一种新型的无人机飞行精度测试装置的制作方法
1.本实用新型属于飞行精度测试技术领域,尤其涉及一种新型的无人机飞行精度测试装置。
背景技术:
2.无人驾驶飞机俗称:无人飞机、无人机、无人航空载具、无人作战飞机、蜂型机,广义上为不需要驾驶员登机驾驶的各式遥控飞行器,现有的无人机在研发过程中会通过飞行精度测试装置对飞行精度进行测试,从而确保无人机飞行的精度等数据,并实现多种多样的作业。
3.但是,现有的无人机飞行精度测试装置还存在着不便于配合该装置自动旋转与倾斜实现调节、不便于配合测试相机拆装使用和不便于对支撑处进行调节稳定的问题。
4.因此,发明一种新型的无人机飞行精度测试装置显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种新型的无人机飞行精度测试装置,以解决现有的无人机飞行精度测试装置不便于配合该装置自动旋转与倾斜实现调节、不便于配合测试相机拆装使用和不便于对支撑处进行调节稳定的问题。
6.一种新型的无人机飞行精度测试装置,包括支撑板,移动座,移动轮,支撑稳定架结构,螺纹筒,定位螺杆,工业相机,转动头,伸缩柱,安装座,第一电机,第一齿轮,拆装角度调节座结构,控制器和驱动开关,所述的支撑板下端的四周分别螺栓安装有移动座,且移动座内部轴接有移动轮;所述的支撑稳定架结构分别安装在支撑板左右两端的前后两部;所述的螺纹筒螺栓安装在支撑板上端的中间部位;所述的定位螺杆螺纹连接在螺纹筒内部上方的前侧;所述的工业相机放置在拆装角度调节座结构内;所述的转动头分别焊接在定位螺杆左右两端的前部;所述的伸缩柱插入在螺纹筒的内部上方;所述的安装座螺栓安装在伸缩柱的右端;所述的第一电机螺栓安装在安装座的内部,同时第一电机的输出轴上镶嵌有第一齿轮;所述的拆装角度调节座结构安装在伸缩柱的上端;所述的控制器螺栓安装在支撑板上端的右侧,同时控制器的前端镶嵌有驱动开关;所述的拆装角度调节座结构包括转动台,转动柱,第二齿轮,第二电机,减速器,竖侧板和放置盒座结构,所述的转动台下端的中间部位焊接有转动柱,同时转动柱通过轴承安装在伸缩柱的上端;所述的第二齿轮镶嵌在转动柱的外壁上;所述的第二电机螺栓安装在减速器的下端;所述的减速器螺栓安装在竖侧板外表面的上部,同时减速器设置在转动台的上部前侧;所述的放置盒座结构前后两端分别安装有竖侧板。
7.优选的,所述的放置盒座结构包括置放座,套接座,连接轴,夹紧螺杆,手动横杆和夹装板,所述的套接座分别焊接在置放座的前后两端;所述的连接轴插入在套接座内;所述的夹紧螺杆分别螺纹连接在置放座内部左右两侧的前后两部;所述的夹紧螺杆一端螺栓安装有手动横杆,另一端活动镶嵌有夹装板。
8.优选的,所述的支撑稳定架结构包括固定板,加固板,调节杆,角度调节头结构,固定盘,固定锥和转动盘,所述的固定板分别焊接在支撑板左右两端的前后两部;所述的加固板分别焊接在固定板和支撑板之间的前后两侧;所述的调节杆螺纹连接在固定板的内部中间部位,同时调节杆的上端螺栓安装有转动盘;所述的角度调节头结构安装在调节杆和固定盘之间;所述的固定锥焊接在固定盘的下端。
9.优选的,所述的角度调节头结构包括上连接座,活动腔,第一支撑轴承,下连接座,组装轴和第二支撑轴承,所述的上连接座外壁的上部镶嵌有第一支撑轴承;所述的活动腔开设在上连接座的下部中间部位;所述的第一支撑轴承镶嵌在调节杆内部的下侧;所述的下连接座插入在活动腔的内部;所述的组装轴镶嵌在下连接座和上连接座的内部;所述的第二支撑轴承镶嵌在下连接座的外壁下部,同时第二支撑轴承外侧镶嵌在固定盘的内部上方中间部位。
10.优选的,所述的竖侧板设置有两个,所述的转动台后部的竖侧板内通过轴承安装有连接轴。
11.优选的,所述的减速器后端键连接有连接轴,同时减速器与第二电机的输出轴键连接。
12.优选的,所述的转动台与转动柱组装呈t型,同时转动柱外壁上的第二齿轮与第一齿轮啮合。
13.优选的,所述的连接轴设置有两个,同时分别活动支撑住置放座,所述的连接轴内部上方与套接座内部上方螺纹连接有螺栓固定。
14.优选的,所述的套接座设置有多个,所述的套接座设置为倒u型。
15.优选的,所述的置放座内部放置有工业相机,同时工业相机前后表面分别通过夹装板夹装固定住。
16.优选的,所述的调节杆通过固定板活动支撑在支撑板的四角处,所述的调节杆与转动盘组装呈t型。
17.优选的,所述的固定盘下端的固定锥设置有多个,所述的固定锥采用钢锥。
18.优选的,所述的上连接座配合第一支撑轴承与调节杆活动连接。
19.优选的,所述的下连接座配合第二支撑轴承与固定盘活动连接。
20.优选的,所述的上连接座和下连接座之间通过组装轴活动连接。
21.与现有技术相比,本实用新型的有益效果为:
22.1. 本实用新型中,所述的转动台、转动柱、第二齿轮、第一齿轮和第一电机的设置,能够方便操作的实现角度的转动,从而配合无人机飞行进行拍摄测试。
23.2.本实用新型中,所述的第二电机、减速器、竖侧板和连接轴的设置,能够配合置放座实现不同角度的倾斜使用。
24.3. 本实用新型中,所述的套接座和连接轴的设置,能够调节该套接座角度倾斜处的位置,同时配合套接座实现左右移动调节的工作。
25.4. 本实用新型中,所述的置放座和夹装板的设置,便于配合工业相机实现安装固定或者拆卸收纳。
26.5. 本实用新型中,所述的夹紧螺杆和手动横杆的设置,方便的配合工作人员操作夹装板活动对工业相机实现固定使用。
27.6. 本实用新型中,所述的固定板和加固板的设置,在配合调节杆支撑的同时实现活动使用。
28.7. 本实用新型中,所述的调节杆和转动盘的设置,在固定好之后,能够增加支撑板的稳定性进行工作。
29.8. 本实用新型中,所述的固定盘和固定锥的设置,便于插入到地下实现固定防滑使用。
30.9. 本实用新型中,所述的上连接座、第一支撑轴承,下连接座和第二支撑轴承的设置,在固定盘与固定锥插入到指定位置处之后,配合调节杆转动使用。
31.10.本实用新型中,所述的活动腔和组装轴的设置,能够带动固定盘倾斜到达不同的角度使用。
附图说明
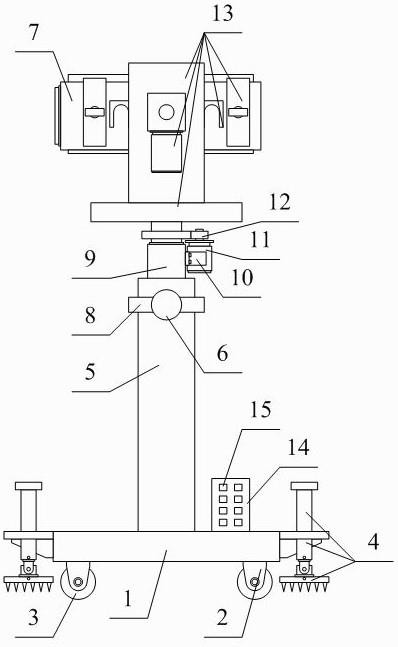
32.图1是本实用新型的结构示意图。
33.图2是本实用新型的拆装角度调节座结构的结构示意图。
34.图3是本实用新型的放置盒座结构的结构示意图。
35.图4是本实用新型的支撑稳定架结构的结构示意图。
36.图5是本实用新型的角度调节头结构的结构示意图。
37.图6是本实用新型的电气接线示意图。
38.图中:
39.1、支撑板;2、移动座;3、移动轮;4、支撑稳定架结构;41、固定板;42、加固板;43、调节杆;44、角度调节头结构;441、上连接座;442、活动腔;443、第一支撑轴承;444、下连接座;445、组装轴;446、第二支撑轴承;45、固定盘;46、固定锥;47、转动盘;5、螺纹筒;6、定位螺杆;7、工业相机;8、转动头;9、伸缩柱;10、安装座;11、第一电机;12、第一齿轮;13、拆装角度调节座结构;131、转动台;132、转动柱;133、第二齿轮;134、第二电机;135、减速器;136、竖侧板;137、放置盒座结构;1371、置放座;1372、套接座;1373、连接轴;1374、夹紧螺杆;1375、手动横杆;1376、夹装板;14、控制器;15、驱动开关。
具体实施方式
40.以下结合附图对本实用新型做进一步描述:
41.实施例:
42.如附图1所示,一种新型的无人机飞行精度测试装置,包括支撑板1,移动座2,移动轮3,支撑稳定架结构4,螺纹筒5,定位螺杆6,工业相机7,转动头8,伸缩柱9,安装座10,第一电机11,第一齿轮12,拆装角度调节座结构13,控制器14和驱动开关15,所述的支撑板1下端的四周分别螺栓安装有移动座2,且移动座2内部轴接有移动轮3;推动支撑板1通过移动座2内部的移动轮3实现移动使用;所述的支撑稳定架结构4分别安装在支撑板1左右两端的前后两部;所述的螺纹筒5螺栓安装在支撑板1上端的中间部位;所述的定位螺杆6螺纹连接在螺纹筒5内部上方的前侧;所述的工业相机7放置在拆装角度调节座结构13内;所述的转动头8分别焊接在定位螺杆6左右两端的前部;所述的伸缩柱9插入在螺纹筒5的内部上方;伸缩柱9升降配合螺纹筒5到达合适的高度处,之后转动该转动头8配合定位螺杆6固定住伸缩
柱9;所述的安装座10螺栓安装在伸缩柱9的右端;所述的第一电机11螺栓安装在安装座10的内部,同时第一电机11的输出轴上镶嵌有第一齿轮12;第一电机11工作带动第一齿轮12旋转使用;所述的拆装角度调节座结构13安装在伸缩柱9的上端;所述的控制器14螺栓安装在支撑板1上端的右侧,同时控制器14的前端镶嵌有驱动开关15。
43.如附图2所示,上述实施例中,具体的,所述的拆装角度调节座结构13包括转动台131,转动柱132,第二齿轮133,第二电机134,减速器135,竖侧板136和放置盒座结构137,所述的转动台131下端的中间部位焊接有转动柱132,同时转动柱132通过轴承安装在伸缩柱9的上端;所述的第二齿轮133镶嵌在转动柱132的外壁上;旋转的第一齿轮12与第二齿轮133接触并带动转动台131与转动柱132到达合适的角度;所述的第二电机134螺栓安装在减速器135的下端;所述的减速器135螺栓安装在竖侧板136外表面的上部,同时减速器135设置在转动台131的上部前侧;第二电机134启动配合减速器135带动放置盒座结构137工作;所述的放置盒座结构137前后两端分别安装有竖侧板136。
44.如附图3所示,上述实施例中,具体的,所述的放置盒座结构137包括置放座1371,套接座1372,连接轴1373,夹紧螺杆1374,手动横杆1375和夹装板1376,所述的套接座1372分别焊接在置放座1371的前后两端,调节时左右移动置放座1371使不同位置处的套接座1372套在连接轴1373上,之后拧紧其螺栓固定住;所述的连接轴1373插入在套接座1372内;工作中的减速器135配合连接轴1373带动置放座1371进行角度的调节;所述的夹紧螺杆1374分别螺纹连接在置放座1371内部左右两侧的前后两部;所述的夹紧螺杆1374一端螺栓安装有手动横杆1375,另一端活动镶嵌有夹装板1376;置放座1371内放置工业相机7,然后转动手动横杆1375配合夹紧螺杆1374活动并带动夹装板1376移动实现对工业相机7的夹装固定。
45.如附图4所示,上述实施例中,具体的,所述的支撑稳定架结构4包括固定板41,加固板42,调节杆43,角度调节头结构44,固定盘45,固定锥46和转动盘47,所述的固定板41分别焊接在支撑板1左右两端的前后两部;所述的加固板42分别焊接在固定板41和支撑板1之间的前后两侧;所述的调节杆43螺纹连接在固定板41的内部中间部位,同时调节杆43的上端螺栓安装有转动盘47;所述的角度调节头结构44安装在调节杆43和固定盘45之间;使固定盘45下端的固定锥46插入到地面中固定;所述的固定锥46焊接在固定盘45的下端;手动旋转的转动盘47配合调节杆43在固定板41内旋转调节。
46.如附图5所示,上述实施例中,具体的,所述的角度调节头结构44包括上连接座441,活动腔442,第一支撑轴承443,下连接座444,组装轴445和第二支撑轴承446,所述的上连接座441外壁的上部镶嵌有第一支撑轴承443;所述的活动腔442开设在上连接座441的下部中间部位;所述的第一支撑轴承443镶嵌在调节杆43内部的下侧;上连接座441能够通过第一支撑轴承443在调节杆43转动;所述的下连接座444插入在活动腔442的内部;所述的组装轴445镶嵌在下连接座444和上连接座441的内部;下连接座444配合组装轴445在活动腔442内活动倾斜;所述的第二支撑轴承446镶嵌在下连接座444的外壁下部,同时第二支撑轴承446外侧镶嵌在固定盘45的内部上方中间部位;下连接座444能够通过第二支撑轴承446在固定盘45内旋转。
47.上述实施例中,具体的,所述的第一电机11采用型号为5ik型电机。
48.上述实施例中,具体的,所述的控制器14采用型号为fx2n
‑
48型的plc。
49.上述实施例中,具体的,所述的第二电机134采用型号为ik型电机。
50.上述实施例中,具体的,所述的驱动开关15与控制器14电性连接,所述的第一电机11与控制器14电性连接,所述的第二电机134与控制器14电性连接。
51.工作原理
52.本实用新型的工作原理:推动支撑板1通过移动轮3移动到达合适的位置处到达指定的位置处后转动转动盘47配合调节杆43带动固定盘45和固定锥46下降,到达合适的位置处后活动固定盘45配合上连接座441、第一支撑轴承443、下连接座444和第二支撑轴承446调节从而将固定锥46插入到合适的位置处进行固定,安装固定好后再次转动转动盘47使调节杆43旋转调节支撑板1的稳定性,完成调节之后提起转动台131使伸缩柱9与螺纹筒5到达合适的长度,之后转动转动头8配合定位螺杆6固定住伸缩柱9,在使用过程中使工业相机7通过图像处理器与计算机连接,之后使工业相机7对无人机进行精确拍摄时间飞行精度测试的工作,在使用的同时驱动第一电机11配合第一齿轮12带动转动柱132、第二齿轮133、转动台131、置放座1371和工业相机7旋转到达合适的位置处,之后驱动第二电机134配合减速器135带动置放座1371和工业相机7到达合适的角度,从而使工业相机7呈不同的角度和方向进行使用工作。
53.利用本实用新型所述的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1