小型高轨卫星的自主变轨方法与流程
1.本发明涉及航空航天技术领域,特别涉及一种小型高轨卫星的自主变轨方法。
背景技术:
2.国内外高轨通信卫星平台中超过50%均采用了混合推进系统,如洛克希德马丁公司的a2100平台、波音公司bss-702mp/hp平台、泰雷兹的alphabus平台、中国东方红公司的dfh-4/dfh-5平台等,混合推进系统代表了国内外高轨通信卫星平台的主要推进技术路线。
3.国内外高轨通信卫星主要应用化学推进变轨、电推进位保,而当化学推进变轨出现故障时,可以牺牲寿命应用电推进完成变轨任务,如美国极高频卫星。国内外混合推进系统往往采用化学推进系统作为卫星变轨的主力,电推进系统进行在轨位置保持,不仅因化学推进比冲低而使得卫星规模巨大,且当化学推进系统出现故障时,虽然有可能采用电推进系统耗费较长时间接力完成变轨任务,但卫星在轨寿命的丧失和冗余配置的失效均直接代表了任务的失败。
技术实现要素:
4.本发明的目的在于提供一种小型高轨卫星的自主变轨方法,以解决现有的国内外高轨通信卫星化学推进变轨故障导致任务的失败的问题。
5.为解决上述技术问题,本发明提供一种小型高轨卫星的自主变轨方法,包括:
6.在第一阶段,首先星箭分离后,确定分离轨道初始瞬间根数,同时变轨化学推力器和姿控化学推力器排气,并进行变轨化学推力器和姿控化学推力器的状态设置,且对电推力器进行排气设置、标定设置和状态设置;
7.关闭电推力器,打开变轨化学推力器,确定并上注第一阶段的变轨策略,判断星上是否具备变轨状态?
8.若是,则以近地点高度调整至8000km以上并保证国内测控弧段不小于3小时为控制目标,按第一阶段的变轨策略开始变轨,否则返回至星箭分离步骤;
9.开始变轨后,判断卫星是否进入远地点点火弧段,若是则建立化学推力器变轨点火姿态,变轨化学推力器点火,出点火弧段后关闭变轨化学推力器,转为对地偏航姿态,否则回到上一步骤;
10.转为对地偏航姿态后,判断近地点高度是否调整至8000km,若是则第一阶段变轨结束,关闭变轨化学推力器,否则返回至按变轨策略开始变轨的步骤。
11.可选的,在所述的小型高轨卫星的自主变轨方法中,通过三个阶段将小型地球静止轨道卫星从地球转移轨道转移至地球静止轨道,包括:
12.在第一阶段,变轨化学推力器点火,以快速提升轨道近地点高度至第一高度以上,且国内测控弧段不小于阈值测控弧段为控制目标执行变轨;
13.在第二阶段,电推力器以所述轨道近地点高度调整至第二高度的同时,轨道倾角调整至阈值倾角、轨道偏心率调整至阈值偏心率为控制目标执行变轨;
14.在第三阶段,姿控化学推力器点火,以进入目标轨位精度范围内为目标执行定点捕获。
15.可选的,在所述的小型高轨卫星的自主变轨方法中,所述第一高度为8000km,所述第二高度为35786km,所述阈值测控弧段为3小时,所述阈值倾角为0度,所述阈值偏心率为0度;
16.在所述第一阶段内还执行:
17.所述变轨化学推力器在120小时内将小型地球静止轨道卫星的轨道近地点高度提升至第一高度以上;
18.所述小型地球静止轨道卫星的轨道近地点高度提升至第一高度后,关闭所述变轨化学推力器。
19.可选的,在所述的小型高轨卫星的自主变轨方法中,在所述第二阶段内还执行:
20.在所述电推力器执行变轨前,执行第一次测定轨,以获得第二阶段初始轨道精轨根数、卫星总质量及质心,根据所述第一次测定轨的结果设置所述电推力器状态;
21.所述第二阶段的控制目标达成后,关闭所述电推力器;
22.当所述电推力器进入近地点前1.5小时时,所述电推力器自动关机,所述小型地球静止轨道卫星由所述电推力器点火时的变轨对日模式自动转换至对地保持模式;
23.当所述电推力器进入近地点后1.5小时时,所述小型地球静止轨道卫星由对地保持模式自动转换至所述电推力器点火时的变轨对日模式,所述电推力器自动开机点火变轨。
24.可选的,在所述的小型高轨卫星的自主变轨方法中,在所述第三阶段内还执行:
25.所述姿控化学推力器点火前,执行第二次测定轨,以获得第三阶段初始轨道精轨根数、卫星总质量及质心,根据所述第二次测定轨的结果设置所述姿控化学推力器状态;
26.进入目标轨位精度范围内之后,关闭所述姿控化学推力器且切断变轨化学推力器工质流以保证定点后推进系统安全。
27.可选的,在所述的小型高轨卫星的自主变轨方法中,在第二阶段,第一次测定轨获得第二阶段初始轨道精轨根数,测定卫星总质量及质心,设置电推力器状态;
28.接下来确定并上注电推力器点火变轨策略,判断星上是否具备变轨姿态,若是则以同时调整轨道高度和倾角为控制目标,按策略开始变轨,否则返回至第一次测定轨步骤;
29.开始变轨后,卫星姿态保持变轨对日模式,打开电推力器点火,接下来判断是否进入近地点关机状态,近地点关机状态为近地点前后约1.5小时内,若是则关闭电推力器,姿态转入对地惯性保持模式,否则返回至上一步骤;
30.姿态转入对地惯性保持模式后,判断轨道倾角、偏心率是否调整至约0度,若否则返回至开始变轨步骤;
31.若是则继续判断轨道近地点高度是否调整至约35786km,若轨道近地点高度调整至约35786km则第二阶段变轨结束,关闭电推力器,否则返回至开始变轨步骤。
32.可选的,在所述的小型高轨卫星的自主变轨方法中,在第三阶段,第二次测定轨获得第三阶段初始轨道精轨根数,测定卫星总质量及质心,设置姿控化学推力器状态;
33.确定并上注姿控化学推力器定点捕获策略,建立点火姿态及姿控化学推力器方向角,判断星上是否具备定点捕获状态,若是则姿控化学推力器点火,以进入目标轨位精度范
围内为目标实施定点捕获,否则返回至第二次测定轨步骤;
34.点火后,判断是否定点至目标轨位精度范围内,若是则关闭姿控化学推力器,切断变轨化学推力器工质流,否则返回至实施定点捕获步骤;
35.关闭姿控化学推力器后,第三次测定轨获得精轨根数,测定卫星总质量及质心,上注卫星位保策略,第三阶段变轨结束。
36.可选的,在所述的小型高轨卫星的自主变轨方法中,还包括:
37.所述变轨化学推力器出现故障时,所述姿控化学推力器和/或所述电推力器作为备份;
38.所述电推力器出现故障时,所述姿控化学推力器和/或所述变轨化学推力器作为备份;
39.所述姿控化学推力器出现故障时,所述变轨化学推力器和/或所述电推力器作为备份。
40.可选的,在所述的小型高轨卫星的自主变轨方法中,
41.所述小型地球静止轨道卫星的发射质量2300kg,运载发射所述小型地球静止轨道卫星至超地球同步轨道,
42.所述超地球同步轨道的远地点高度为48000km,所述超地球同步轨道的倾角为28.5度;
43.所述小型地球静止轨道卫星的发射点为东经101度
±
0.05度;
44.所述变轨化学推力器的额定推力为150n,数量为2台;
45.所述电推力器的额定推力为300mn,数量为4台,2个电推力器并排布置组成一组电推力组,两组电推力组呈对角线分布;
46.所述姿控化学推力器的额定推力为10n,数量为4台,1个变轨化学推力器与2个姿控化学推力器组成一组化学推力组,两组化学推力组呈对角线分布。
47.本发明综合化学推进与电推进的优势,选择以电推力器变轨为主降低卫星重量,选择采用变轨化学推力器快速穿过内辐射带以规避恶劣空间环境,选择采用姿控化学推进定点捕获以保证定点效率;电推进、变轨化学推进、姿控化学推进互相耦合备份,极大增强了系统任务实现的鲁棒性和可靠性;变轨过程分为三步且互为备份的混合推进系统实施变轨,属于国内外首次,有稳妥可靠和变轨高效等特点,充分发挥了化学推进高推力避开恶劣空间环境和电推进高比冲等特点,适用于小型高轨卫星的自主变轨,保障了小型高轨卫星高性价比设计和快速入轨任务的实现。
48.在本发明提供的小型高轨卫星的自主变轨方法中,通过变轨化学推力器在第一阶段点火,以快速提升轨道近地点高度至第一高度以上,且国内测控弧段不小于阈值测控弧段为控制目标执行变轨,电推力器在第二阶段以所述轨道近地点高度调整至第二高度的同时,轨道倾角调整至阈值倾角、轨道偏心率调整至阈值偏心率为控制目标执行变轨,姿控化学推力器在第三阶段点火,以进入目标轨位精度范围内为目标执行定点捕获,实现了基于小型高轨卫星公用平台的混合推进组合系统设计开展,以达到稳妥可靠和变轨高效的优点,充分发挥了化学推进高推力避开恶劣空间环境和电推进高比冲等特点,适用于小型高轨卫星的自主变轨,保障了小型高轨卫星高性价比设计和快速入轨任务的实现。
附图说明
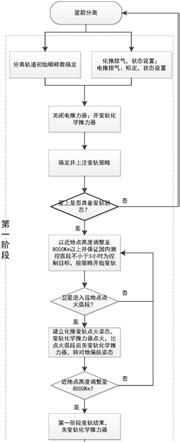
49.图1是本发明一实施例小型高轨卫星的自主变轨方法第一阶段流程示意图;
50.图2是本发明一实施例小型高轨卫星的自主变轨方法第二阶段流程示意图;
51.图3是本发明一实施例小型高轨卫星的自主变轨方法第三阶段流程示意图;
52.图4是本发明一实施例小型高轨卫星的自主变轨方法中轨道半长轴及轨道偏心率变化过程示意图;
53.图5是本发明一实施例小型高轨卫星的自主变轨方法中轨道倾角变化过程示意图。
具体实施方式
54.以下结合附图和具体实施例对本发明提出的小型高轨卫星的自主变轨方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
55.另外,除非另行说明,本发明的不同实施例中的特征可以相互组合。例如,可以用第二实施例中的某特征替换第一实施例中相对应或功能相同或相似的特征,所得到的实施例同样落入本技术的公开范围或记载范围。
56.本发明的核心思想在于提供一种小型高轨卫星的自主变轨方法,以解决现有的国内外高轨通信卫星化学推进变轨故障导致任务的失败的问题。
57.为实现上述思想,本发明提供了一种小型高轨卫星的自主变轨方法,包括:在第一阶段,首先星箭分离后,确定分离轨道初始瞬间根数,同时变轨化学推力器和姿控化学推力器排气,并进行变轨化学推力器和姿控化学推力器的状态设置,且对电推力器进行排气设置、标定设置和状态设置;关闭电推力器,打开变轨化学推力器,确定并上注第一阶段的变轨策略,判断星上是否具备变轨状态?若是,则以近地点高度调整至8000km以上并保证国内测控弧段不小于3小时为控制目标,按第一阶段的变轨策略开始变轨,否则返回至星箭分离步骤;开始变轨后,判断卫星是否进入远地点点火弧段,若是则建立化学推力器变轨点火姿态,变轨化学推力器点火,出点火弧段后关闭变轨化学推力器,转为对地偏航姿态,否则回到上一步骤;转为对地偏航姿态后,判断近地点高度是否调整至8000km,若是则第一阶段变轨结束,关闭变轨化学推力器,否则返回至按变轨策略开始变轨的步骤。
58.本实施例提供一种小型高轨卫星的自主变轨方法,如图1~3所示,包括:通过三个阶段将小型地球静止轨道卫星从地球转移轨道转移至地球静止轨道,具体包括:在第一阶段,变轨化学推力器点火,以快速提升轨道近地点高度至第一高度以上,且国内测控弧段不小于阈值测控弧段为控制目标执行变轨;在第二阶段,电推力器以所述轨道近地点高度调整至第二高度的同时,轨道倾角调整至阈值倾角、轨道偏心率调整至阈值偏心率为控制目标执行变轨;在第三阶段,姿控化学推力器点火,以进入目标轨位精度范围内为目标执行定点捕获。
59.在本发明的一个实施例中,如图4~5所示,在所述的小型地球静止轨道卫星轨道转移方法中,所述第一高度为8000km,所述第二高度为35786km,所述阈值测控弧段为3小时,所述阈值倾角为0度,所述阈值偏心率为0度。
60.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,在所述第一阶段内还执行:所述变轨化学推力器在120小时内将小型地球静止轨道卫星的轨道近地点高度提升至第一高度以上;所述小型地球静止轨道卫星的轨道近地点高度提升至第一高度后,关闭所述变轨化学推力器。
61.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,在所述第二阶段内还执行:在所述电推力器执行变轨前,执行第一次测定轨,以获得第二阶段初始轨道精轨根数、卫星总质量及质心,根据所述第一次测定轨的结果设置所述电推力器状态;所述第二阶段的控制目标达成后,关闭所述电推力器。
62.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,在所述第二阶段内还执行:当所述电推力器进入近地点前1.5小时时,所述电推力器自动关机,所述小型地球静止轨道卫星由所述电推力器点火时的变轨对日模式自动转换至对地保持模式;当所述电推力器进入近地点后1.5小时时,所述小型地球静止轨道卫星由对地保持模式自动转换至所述电推力器点火时的变轨对日模式,所述电推力器自动开机点火变轨。
63.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,在所述第三阶段内还执行:所述姿控化学推力器点火前,执行第二次测定轨,以获得第三阶段初始轨道精轨根数、卫星总质量及质心,根据所述第二次测定轨的结果设置所述姿控化学推力器状态;进入目标轨位精度范围内之后,关闭所述姿控化学推力器且切断变轨化学推力器工质流以保证定点后推进系统安全。
64.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,还包括:所述变轨化学推力器出现故障时,所述姿控化学推力器和/或所述电推力器作为备份;所述电推力器出现故障时,所述姿控化学推力器和/或所述变轨化学推力器作为备份;所述姿控化学推力器出现故障时,所述变轨化学推力器和/或所述电推力器作为备份。
65.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移方法中,所述小型地球静止轨道卫星的发射质量2300kg,运载发射所述小型地球静止轨道卫星至超地球同步轨道,所述超地球同步轨道的远地点高度为48000km,所述超地球同步轨道的倾角为28.5度;所述小型地球静止轨道卫星的发射点为东经101度
±
0.05度。
66.本实施例还提供一种小型地球静止轨道卫星轨道转移系统,通过三个阶段将小型地球静止轨道卫星从地球转移轨道转移至地球静止轨道,包括:变轨化学推力器,被配置为在第一阶段点火,以快速提升轨道近地点高度至第一高度以上,且国内测控弧段不小于阈值测控弧段为控制目标执行变轨;电推力器,被配置为在第二阶段以所述轨道近地点高度调整至第二高度的同时,轨道倾角调整至阈值倾角、轨道偏心率调整至阈值偏心率为控制目标执行变轨;姿控化学推力器,被配置为在第三阶段点火,以进入目标轨位精度范围内为目标执行定点捕获。
67.在本发明的一个实施例中,在所述的小型地球静止轨道卫星轨道转移系统中,所述变轨化学推力器的额定推力为150n,数量为2台;所述电推力器的额定推力为300mn,数量为4台,2个电推力器并排布置组成一组电推力组,两组电推力组呈对角线分布;所述姿控化学推力器的额定推力为10n,数量为4台,1个变轨化学推力器与2个姿控化学推力器组成一组化学推力组,两组化学推力组呈对角线分布。
68.本发明提出的小型地球静止轨道卫星轨道转移方法,利用小型高轨卫星公用平台
针对轨道转移而配置的电推力器、变轨化学推力器和姿控化学推力器的混合推进组合,结合小型地球静止轨道卫星能源特性和从地球转移轨道(gto)至地球静止轨道(geo)的空间环境,将轨道转移过程分为三个阶段实施,包括:第一阶段,以变轨化学推力器实现迅速提高近地点高度至8000km以上,并保证国内测控弧段不小于3小时为控制目标;第二阶段,以电推力器同时调整轨道高度、倾角和偏心率为控制目标,轨道近地点高度调整至约35786km,轨道倾角、偏心率调整至约0度;第三阶段,姿控化学推力器点火,以进入目标轨位精度范围内为目标实施定点捕获。
69.在第一阶段,首先星箭分离后,确定分离轨道初始瞬间根数,同时所有的化学推力器排气,并进行化学推力器的状态设置,且电推力器排气、标定、状态设置;接下来关闭电推力器,打开变轨化学推力器,确定并上注第一阶段的变轨策略(控制目标),判断星上是否具备变轨状态?若是,则以近地点高度调整至8000km以上并保证国内测控弧段不小于3小时为控制目标,按策略开始变轨,否则返回至星箭分离步骤。开始变轨后,判断卫星是否进入远地点点火弧段,若是则建立化学推力器变轨点火姿态,变轨化学推力器点火,出点火弧段后关闭变轨化学推力器,转为对地偏航姿态,否则回到上一步骤。转为对地偏航姿态后,判断近地点高度是否调整至8000km,若是则第一阶段变轨结束,关闭变轨化学推力器,否则返回至按变轨策略开始变轨的步骤。
70.在第二阶段,第一次测定轨获得第二阶段初始轨道精轨根数,测定卫星总质量及质心,设置电推力器状态;接下来确定并上注电推力器点火变轨策略,判断星上是否具备变轨姿态,若是则以同时调整轨道高度和倾角为控制目标,按策略开始变轨,否则返回至第一次测定轨步骤。开始变轨后,卫星姿态保持变轨对日模式,打开电推力器点火,接下来判断是否进入近地点关机状态(近地点前后约1.5小时内),若是则关闭电推力器,姿态转入对地惯性保持模式,否则返回至上一步骤;姿态转入对地惯性保持模式后,判断轨道倾角、偏心率是否调整至约0度,若否则返回至开始变轨步骤,若是则继续判断轨道近地点高度是否调整至约35786km,若轨道近地点高度调整至约35786km则第二阶段变轨结束,关闭电推力器,否则返回至开始变轨步骤。
71.在第三阶段,第二次测定轨获得第三阶段初始轨道精轨根数,测定卫星总质量及质心,设置姿控化学推力器状态;确定并上注姿控化学推力器定点捕获策略,建立点火姿态及姿控化学推力器方向角,判断星上是否具备定点捕获状态,若是则姿控化学推力器点火,以进入目标轨位精度范围内为目标实施定点捕获,否则返回至第二次测定轨步骤;点火后,判断是否定点至目标轨位精度范围内,若是则关闭姿控化学推力器,切断变轨化学推力器工质流,否则返回至实施定点捕获步骤。关闭姿控化学推力器后,第三次测定轨获得精轨根数,测定卫星总质量及质心,上注卫星位保策略,第三阶段变轨结束。
72.在本发明提供的小型地球静止轨道卫星轨道转移方法中,通过变轨化学推力器在第一阶段点火,以快速提升轨道近地点高度至第一高度以上,且国内测控弧段不小于阈值测控弧段为控制目标执行变轨,电推力器在第二阶段以所述轨道近地点高度调整至第二高度的同时,轨道倾角调整至阈值倾角、轨道偏心率调整至阈值偏心率为控制目标执行变轨,姿控化学推力器在第三阶段点火,以进入目标轨位精度范围内为目标执行定点捕获,实现了基于小型高轨卫星公用平台的混合推进组合系统设计开展,以达到稳妥可靠和变轨高效的优点,充分发挥了化学推进高推力避开恶劣空间环境和电推进高比冲等特点,适用于小
型高轨卫星的自主变轨,保障了小型高轨卫星高性价比设计和快速入轨任务的实现。
73.本发明综合化学推进与电推进的优势,选择以电推力器变轨为主降低卫星重量,选择采用变轨化学推力器快速穿过内辐射带以规避恶劣空间环境,选择采用姿控化学推进定点捕获以保证定点效率;电推进、变轨化学推进、姿控化学推进互相耦合备份,极大增强了系统任务实现的鲁棒性和可靠性;变轨过程分为三步且互为备份的混合推进系统实施变轨,属于国内外首次,有稳妥可靠和变轨高效等特点,充分发挥了化学推进高推力避开恶劣空间环境和电推进高比冲等特点,适用于小型高轨卫星的自主变轨,保障了小型高轨卫星高性价比设计和快速入轨任务的实现。
74.本发明所提供的小型高轨卫星的自主变轨方法,小型高轨卫星使用两台150n变轨推力器,两台(对角线两两一组,另一组备份)300mn电推力器和四台10n姿控推力器分三个阶段完成变轨任务。第一阶段变轨耗时5天,变轨结束后,关变轨化学推力器;第二阶段变轨耗时78天,变轨结束后,关电推力器;第三阶段变轨耗时15天,变轨结束后,关姿控化学推力器且切断变轨化学推力器工质流以保证定点后推进系统安全,总变轨耗时98天。
75.综上,上述实施例对小型高轨卫星的自主变轨方法的不同构型进行了详细说明,当然,本发明包括但不局限于上述实施中所列举的构型,任何在上述实施例提供的构型基础上进行变换的内容,均属于本发明所保护的范围。本领域技术人员可以根据上述实施例的内容举一反三。
76.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
77.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1