一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置
1.本发明属于微型飞行器搭载投放装置设计和制造技术领域,具体涉及一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置。
背景技术:
2.近年来洪涝、地震、台风等自然灾害频发,灾情过后受灾地区一片狼藉,现场状况十分恶劣,对受灾地区的幸存者搜救工作展开迫在眉睫,同时救援人员本身也面临着严峻的生存威胁,故需要能在复杂环境下工作的特种设备。
3.微型飞行器具有质量轻、体积小以及便于携带等特点,可以灵活进入狭窄空间进行幸存者排查救援工作,在灾后搜救抢险领域具有很好的应用前景,但其搭载运输问题以及续航时间短的缺点也制约着其工程化应用。也正是由此,研究微型飞行器的搭载与投放装置有着必要的现实意义,可进一步提高微型飞行器在抢险救灾上的优势,具有的广阔的应用前景。
4.本发明通过观察和研究海洋中的珊瑚礁石,发现其表面分布有数量众多的孔状结构,使其可以在有限的体积中藏纳众多海洋生物,可用于解决微型飞行器的搭载运输问题当中;本发明支持空中运输投放,可以实现迅速到达预定地区展开工作;本发明无需人为搬运,可自行驱动前行穿越路况复杂的环境,到达合适地点后进行微型飞行器的释放,减少其无效耗能,同时增加其有效搜寻工作时间。
技术实现要素:
5.本发明是基于珊瑚礁石表面分布有大量孔状结构以供多种海洋生物附着、重量轻盈的特性以及功能结构仿生设计思维的启发下,设计出一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置,能更可靠地实现微型飞行器的装载与投放,同时也具有可空中运输投放、自主移动的特点。
6.本发明通过如下技术方案实现:
7.一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置,由壳体a和驱动模块b组成,所述的壳体a完全包覆于驱动模块b外围;驱动模块b与壳体a内壁相接触且可以在壳体a内壁做自由滚动运动。
8.所述的壳体a由外骨架1外骨架2和发射单元阵列3组成,其中:外骨架1、外骨架2完全一致且通过插销4、插销5、插销6、插销7固定在一起,外骨架1、外骨架2拼接在一起后可形成一正二十面体框架结构,正二十面体框架每个面均由n2个完全相等的正三角形框架构成且每排正三角形框架数目均符合等差数列公式2n-1个(n为任意自然数),每个面所有正三角形框架可承载一个发射单元阵列3,插销4、插销5、插销6、插销7分别位于外骨架1、外骨架2上边缘和下边缘位置。
9.所述的发射单元阵列3由发射盒体8、发射盒体9、发射盒体10、发射盒体11、发射盒体12、发射盒体13六种尺寸盒体组成,其中:六种发射盒体以发射单元阵列3距离所在框架
面的几何中心远近不同划分为七个高度梯度,距离所在框架面的几何中心距离越近,所对应发射盒体高度越高,距离所在框架面的几何中心距离越远,对应发射盒体高度越矮,距离所在框架面的几何中心距离相等,对应发射盒体高度相同。
10.所述的发射单元阵列3包括但不限于由七种不同高度的发射盒体组成,可根据每个面内三角形框架数目和使用情况,任意规定发射盒体高度划分及数目使用量。
11.以发射盒体11为例进行说明,所述的发射盒体11由载物箱14、展开面15、展开面16、展开面17、展开面18组成,其中:载物箱14为三棱柱壳体结构,其底面插入外骨架1、外骨架2的每个三角形框架内,展开面15、展开面16、展开面17只有底边与载物箱14相连,其余各侧边均不互相连接,展开面18只与展开面17相连接,与展开面15、展开面16均不连接。
12.所述的发射盒体内安置有执行任务的微型飞行器或降落伞,每个框架面内的全部盒体选取一个或多个盒体安置降落伞,其余盒体安置执行任务的微型飞行器。
13.所述的驱动模块b由层-底连杆19、层板20、底板21、顶板22、推进臂23组成,其中:底板21位于层板20下侧空间,层板20位于底板21上侧空间且位于顶板22下侧空间,顶板22位于层板20上侧空间,底板21、层板20、顶板22均为圆形载驮面且三者圆心分布于公共轴线上,底板21、层板20由三根层-底连杆19连接支撑,3根层-底连杆19为柱体,与底板21共圆心以等间距圆周阵列分布,推进臂23位于顶板22上侧空间,推进臂23末端圆槽口嵌套在顶板22上连接杆上且可以绕连接杆轴线做自由转动。
14.所述的底板21由左路驱动轮24、前向舵机25、前向载重架26、后向载重架27、后向舵机28、右路驱动轮29、右路电机30、承载固定板31、左路电机32组成,其中:承载固定板31作为底板21主体部分,左路电机32、右路电机30固定在承载固定板31两侧,左路驱动轮24、右路驱动轮29分别与左路电机32、右路电机30轴向连接,前向舵机25、后向舵机28固定于承载固定板31下侧空间,前向载重架26、后向载重架27位于承载固定板31下侧空间,分别与前向舵机25、后向舵机28轴向连接,两个载重架均置有等重配重块。
15.所述的承载固定板31由左侧电机固定圈33、连杆槽34、电源箱35、电芯组36、步进电机槽37、右侧电机固定圈38、主控板槽39、主控板40、前端舵机附着架41、后端舵机附着架42组成,其中:左侧电机固定圈33、右侧电机固定圈38分别位于承载固定板31左右两侧,左路电机32、右路电机30分别插进左侧电机固定圈33、右侧电机固定圈38内部,电源箱35为方形薄壁结构,位于承载固定板31上侧空间前端,电芯组36为固体锂电芯通过串联或并联连接方式组成的电芯组,安放于电源箱35内部,步进电机槽37为不规则八边形薄壁结构,位于承载固定板31上侧空间正中心,主控板槽39位为方形薄壁结构,位于承载固定板上侧空间41后端,主控板40为单片机控制电路,安放于主控板槽39内部,前端舵机附着架41、后端舵机附着架42分别固定于承载固定板31下侧空间前端和后端,中间通孔分别固定前向舵机25、后向舵机28轴,连杆槽34位于承载固定板31上平面,三根层-底连杆19固定于连杆槽34。
16.所述的层板20由行星齿轮43、步进电机44、顶-层连杆45、连杆槽46组成,其中:行星齿轮43作为层板20主体部分,太阳轮作为主动轮,外齿圈锁死,行星架作为从动轮,步进电机44位于行星齿轮43下侧空间正下方,步进电机44轴轴向穿过行星齿轮43的太阳轮,3根顶-层连杆45位于行星齿轮43上侧空间,分别插在行星齿轮43每个行星齿轮轴心位置,三个连杆槽46位于行星齿轮43下侧空间,分别与每根层-底连杆19正相对。
17.所述的顶板22由载物板47、空气压缩机盒48、空气压缩机49、顶板舵机盒50、顶板
舵机51、连杆槽52组成,其中:载物板47作为顶板22的主体部分,为一圆形圆盘,顶板舵机盒50位于载物板47上侧空间,边侧开有圆形槽口,顶板舵机51侧放于顶板舵机盒50内,顶板舵机51舵机轴穿过顶板舵机盒50边侧圆形槽口,空气压缩机盒48位于载物板47上侧空间且与顶板舵机盒50关于载物板47圆心轴线呈中心轴对称分布,空气压缩机盒48边侧开有圆形槽口且与顶板舵机盒50边侧圆形槽口轴线重合,空气压缩机49侧放于空气压缩机盒48内,空气压缩机49送气口穿过空气压缩机盒48边侧圆形槽口,三个连杆槽52位于载物板47下侧空间,分别与每根顶-层连杆45正相对。
18.所述的推进臂23由推进臂外壳53、联轴器54、丝杆滑块55、推动头56、丝杆57、通气管58、臂内电机59组成,其中:推进臂外壳53完全包覆联轴器54、丝杆滑块55、推动头56、丝杆57、通气管58、臂内电机59,推进臂外壳53前端为一首端开口、尾端封闭的圆管结构,后端为一尾端开有通孔的薄板结构,臂内电机59固定于推进臂外壳53内侧空间圆管尾端,电机轴与联轴器54相连,边侧有通气管58通过,联轴器54位于推进臂外壳53内侧空间,首端与丝杆57尾端相连,尾端与臂内电机59电机轴相连,丝杆57位于推进臂外壳53内侧空间,尾端与联轴器54首端相连,丝杆57贯穿丝杆滑块55,丝杆滑块55位于推进臂外壳53内侧空间,丝杆滑块55宽沿侧壁紧贴推进臂外壳53内壁且可以自由滑动,丝杆滑块55可在丝杆57上做自由上下移动,边侧有通气管58贯穿通过,通气管58位于推进臂外壳53内侧空间,通气管58尾端连接空气压缩机49,经过并贯穿推进臂外壳53后端、臂内电机59、联轴器54,前端贯穿联轴器54一段距离后终止且不会到达推动头56末端空间,推动头56位于推进臂外壳53内侧空间,推动头56宽沿侧壁紧贴推进臂外壳53内壁且可以自由滑动,推动头56沿推进臂外壳53轴向方向可从推进臂外壳53开口处向外伸出一部分且不会滑离推进臂外壳53。
19.所述的推动头56由金属塞60、橡胶塞61、金属塞62、推头63、推头连柱64、红外探头65组成,其中:金属塞60位于推动头56末端且侧壁紧贴推进臂外壳53内壁,可以自由滑动,金属塞60与上表面与橡胶塞61下表面相接触,橡胶塞61下表面与金属塞60上表面相接触且上表面与金属塞62相接触,被金属塞60、金属塞62相夹,橡胶塞61侧壁紧贴推进臂外壳53内壁且可以自由滑动,金属塞62下表面与橡胶塞61上表面相接触,金属塞62侧壁紧贴推进臂外壳53内壁且可以自由滑动,红外探头65为一对红外发送-接收传感器,安置在金属塞62上表面,与推头连柱64相平行,推头连柱64后端连接金属塞62上表面,前端连接推头63下表面,为一圆柱体结构,推头63下表面与推头连柱64相连,为一拉伸台体结构。
附图说明
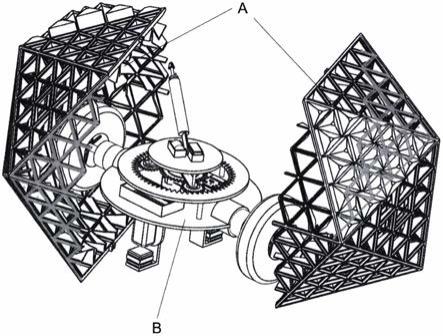
20.图1为一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置整体结构图
21.图2为壳体结构图
22.图3为外骨架结构图
23.图4为发射单元阵列结构图
24.图5为发射盒体结构图
25.图6为驱动模块结构图
26.图7为底板结构图
27.图8为承载固定板结构俯视图
28.图9为承载固定板结构仰视图
29.图10为层板结构俯视图
30.图11为层板结构仰视图
31.图12为顶板结构图
32.图13为推进臂结构图
33.图14为推进臂结构图
34.图15为推进臂内部结构图
35.图16为推动头结构图
36.其中:a.壳体 b.驱动模块 1.外骨架 2.外骨架 3.发射单元阵列 4.插销 5.插销 6.插销 7.插销 8.发射盒体 9.发射盒体 10.发射盒体 11.发射盒体 12.发射盒体 13.发射盒体 14.载物箱 15.展开面 16.展开面 17.展开面 18.展开面 19.层-底连杆 20.层板 21.底板 22.顶板 23.推进臂 24.左路驱动轮 25.前向舵机 26.前向载重架 27.后向载重架 28.后向舵机 29.右路驱动轮 30.右路电机 31.承载固定板 32.左路电机 33.左侧电机固定圈 34.连杆槽 35.电源箱 36.电芯组 37.步进电机槽 38.右侧电机固定圈 39.主控板槽 40.主控板 41.前端舵机附着架 42.后端舵机附着架 43.行星齿轮 44.步进电机 45.顶-层连杆 46.连杆槽 47.载物板 48.空气压缩机盒 49.空气压缩机 50.顶板舵机盒 51.顶板舵机 52.连杆槽 53.推进臂外壳 54.联轴器 55.丝杆滑块 56.推动头 57.丝杆 58.通气管 59.臂内电机 60.金属塞 61.橡胶塞 62.金属塞 63.推头 64.推头连柱 65.红外探头。
具体实施方式
37.下面结合附图对本发明进行描述。
38.如图1所示,一种可空投自驱动仿珊瑚礁结构微型飞行器搭载投放装置,由壳体a和驱动模块b组成,所述的壳体a完全包覆于驱动模块b外围,驱动模块b与壳体a内壁相接触且可以在壳体a内壁做自由滚动运动。驱动模块b在壳体a内部执行前进、后退、左转、右转运动时,推动壳体a按照相同运动模式旋滚移动,壳体a结构为刚体,不会随着行进过程中与驱动模块b或外部障碍物的碰撞产生形变。
39.如图2、图3所示,所述的壳体a由外骨架1外骨架2和发射单元阵列3组成,其中外骨架1、外骨架2完全一致且通过插销4、插销5、插销6、插销7固定在一起,外骨架1、外骨架2拼接在一起后可形成一正二十面体框架结构,正二十面体框架每个面均由n2个完全相等的正三角形框架构成且每排正三角形框架数目均符合等差数列公式2n-1个(n为任意自然数),每个面所有正三角形框架可承载一个发射单元阵列3,插销4、插销5、插销6、插销7分别位于外骨架1、外骨架2上边缘和下边缘位置。外骨架1、外骨架2闭合在一起时,外部为一正二十面体结构,内部可视为掏去一个内接球体形成的球面,驱动模块b在该球面上做滚动运动,每个发射单元阵列3可嵌插在一个平面框架内,最多可以嵌插20个发射单元阵列3,外骨架1、外骨架2所有面全部携载有发射单元阵列3时,整个壳体a可近似看成一个球体,向前滚动行进时可以显著减小移动过程中障碍物的阻碍。
40.如图4所示,所述的壳体a由外骨架1外骨架2和发射单元阵列3组成,发射单元阵列3由发射盒体8、发射盒体9、发射盒体10、发射盒体11、发射盒体12、发射盒体13六种尺寸盒体组成,其中六种发射盒体以发射单元阵列3距离所在框架面的几何中心远近不同划分为
七个高度梯度,距离所在框架面的几何中心距离越近,所对应发射盒体高度越高,距离所在框架面的几何中心距离越远,对应发射盒体高度越矮,距离所在框架面的几何中心距离相等,对应发射盒体高度相同。壳体a由外骨架1外骨架2和发射单元阵列3组成,发射单元阵列3包括但不限于由七种不同高度的发射盒体组成,可根据每个面内三角形框架数目和使用情况,任意规定发射盒体高度划分及数目使用量。发射单元阵列3由发射盒体8、发射盒体9、发射盒体10、发射盒体11、发射盒体12、发射盒体13六种尺寸盒体组成,其中以发射盒体11为例进行说明,发射盒体11由载物箱14、展开面15、展开面16、展开面17、展开面18组成,载物箱14为三棱柱壳体结构,其底面插入外骨架1、外骨架2的每个三角形框架内,展开面15、展开面16、展开面17只有底边与载物箱14相连,其余各侧边均不互相连接,展开面18只与展开面17相连接,与展开面15、展开面16均不连接,装置行进到指定位置后,推进臂23按控制程序指令索寻到准备发射的发射盒体,推动头56向前延伸,推动发射盒体11的载物箱14底面,发射盒体11远离但并不与壳体a表面分开,过程中展开面15、展开面16、展开面17均向外侧空间展开释放出侧向空间,同时展开面17带动展开面18展开,释放出顶部空间,载物箱14内安置的微型飞行器即可起飞执行工作,推动过程中推动头56向前延伸速度较慢,不会对微型飞行器产生破坏。
41.如图5所示,所述的发射盒体内安置有执行任务的微型飞行器或降落伞,每个框架面内的全部盒体选取一个或多个盒体安置降落伞,其余盒体安置执行任务的微型飞行器,装置可由运载飞行器从高空中投撒释放,到达预定高度时,安置有降落伞模块的盒体由推进臂23触发启动,降落伞弹出,减速装置的降落速度,落地后降落伞从装置机身脱落,完成整个降落过程。
42.如图6所示,所述的驱动模块b由层-底连杆19、层板20、底板21、顶板22、推进臂23组成,其中底板21位于层板20下侧空间,层板20位于底板21上侧空间且位于顶板22下侧空间,顶板22位于层板20上侧空间,底板21、层板20、顶板22均为圆形载驮面且三者圆心分布于公共轴线上,底板21、层板20由三根层-底连杆19连接支撑,3根层-底连杆19为柱体,与底板21共圆心以等间距圆周阵列分布,推进臂23位于顶板22上侧空间,推进臂23末端圆槽口嵌套在顶板22上连接杆上且可以绕连接杆轴线做自由转动,底板21作为整个驱动模块b的承载板,是其余各个部分的安装与着力固定模块,同时控制核心、驱动装置、能量装置都安装在底板21上,层板20为上面的顶板22、推进臂23机构提供一个水平面转动自由度,同时支撑顶板22、推进臂23,顶板22承载着推进臂23,同时为推进臂23提供一个竖直方向的转动自由度。顶板22安放有支持推进臂23工作的效应器,用以控制推进臂23的工作,层-底连杆19将层板与下方空间的底板相隔开产生一段空间,用以安放布置控制器、能量装置、诸多电力器件。
43.如图7所示,所述的底板21由左路驱动轮24、前向舵机25、前向载重架26、后向载重架27、后向舵机28、右路驱动轮29、右路电机30、承载固定板31、左路电机32组成,其中承载固定板31作为底板21主体部分,所述的左路电机32、右路电机30固定在承载固定板31两侧,所述的左路驱动轮24、右路驱动轮29分别与左路电机32、右路电机30轴向连接,所述的前向舵机25、后向舵机28固定于承载固定板31下侧空间,所述的前向载重架26、后向载重架27位于承载固定板31下侧空间,分别与前向舵机25、后向舵机28轴向连接,两个载重架均置有等重配重块。承载固定板31对其余各个模块起到承载固定作用,左路电机32、右路电机30经减
速箱减速后分别带动左路驱动轮24、右路驱动轮29,左路电机32、右路电机30同向同速正转时,机体向前运动,左路电机32、右路电机30同向同速倒转时,机体向后运动,左路电机32转速高于右路电机30时,机体向右转动,左路电机32转速低于右路电机30时,机体向左转动,前向舵机25、后向舵机28固定在承载固定板31对应下方延伸部分,分别带动前向载重架26、后向载重架27转动,前向载重架26、后向载重架27上安装有配重块,通过前向舵机25、后向舵机28的控制用以保持装置的平衡,减小装置摆动的幅度和回复平和的时间,当机身向左摆动时,前向载重架26、后向载重架27向右偏转,减小机身向左摆动幅度,当机身向右摆动时,前向载重架26、后向载重架27向左偏转,减小机身向右摆动幅度。
44.如图8、图9所示,所述的承载固定板31由左侧电机固定圈33、连杆槽34、电源箱35、电芯组36、步进电机槽37、右侧电机固定圈38、主控板槽39、主控板40、前端舵机附着架41、后端舵机附着架42组成,其中左侧电机固定圈33、右侧电机固定圈38分别位于承载固定板31左右两侧,左路电机32、右路电机30分别插进左侧电机固定圈33、右侧电机固定圈38内部,电源箱35为方形薄壁结构,位于承载固定板31上侧空间前端,电芯组36为固体锂电芯通过串联或并联连接方式组成的电芯组,安放于电源箱35内部,步进电机槽37为不规则八边形薄壁结构,位于承载固定板31上侧空间正中心,主控板槽39位为方形薄壁结构,位于承载固定板上侧空间41后端,主控板40为单片机控制电路,安放于主控板槽39内部,前端舵机附着架41、后端舵机附着架42分别固定于承载固定板31下侧空间前端和后端,中间通孔分别固定前向舵机25、后向舵机28轴,连杆槽34位于承载固定板31上平面,三根层-底连杆19固定于连杆槽34。
45.如图10、图11所示,所述的层板20由行星齿轮43、步进电机44、顶-层连杆45、连杆槽46组成,其中行星齿轮43作为层板20主体部分,太阳轮作为主动轮,外齿圈锁死,行星架作为从动轮,步进电机44位于行星齿轮43下侧空间正下方,步进电机44轴轴向穿过行星齿轮43的太阳轮,3根顶-层连杆45位于行星齿轮43上侧空间,分别嵌在行星齿轮43每个行星齿轮轴心位置,三个连杆槽46位于行星齿轮43下侧空间,分别与每根层-底连杆19正相对。步进电机44控制行星齿轮43太阳轮的转动,外齿圈被三根层-底连杆19锁死,三个从动轮构成的行星架围绕太阳轮做同轴逆向转动,行星架上伸出的三根顶-层连杆45与顶板22相固定,顶板22随着三个从动轮的转动而转动,以此实现步进电机44对顶板22转动角度的控制。
46.如图12、图13所示,所述的顶板22由载物板47、空气压缩机盒48、空气压缩机49、顶板舵机盒50、顶板舵机51、连杆槽52组成,其中载物板47作为顶板22的主体部分,为一圆形圆盘,顶板舵机盒50位于载物板47上侧空间,边侧开有圆形槽口,顶板舵机51侧放于顶板舵机盒50内,顶板舵机51舵机轴穿过顶板舵机盒50边侧圆形槽口,空气压缩机盒48位于载物板47上侧空间且与顶板舵机盒50关于载物板47圆心轴线呈中心轴对称分布,空气压缩机盒48边侧开有圆形槽口且与顶板舵机盒50边侧圆形槽口轴线重合,空气压缩机49侧放于空气压缩机盒48内,空气压缩机49送气口穿过空气压缩机盒48边侧圆形槽口,三个连杆槽52位于载物板47下侧空间,分别与每根顶-层连杆45正相对。顶板舵机51控制推进臂23在竖直平面的转动,角度范围为0
°
——180
°
,空气压缩机49工作时压缩外界空气提供给推进臂23,提供压缩空气作为推进臂23内的气压装置推进臂23轴向推进运动的动力介质。
47.如图14、图15所示,所述的推进臂23由推进臂外壳53、联轴器54、丝杆滑块55、推动头56、丝杆57、通气管58、臂内电机59组成,其中推进臂外壳53完全包覆联轴器54、丝杆滑块
55、推动头56、丝杆57、通气管58、臂内电机59,推进臂外壳53前端为一首端开口、尾端封闭的圆管结构,后端为一尾端开有通孔的薄板结构,臂内电机59固定于推进臂外壳53内侧空间圆管尾端,电机轴与联轴器54相连,边侧有通气管58通过,联轴器54位于推进臂外壳53内侧空间,首端与丝杆57尾端相连,尾端与臂内电机59电机轴相连,丝杆57位于推进臂外壳53内侧空间,尾端与联轴器54首端相连,丝杆57贯穿丝杆滑块55,丝杆滑块55位于推进臂外壳53内侧空间,丝杆滑块55宽沿侧壁紧贴推进臂外壳53内壁且可以自由滑动,丝杆滑块55可在丝杆57上做自由上下移动,边侧有通气管58贯穿通过,通气管58位于推进臂外壳53内侧空间,通气管58尾端连接空气压缩机49,经过并贯穿推进臂外壳53后端、臂内电机59、联轴器54,前端贯穿联轴器54一段距离后终止且不会到达推动头56末端空间,推动头56位于推进臂外壳53内侧空间,推动头56宽沿侧壁紧贴推进臂外壳53内壁且可以自由滑动。推动头56沿推进臂外壳53轴向方向可从推进臂外壳53开口处向外伸出一部分且不会滑离推进臂外壳53,进臂外壳53除顶端开口外为全密封,进臂外壳53内壁与丝杆滑块55上表面、推动头下表面形成的空间作为一密闭气室,外界空气只能通过与空气压缩机49相连的通气管58进出密闭气室,推进臂23工作时,空气压缩机49压缩空气,高压空气通过通气管58送到密闭气室内,臂内电机59转动,通过联轴器54控制丝杆57做同向、同角度转动,当臂内电机59正转时,丝杆57上的丝杆滑块55向上做平移,密闭气室体积缩小,内部气压进一步增大,推动推动头56向外伸出,当臂内电机59转时,丝杆57上的丝杆滑块55向下做平移,密闭气室体积增大,内部气压相对减小,推动头56向内收缩,以此实现推进臂23的整个推动过程,通气管58选用弹性材料设计,在整个推进过程中会随着丝杆滑块55的运动产生相同方向的弹性形变。
48.如图16所示,所述的推动头56由金属塞60、橡胶塞61、金属塞62、推头63、推头连柱64、红外探头65组成,其中金属塞60位于推动头56末端且侧壁紧贴推进臂外壳53内壁,可以自由滑动,金属塞60与上表面与橡胶塞61下表面相接触,橡胶塞61下表面与金属塞60上表面相接触且上表面与金属塞62相接触,被金属塞60、金属塞62相夹,橡胶塞61侧壁紧贴推进臂外壳53内壁且可以自由滑动,金属塞62下表面与橡胶塞61上表面相接触,金属塞62侧壁紧贴推进臂外壳53内壁且可以自由滑动,红外探头65为一对红外发送-接收传感器,安置在金属塞62上表面,与推头连柱64相平行,推头连柱64后端连接金属塞62上表面,前端连接推头63下表面,为一圆柱体结构,推头63下表面与推头连柱64相连,为一拉伸台体结构。推动头56底部活塞采用金属-橡胶-金属三层介质设计,底层的金属塞60与密闭气室内的压缩空气接触,防止空气对推动头56其他部分氧化腐蚀,橡胶塞61在推动头56的反复最近运动中起到缓冲作用,减小刚性碰撞对推动头56的磨损,金属塞62为红外探头65、推头连柱64起到承载、着力作用,红外探头65通过程序控制红外信号的发送与接收,判断与前方物体的具体距离,用以找到对应发射盒体并在推头63与发射盒体的接触过程中进行准确定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1