一种搭载并联机械臂飞行器
1.本实用新型涉飞行器技术领域,特别是涉及一种搭载并联机械臂飞行器。
背景技术:
2.到目前为止,工业和商业无人机市场一直专注于将无人机用于摄影和胶片拍摄,制图,测量,喷洒农药等,但是对于能够直接执行特定“动手”操作的无人机的需求日益增长。这些操作的示例包括使用其手臂抓住和搬运不同形状货物;附加或连接事物;切断电缆;控制开关;放下救生浮标;回收有害材料等。
3.目前国内的飞行机械臂类的应急救援装备研究较少,现有无人机虽然搭载了机械臂但其机械臂自由度较少,而且机械臂不能随意拆卸组装,不能够根据不同场景更换不同类型的机械手,还缺乏视觉系统,无法应用于远程救援情景。当前绝大多数的灾区救援方案都是无人机进行区域扫描及救援目标定位,再派遣搭载机械臂的无人车前往目标地点进行救援任务,过程相对缓慢需要空地相互协作才能完成,而即便是履带式无人车面对复杂的灾区地形行进也相对困难和缓慢。
技术实现要素:
4.实用新型目的:为了克服现有技术中存在的不足,本实用新型提供一种搭载并联机械臂飞行器。
5.技术方案:为实现上述目的,本实用新型的一种搭载并联机械臂飞行器,设有旋翼飞行器,旋翼飞行器下方设有并联机械臂组件,所述并联机械臂组件下方设有防抖动云台,所述防抖动云台内设有图像传感装置;所述旋翼飞行器圆周阵列设置有若干组的机臂组;所述并联机械臂组件内设有若干个舵机;所述防抖动云台内设有航向轴云台电机、俯仰轴云台电机、横滚轴云台电机,所述航向轴云台电机、俯仰轴云台电机、横滚轴云台电机内均设有加速度传感器。
6.进一步的,所述旋翼飞行器上设有机架,所述机臂组设有支撑件,所述支撑件固定于机架外侧上;所述支撑件固定连接有机臂,所述机臂尾端固定设有电机,电机轴端上设有旋翼。
7.进一步的,所述机架下方设有连接杆,连接杆下方设有固定板,所述防抖动云台设有固定架,所述固定架固定设置于固定板下方,所述航向轴云台电机固定于固定架内,所述航向轴云台电机轴端连接有l形连接臂,所述横滚轴云台电机固定于l形连接臂下方,所述横滚轴云台电机轴端连接有u形连接臂,所述俯仰轴云台电机固定设置于u形连接臂一侧,所述图像传感装置与俯仰轴云台电机的轴端相连接。
8.进一步的,所述并联机械臂组件还设有动平台,所述舵机等距离圆周阵列设置于固定板下方,所述舵机轴端连接有主动臂,所述主动臂下端两侧均设有万向节,所述万向节连接有从动臂,所述动平台分别与从动臂关节连接。
9.进一步的,所述机架内设有控制器组,控制器组内设有飞行控制器与机臂运动控
制器,所述动平台可连接不同类型的抓取机构。
10.进一步的,所述舵机可驱动动平台多角度自由移动,所述航向轴云台电机可驱动图像传感装置绕z轴旋转运动,所述横滚轴云台电机可驱动图像传感装置绕x轴旋转运动,所述俯仰轴云台电机可驱动图像传感装置绕y 轴旋转运动。
11.本实用新型的有益效果是:
12.1.本实用新型通过旋翼飞行器与并联机臂组件协作运行,机械臂有多个自有度的运动,通过机臂运动控制器控制调整各舵机的转动角度,可以在控制快并联机械臂快速灵活多自由度的运动,无人机与并联机械臂结合发挥空中优势以及并联机械臂的救灾功能,在发现目标后便可展开救援行动,加快救援进程,并且加入了图像传感装置,视觉辅助机械臂控制使救援任务更加高效。
13.2.本实用新型,通过可拆卸模块式设计,应对不同的应急救援任务动平台可以更换不同种类尺寸的机械手与抓取机构。
14.3.加入图像传感装置实现被救援目标追踪,通过防抖云台中加速度传感器采集数据计算控制防抖动云台内航向轴云台电机、俯仰轴云台电机、横滚轴云台电机的正反转方向与转动的量,使得图像传感装置可以防抖拍摄与精准定位的效果,辅助机械臂抓取等功能,大大提高救援效率并简化操纵难度。
附图说明
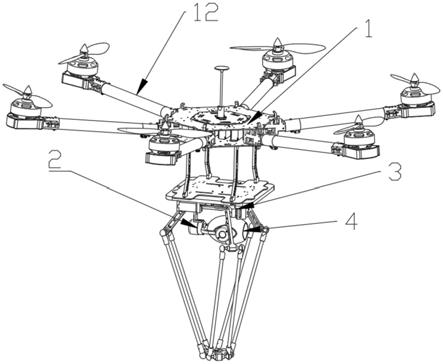
15.附图1为本实施例一种搭载并联机械臂飞行器的整体结构示意图;
16.附图2为本实施例一种搭载并联机械臂飞行器的旋翼飞行器结构示意图;
17.附图3为本实施例一种搭载并联机械臂飞行器的防抖动云台结构示意图;
18.附图4为本实施例一种搭载并联机械臂飞行器的并联机械臂组件结构示意图;
19.附图5为本实施例一种搭载并联机械臂飞行器的局部机构示意图;
具体实施方式
20.下面结合附图对本实用新型作更进一步的说明。
21.实施例,如图1至图5示,一种搭载并联机械臂飞行器,技术方案:为实现上述目的,本实用新型的一种搭载并联机械臂飞行器,设有旋翼飞行器1,旋翼飞行器1下方设有并联机械臂组件3,并联机械臂组件3下方设有防抖动云台2,防抖动云台2内设有图像传感装置4;旋翼飞行器1圆周阵列设置有若干组的机臂组12;并联机械臂组件3内设有若干个舵机30;防抖动云台2内设有航向轴云台电机21、俯仰轴云台电机22、横滚轴云台电机23,航向轴云台电机21、俯仰轴云台电机22、横滚轴云台电机23内均设有加速度传感器。
22.旋翼飞行器1上设有机架11,机臂组12设有支撑件13,支撑件13固定于机架11外侧上;支撑件13固定连接有机臂121,机臂121尾端固定设有电机14,电机14轴端上设有旋翼15。
23.机架11下方设有连接杆111,连接杆111下方设有固定板112,防抖动云台2设有固定架20,固定架20固定设置于固定板112下方,航向轴云台电机21固定于固定架20内,航向轴云台电机21轴端连接有l形连接臂201,横滚轴云台电机23固定于l形连接臂201下方,横滚轴云台电机23轴端连接有u形连接臂,俯仰轴云台电机22固定设置于u形连接臂一侧,图
像传感装置4与俯仰轴云台电机22的轴端相连接。
24.并联机械臂组件3还设有动平台36,舵机30等距离圆周阵列设置于固定板112下方,舵机30轴端连接有主动臂31,主动臂31下端两侧均设有万向节,万向节连接有从动臂32,动平台36分别与从动臂32关节连接。
25.机架11内设有控制器组,控制器组内设有飞行控制器与机臂运动控制器。
26.舵机30可驱动动平台36多角度自由移动,航向轴云台电机21可驱动图像传感装置4绕z轴旋转运动,横滚轴云台电机23可驱动图像传感装置 4绕x轴旋转运动,俯仰轴云台电机22可驱动图像传感装置4绕y轴旋转运动。
27.飞行控制器与防抖动云台2内各电机电性连接,飞行控制器与电机14 电性连接,飞行控制器与图像传感装置4电性连接,结合图像传感装置4 采集的图像数据计算,调整六个电机14的旋转方向与速度,从而控制飞行器位姿与位置,通过加速度传感器采集数据计算控制防抖动云台2内航向轴云台电机21、俯仰轴云台电机22、横滚轴云台电机23的正反转方向,与转动的量,从而使得图像传感装置4可以防抖拍摄与精准定位的效果。
28.机臂运动控制器与各个舵机30电性连接,可以控制调整各舵机的转动角度,可以在控制动平台36快速灵活多自由度运动。
29.动平台36可根据不同场景连接安装不同类型的抓取机构与机械手,适用性高。
30.以上仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1