一种土地测量无人机航摄视频测量装置的制作方法
1.本发明涉及无人机航摄测量技术领域,更具体地说,涉及一种土地测量无人机航摄视频测量装置。
背景技术:
2.无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机与航空摄影测量相结合使得“无人机数字低空遥感”成为航空遥感领域的一个崭新发展方向,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景。
3.然而,现有技术中通过无人机进行航摄视频测量时存在一定的技术局限,一方面无人机上用于视频采集的摄像头调节需要多个马达或电机来驱动,这样不但增加了机体的负重,能耗也相对较大,另一方面无人机一般都是采用蓄电池进行供电,但是一旦无人机在空中出现断电现象后,及时地面遥控设备受到缺电信号,无人机从高空下落后,也很容易产生碰撞损坏。
技术实现要素:
4.1.要解决的技术问题针对现有技术中存在的问题,本发明的目的在于提供一种土地测量无人机航摄视频测量装置,太阳跟踪器通过高处对太阳辐射光线进行跟踪,并将光照强面的方位信号传递给单片机,单片机对转动件控制,启动第一电机,利用安装室内的第一电机带动第二齿轮转动,第二齿轮联动第一齿轮使得轴管带动光伏板在机体上端进行转动调节,以便于光伏板对太阳能进行更快捷的接收,并利用光伏逆变器进行转换电能并对蓄电池进行充电,为无人机在高空用电进行持久的续航,同时也有效的避免高空出现无人机断电易损的问题。
5.2.技术方案为解决上述问题,本发明采用如下的技术方案。
6.一种土地测量无人机航摄视频测量装置,包括机体,所述机体的内侧设有安装室,所述安装室的内部设有转动件,所述转动件贯穿机体顶部固定连接有光伏板,所述机体的上端固定连接有太阳跟踪器,所述安装室的内部分别固定安装有蓄电池和光伏逆变器以及单片机,所述机体的左右两侧均固定连接有安装架,所述安装架的内侧设有调节件,所述调节件的下端设有摄像头,所述机体的内部设有内室,所述调节件的外部设有联动件,所述机体的下端左右两侧均设有稳定件。
7.进一步的,所述转动件包括双头筒,所述双头筒转动连接在机体的上端,所述双头
筒的下头设在安装室的内部,所述双头筒的内部固定安装有轴管,所述轴管的上端贯穿双头筒和光伏板的下端固定连接,所述轴管的下端贯穿双头筒固定连接有第一齿轮,所述安装室的内部固定安装有第一电机,所述第一电机的输出端固定连接有第二齿轮,所述第一齿轮和第二齿轮为啮合连接。
8.进一步的,所述光伏板的下端左右两侧均固定连接有滑块,所述机体的上端固定安装有滑轨,所述滑块和滑轨为滑动连接。
9.进一步的,所述调节件包括轴杆,所述轴杆转动连接在安装架的内侧,所述摄像头固定安装在轴杆的外部,所述安装架的对侧固定连接有位板,所述位板的下端固定安装有第一轨道,所述第一轨道的内部滑动连接有第一齿条,所述轴杆的外部固定安装有第三齿轮,所述第一齿条和第三齿轮为啮合连接,所述联动件设在第一齿条的一端。
10.进一步的,所述联动件包括第二电机,所述第二电机固定安装在内室的内侧顶部,所述内室的内部固定连接有第二轨道,所述第二轨道的内部滑动连接有第二齿条,所述内室的内部转动连接有第四齿轮,所述第四齿轮和第二齿条啮合连接,所述第二电机的输出端和第四齿轮的上端固定连接,所述内室的内部滑动连接有推臂,所述推臂的一端和第二齿条的一端固定连接,所述推臂的另一端贯穿内室和第一齿条的一端固定连接。
11.进一步的,所述内室的内部固定安装有滑套,所述推臂的一端滑动连接在滑套的内部。
12.进一步的,所述稳定件包括凹板和凸板,所述凹板固定连接在机体的下端左右两侧,所述凸板滑动连接在凹板的下端,所述凹板的下端设有筒槽,所述凸板的上端固定连接有筒柱,所述筒柱的上端伸入筒槽的内侧固定连接有滑块,所述滑块滑动连接在筒槽的内侧,所述筒槽和滑块的对侧设有弹簧。
13.进一步的,所述凸板的下端粘接连接有橡胶垫,所述橡胶垫的下端设有若干凸点。
14.3.有益效果相比于现有技术,本发明的优点在于:(1)太阳跟踪器通过高处对太阳辐射光线进行跟踪,并将光照强面的方位信号传递给单片机,单片机对转动件控制,启动第一电机,利用安装室内的第一电机带动第二齿轮转动,第二齿轮联动第一齿轮使得轴管带动光伏板在机体上端进行转动调节,以便于光伏板对太阳能进行更快捷的接收,并利用光伏逆变器进行转换电能并对蓄电池进行充电,为无人机在高空用电进行持久的续航,同时也有效的避免高空出现无人机断电易损的问题;(2)通过设置调节件和联动件,利用第二电机转动驱动内室中的第四齿轮转动,第四齿轮联动内室第二轨道上的第二齿条同时向内室内部或外部进行滑动,而第二齿条的一端通过和内室内部的推臂连接,使得推臂可以对第一齿条进行推动,而第一齿条被推动后在位板上的第一轨道上滑动,同时第一齿条联动轴杆上的第三齿轮转动,轴杆随着带着摄像头发生角度转动进行调节,同步调节的同时采用单个电机驱动极大的降低了机体的负重,也减少了能耗;(3)利用凸板在凹板下端滑动,确保凸板和凹板呈垂直向运动,同时凸板着地后凸板连接的筒柱通过筒柱上端的滑块在筒槽内滑动并利用滑块和通槽之间设置的弹簧,可以起到减震的效果,此外在凸板下端增加了带有凸点橡胶垫,使得凸板下端富有弹力,从而进一步提升减震效果。
附图说明
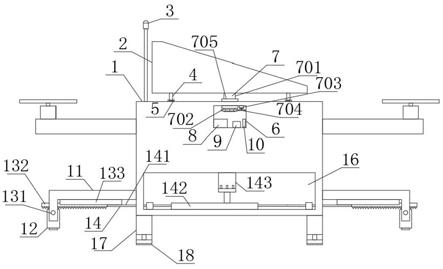
15.图1为本发明的结构示意图;图2为本发明的联动件俯视图;图3为本发明的安装架左视图;图4为本发明的稳定件侧剖图;图5为本发明的电路连接模块示意图。
16.图中标号说明:1、机体;2、光伏板;3、太阳跟踪器;4、滑块;5、滑轨;6、安装室;7、转动件;701、轴管;702、第一齿轮;703、第一电机;704、第二齿轮;705、双头筒;8、蓄电池;9、光伏逆变器;10、单片机;11、安装架;12、摄像头;13、调节件;131、轴杆;132、第一齿条;133、第一轨道;134、第三齿轮;135、位板;14、联动件;141、推臂;142、第二轨道;143、第二电机;144、第四齿轮;145、第二齿条;15、滑套;16、内室;17、稳定件;171、凹板;172、凸板;173、筒槽;174、弹簧;175、滑块;176、筒柱;18、橡胶垫。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
20.实施例1参考图1-3,本实施例所述的一种土地测量无人机航摄视频测量装置,包括机体1,机体1的内侧设有安装室6,安装室6的内部设有转动件7,转动件7贯穿机体1顶部固定连接有光伏板2,机体1的上端固定连接有太阳跟踪器3,安装室6的内部分别固定安装有蓄电池8和光伏逆变器9以及单片机10,机体1的左右两侧均固定连接有安装架11,安装架11的内侧设有调节件13,调节件13的下端设有摄像头12,机体1的内部设有内室16,调节件13的外部设有联动件14,机体1的下端左右两侧均设有稳定件17;此外在机体1内共设有2块蓄电池8,一块为主要蓄电池8为常用,另一块为次要蓄电池8为备用,备用蓄电池8接收光伏蓄电,当主要蓄电池8出现断电后,单片机10自动导通备用蓄电池8的连接电路进行续航性供电;此外进行航摄的无人机一般只在天气晴朗的时候进行,因此不需要考虑雨天的问题。
21.通过在机体1上通过转动件7安装光伏板2,太阳跟踪器3通过高处对太阳辐射光线进行跟踪,并将光照强面的方位信号传递给单片机10,单片机10对转动件7控制,使得光伏板2进行方位调节,对太阳能进行吸收后利用光伏逆变器9进行转换电能并对蓄电池8进行充电,可以有效的解决无人机高空断电易损的问题;通过在机体1两侧的安装架11上设置转动的摄像头12,利用调节件13和联动件14,可以方便对安装架11两侧的摄像头12进行广角调控,可以有效的解决无人机采集视频摄像头12广角调节过程中负重大的问题;单片机10芯片型号为stm32f103rct6,太阳跟踪器3的型号为it3415nd带自动识别mppt;光伏逆变器9的型号为品牌盛扬生产的sy-mgin-500w;摄像头12的型号为免驱动jd-ov2710-v1。
22.实施例2参考图1,在实施例1的基础上,为了达到方便对光伏板2进行角度调节的目的,本实施例对转动件7进行了创新设计,具体地,转动件7包括双头筒705,双头筒705转动连接在机体1的上端,双头筒705的下头设在安装室6的内部,双头筒705的内部固定安装有轴管701,轴管701的上端贯穿双头筒705和光伏板2的下端固定连接,轴管701的下端贯穿双头筒705固定连接有第一齿轮702,安装室6的内部固定安装有第一电机703,第一电机703的输出端固定连接有第二齿轮704,第一齿轮702和第二齿轮704为啮合连接,利用安装室6内的第一电机703带动第二齿轮704转动,第二齿轮704联动第一齿轮702使得轴管701在双头筒705的作用下带动光伏板2在机体1上端进行转动调节;光伏板2的下端左右两侧均固定连接有滑块4,机体1的上端固定安装有滑轨5,滑块4和滑轨5为滑动连接,在光伏板2上设置滑块4,可以方便光伏板2在带有滑轨5的机体1上端进行滑动,使得光伏板2转向更加稳定;滑轨5的形状呈圆形,最稳的效果可以将滑块4增加到4个。
23.实施例3参考图2-图3,本实施例在实施例1的基础上,为了达到方便对摄像头12进行调节的目的,本实施例对调节件13和联动件14进行了创新设计,具体地,调节件13包括轴杆131,轴杆131转动连接在安装架11的内侧,摄像头12固定安装在轴杆131的外部,安装架11的对侧固定连接有位板135,位板135的下端固定安装有第一轨道133,第一轨道133的内部滑动连接有第一齿条132,轴杆131的外部固定安装有第三齿轮134,第一齿条132和第三齿轮134为啮合连接,联动件14设在第一齿条132的一端,由于安装架11上设置转动的轴杆131,摄像头12安装在轴杆131上,轴杆131上增设第三齿轮134,利用安装架11对侧的位板135下端第一齿条132滑动可以联动第三齿轮134转动,使得轴杆131随着转动,方便对摄像头12进行调节;联动件14包括第二电机143,第二电机143固定安装在内室16的内侧顶部,内室16的内部固定连接有第二轨道142,第二轨道142的内部滑动连接有第二齿条145,内室16的内部转动连接有第四齿轮144,第四齿轮144和第二齿条145啮合连接,第二电机143的输出端和第四齿轮144的上端固定连接,内室16的内部滑动连接有推臂141,推臂141的一端和第二齿条145的一端固定连接,推臂141的另一端贯穿内室16和第一齿条132的一端固定连接,利用第二电机143转动驱动内室16中的第四齿轮144转动,第四齿轮144联动内室16第二轨道142上的第二齿条145同时向内室16内部或外部进行滑动,而第二齿条145的一端通过和内室16内部的推臂141连接,使得推臂141可以对第一齿条132进行推动;内室16的内部固定安装有滑套15,推臂141的一端滑动连接在滑套15的内部,在内室16上设置滑套15,可以方便推臂141进行水平滑动。
24.参考图1,为了达到对无人机进行着落保护的目的,本实施例稳定件17包括凹板171和凸板172,凹板171固定连接在机体1的下端左右两侧,凸板172滑动连接在凹板171的下端,凹板171的下端设有筒槽173,凸板172的上端固定连接有筒柱176,筒柱176的上端伸入筒槽173的内侧固定连接有滑块175,滑块175滑动连接在筒槽173的内侧,筒槽173和滑块175的对侧设有弹簧174,当机体1在着陆后,利用凸板172在凹板171下端滑动,同时凸板172着地后凸板172连接的筒柱176通过筒柱176上端的滑块175在筒槽173内滑动并利用滑块175和筒槽173之间设置的弹簧174,可以起到减震的效果,凸板174的下端粘接连接有橡胶垫18,橡胶垫18的下端设有若干凸点,在凸板174下端设置橡胶垫18,可以进一步利用橡胶垫18的弹性与地面接触,降低震动感。
25.本发明中使用原理及优点:使用过程中,将无人机通过外部遥控设备控制进行升空航摄,利用第二电机143转动驱动内室16中的第四齿轮144转动,第四齿轮144联动内室16第二轨道142上的第二齿条145同时向内室16内部或外部进行滑动,而第二齿条145的一端通过和内室16内部的推臂141连接,使得推臂141可以对第一齿条132进行推动,而第一齿条132被推动后在位板135上的第一轨道133上滑动,同时第一齿条132联动轴杆131上的第三齿轮134转动,轴杆131随着带着摄像头12发生角度转动进行调节,综上所述,当第二电机143呈顺时针转动时,摄像头12镜头同时向外,当第二电机143呈逆时针转动时,摄像头12镜头同时向内调节,此外机体1上端设置的太阳跟踪器3通过对高处对太阳辐射光线进行跟踪,并将光照强面的方位信号传递给单片机10,单片机10对转动件7控制,启动第一电机703,利用安装室6内的第一电机703带动第二齿轮704转动,第二齿轮704联动第一齿轮702使得轴管701带动光伏板2在机体1上端进行转动调节,以便于光伏板2对太阳能进行更快捷的接收,并利用光伏逆变器9进行转换电能并对蓄电池8进行充电,并对无人机进行续航,当无人机着陆后,凸板174下端增设带有凸点的橡胶垫18,首先凸面挤压产生第一次缓冲,随后橡胶垫18利用自身弹性形成第二次缓冲,而凸板172在凹板171下端滑动,同时凸板172着地后凸板172连接的筒柱176通过筒柱176上端的滑块175在筒槽173内滑动并利用滑块175和筒槽173之间设置的弹簧174,可以起到减震的效果,进行第三次缓冲,确保了无人机着陆的安全性。
26.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1