一种用于海上无人巡检系统的无人机收放机构
1.本实用新型涉及无人机技术领域,具体涉及一种用于海上无人巡检系统的无人机收放机构。
背景技术:
2.随着海上工程作业区域逐渐从近海拓展到深远海,依靠人力完成日常巡检与维护任务的成本日益高涨,且恶劣的工作环境带来的安全问题层出不穷。水面无人艇配合无人机实现海空大范围智能巡检的无人巡检系统应运而生。
3.目前通用的无人机回收方案在海上巡检这一背景下,存在各种问题:如抗干扰能力差,在波浪运动中难以保证回收效率;点对点回收难度大,过分依赖无人机和无人平台的位姿控制能力;回收装置不可重复使用,过程不可逆,不符合巡检要求;经济性差,收放与固定过程中消耗较多能量,影响系统续航等。
技术实现要素:
4.本实用新型的目的是针对现有技术提出了一种利用固定翼无人机的起降特点和无人船的一些优势,实现无人机在船体上大范围的“点对面”类型回收的无人机收放机构。
5.具体的,一种用于海上无人巡检系统的无人机收放机构,其特征在于,所述无人机收放机构包括栖息网、弹性足和足端抓钩;
6.所述栖息网是底端与无人艇甲板相连的金属网;
7.所述弹性足与无人机相连,包括连接装置、拱形足段、平足段;所述连接装置与无人机连接,所述拱形足段设置在所述连接装置底部,由所述连接装置底部向下延伸;所述平足段水平设置,一端与所述拱形足段下端连接,另一端连接所述足端抓钩;
8.所述足端抓钩包括记忆金属钩和加热电阻丝;所述记忆金属钩一端与平足段连接,另一端在常温下呈钩型,受热形变后水平伸直;所述加热电阻丝设置在所述记忆金属钩上表面。
9.更进一步地,所述拱形足段和平足段上开设有多个减轻孔。
10.更进一步地,所述弹性足包括支撑杆,所述支撑杆两端分别连接所述拱形足段和平足段内侧中部。
11.更进一步地,所述弹性足包括走线槽,所述走线槽设置在所述拱形足段和平足段内侧。
12.更进一步地,所述足端抓钩包括保温薄膜,所述保温薄膜设置在所述记忆金属钩上表面,所述加热电阻丝内嵌在所述保温薄膜中。
13.更进一步地,所述栖息网的网孔呈中心对称的方形。
14.更进一步地,所述弹性足包括橡胶软垫,所述橡胶软垫为设置在所述平足段底部的两个半扁球形,所述两个橡胶软垫两端的尺寸与所述栖息网相邻两个网孔长度相同。
15.本实用新型的优点在于:
16.本实用新型利用固定翼无人机的起降特点和无人船的一些优势,实现了经济性好,稳定性高,对无人机的定位精度和位姿控制准确度要求低,回收效率高,适用于深远海复杂的自然环境。该设计可以用于无人机与各类海上母平台的连接中,如海洋牧场,海上风机巡检系统,钻井平台等。还可以拓展至军事领域,加装在无人机航母上,实现无人机群的自主重复收放。
17.本实用新型中的栖息网采用钢作为结构,一方面因为钢具有较高的刚度,在无人机载荷作用下不易发生变形,可以避免因网孔变形而导致抓钩无法脱离的情况,另一方面钢也具有较好的韧性,对无人机有一定的缓冲作用。网孔设计成正方形,使得弹性足在横向和纵向姿态下均能够卡紧栖息网。
18.本实用新型中的拱形足段采用拱形分段式设计,受力时能够将受力传递给各部分,避免局部受力过大而折断;平足段还可以作为减震机构,向上弯折,吸收碰撞的能量,保证对接的安全;为了防止反复的弯折导致平足与弹性足前半段接口处产生疲劳折断,上方还装有支撑杆保证强度。
19.本实用新型中的平足底端还加装了两个半扁球形的橡胶软垫,尺寸与间距根据网眼大小设计,能够自然卡入格栅,限制无人机的侧滑距离。同时软橡胶材质在侧滑碰撞过程中能够吸收碰撞能量,减震,保证机体安全。
20.本实用新型中的足端抓钩只有抓钩伸直阶段需要耗能加热,而维持钩紧状态或自由飞行阶段装置不需要耗能,经济性良好。且由于材料的形状记忆特性,抓钩的变形形状可以预先设定,栖息网上各处格栅或铁丝的交结点均能钩住,对无人机的定位精度要求小,降低控制系统难度。
附图说明
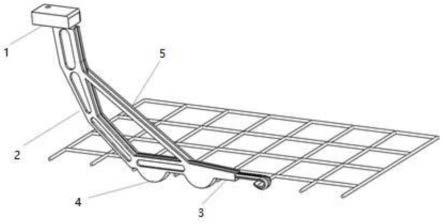
21.图1是本实用新型实施例提供的一种用于海上无人巡检系统的无人机收放机构的结构示意图;
22.图2是本实用新型实施例提供的一种用于海上无人巡检系统的无人机收放机构中足端抓钩的结构示意图。
23.其中:1-连接装置、2-拱形足段、3-平足段、4-支撑杆、5-橡胶软垫、6-记忆金属钩、7-保温薄膜、8-加热电阻丝。
具体实施方式
24.下面结合附图对本实用新型的技术方案进行更详细的说明,本实用新型包括但不仅限于下述实施例。
25.如附图1所示,本实用新型提出一种用于海上无人巡检系统的无人机收放机构,无人机收放机构包括栖息网、弹性足和足端抓钩。
26.其中,栖息网采用不锈钢钢丝编织而成,为了保证无人机以不同姿态降落时的着网成功率,栖息网网孔呈中心对称的方形。网孔的尺寸与弹性足设计匹配,保证四个弹性足在正放和斜放时均能够自然卡住。另外考虑到无人船由于不需要考虑人员活动空间,基本不存在上层建筑,甲板面积宽大,栖息网的面积可以做到足够大,网面所有区域都可以供无人机停靠,对定位精度要求较低,降低控制系统设计难度,保证收放成功率。网底端与船体
相连时,可以根据平台表面情况设计不同连接方式,如电磁铁,金属卡扣等。
27.弹性足包括连接装置1、拱形足段2、平足段3、支撑杆4和橡胶软垫5。连接装置1用于与无人机机体相连,可以根据无人机机型具体设计对接方式,如螺丝锁紧,或卡槽卡扣结构等。拱形足段2设置在连接装置1底部,由连接装置1底部向下延伸,拱形足段2采用拱形分段式设计,受力时能够将受力传递给各部分,避免局部受力过大而折断。平足段3水平设置与拱形足段2下端连接,伸出的平足段3与网体充分接触,稳定地支撑着机体。当船体在波浪中摇晃时,无人机与船体接触时难免存在夹角,产生碰撞,此时平足段3还可以作为减震机构,向上弯折,吸收碰撞的能量,保证对接的安全。为了防止反复的弯折导致平足与弹性足前半段接口处产生疲劳折断,上方还装有支撑杆4保证强度,支撑杆4两端分别连接拱形足段2和平足段3内侧中部。
28.另外,为了约束无人机在栖息网平面内的运动,防止滑落,平足底端还加装了两个半扁球形的橡胶软垫5,尺寸与间距根据网孔大小设计,两个橡胶软垫5两端距离使与相邻两个网孔尺寸相同,能够自然卡入网孔的格栅,限制无人机的侧滑距离。同时软橡胶材质在侧滑碰撞过程中能够吸收碰撞能量,减震,保证机体安全。拱形足段2和平足段3表面挖有减轻孔与走线槽,减轻足体质量,避免带来过大额外负重,提高无人机续航能力。
29.足端抓钩包括记忆金属钩6、保温薄膜7和加热电阻丝8。记忆金属钩6采用热变形双程形状记忆合金制成,一端与平足段3连接,另一端在常温下呈钩型,能够实现热控变形,在钩住与释放两种稳态之间变换。记忆金属钩6上表面覆盖有一层保温薄膜7,保温薄膜7内嵌一根加热电阻丝8,加热电阻丝8的导线经弹性足上走线槽与无人机控制系统相连。
30.当无人机做好降落准备时,加热电阻丝8通电发热,短时间内升温合金形变点,记忆金属钩6伸直,无人机降落。降落稳定后,加热电阻丝8断电,热量耗散,降温到形变点以下,记忆金属钩6又恢复弯曲,钩住栖息网铁丝或连接点,约束无人机在栖息网法线方向的运动,防止其在母船晃荡过程中被弹飞。起飞时,只需要再重复上述过程即可。整个收放过程中,只有记忆金属钩6伸直阶段需要耗能加热,而维持钩紧状态或自由飞行阶段装置不需要耗能,经济性良好。且由于材料的形状记忆特性,抓钩的变形形状可以预先设定,栖息网上各处格栅或铁丝的交结点均能钩住,对无人机的定位精度要求小,降低控制系统难度。
31.本实用新型不仅局限于上述具体实施方式,本领域一般技术人员根据实施例和附图公开内容,可以采用其它多种具体实施方式实施本实用新型,因此,凡是采用本实用新型的设计结构和思路,做一些简单的变换或更改的设计,都落入本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1