量矩守恒力矩配合后,可产生俯仰力矩和滚转力矩。
[0055]
当飞行器在高速飞行模式下,飞行器同时受到重力、气动力和矢量推力的作用,通过动力铰链气道3控制碟形体机身1与喷气发动机的夹角,通过喷气发动机的矢量推力为飞行器提供飞行推力,并且飞行器的升力主要由碟形体机身1在高速飞行时产生的气动升力提供,喷气发动机的矢量推力的垂直分量仅提供少量升力。当喷气发动机的矢量推力不过飞行器重心时,便可以使飞行器产生抬头力矩,为了平衡不对称外力和外力距对飞行器的影响,飞行器可以通过控制气动舵面8来改变气动力矩,当气动力矩与动量矩守恒力矩配合后,可改变飞行器的飞行姿态,从而保持飞行器在高速飞行时的平稳性。具体的,飞行器在高速飞行的受力为:垂直方向的力为重力和升力的垂直分量,水平方向的力为空气阻力和矢量推力在运动方向的分量,运动法向方向的力为升力、侧向空气阻力和矢量推力的水平分量。此外,通过气动舵面8的差动来产生滚转力矩,通过调整气动舵面8的偏转角度来控制气动力矩,当气动力矩与动量矩守恒力矩配合后,可产生偏航力矩和俯仰力矩。
[0056]
实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等
效实施或变更,均包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1