一种基于无人车平台发射无人机蜂群的装置的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种基于无人车平台发射无人机蜂群的装置。
背景技术:
2.多架无人机在形成编队后,飞往目的地的同时,会受到各种气流影响,这些影响来源于自然的天气状况,更多的是来自编队中无人机自身的涡流影响,此时在各种因素的影响下,无人机编队队形会发生各种各样的变化,为了使无人机能够更加适应自身所在环境,面对不同环境的影响下依然可以保持良好的编队队形,就需要引入编队保持机制,始终保持编队队形的稳定性。但现有的无人机蜂群发射平台,在发射前需要调整好发射角度,但现有的技术不能对发射平台的角度进行调节,对发射起到了一定的阻碍。
技术实现要素:
3.有鉴于此,本实用新型提供一种基于无人车平台发射无人机蜂群的装置,以解决上述技术问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种基于无人车平台发射无人机蜂群的装置,包括:
6.无人车平台;
7.底板,所述底板安装在所述无人车平台上;
8.支撑板,所述支撑板设置在所述底板的一对导向架上,且所述支撑板通过所述底板上的气缸控制驱动;
9.其中,所述支撑板上设有一调节机构,所述调节机构包括电动推杆、铰接杆、调节板和缓冲组件,所述电动推杆铰接在所述支撑板的上端,所述调节板铰接在所述支撑板的右端,所述铰接杆与所述调节板的下端固接,且所述铰接杆与所述电动推杆的输出端铰接,所述缓冲组件设置在所述支撑板的安装槽内,且所述缓冲组件的上端与所述铰接杆的下端铰接。
10.进一步地,所述缓冲组件包括筒体、活塞杆和活塞,所述筒体设置在所述安装槽内,所述活塞与所述筒体的内壁滑动连接,所述活塞杆与所述活塞固接。
11.更进一步地,所述活塞杆的上端穿设所述筒体的筒盖向上伸出,且所述活塞杆的上端与所述铰接杆的下端铰接。
12.更进一步地,所述筒体内设有一对缓冲弹簧,一对缓冲弹簧的两端分别抵压在所述活塞与所述筒体的内底壁之间。
13.更进一步地,所述铰接杆内嵌设有一连接板,所述连接板与所述电动推杆的输出端铰接。
14.更进一步地,所述调节板上安装有一发射箱。
15.进一步地,一对导向架分别活动设置在所述底板对应的导柱上,所述导柱套设有
一压缩弹簧,所述压缩弹簧的两端分别抵压在所述导向架与所述导柱之间。
16.从上述的技术方案可以看出,本实用新型的优点是:本实用新型能够在发射前对发射平台的角度进行调整,使得无人机蜂群发射时的定位更加精准。
附图说明
17.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
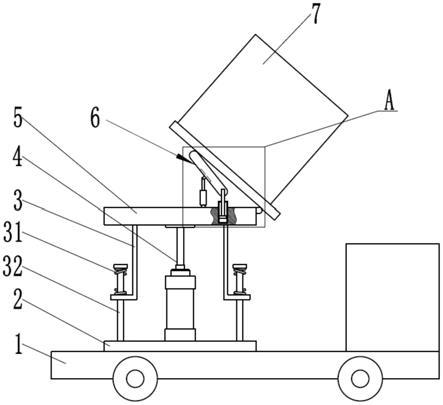
18.图1为本实用新型的结构示意图。
19.图2为图1的a处局部放大图。
20.图3为图2的b处局部放大图。
21.图4为本实用新型的无人机蜂群的立体结构示意图。
22.图5为本实用新型的无人机蜂群的正视图。
23.图6为本实用新型的无人机蜂群未展开式的立体结构示意图。
24.附图标记列表:无人车平台1、底板2、导向架3、压缩弹簧31、导柱32、气缸4、支撑板5、安装槽51、调节机构6、电动推杆61、铰接杆62、连接板63、调节板64、筒体65、筒盖651、活塞杆66、活塞67、缓冲弹簧68、发射箱7、圆柱型顶体10、飞控系统20、电调21、飞行桨叶22、gps模块30、驱动电机40、快拆机构50、微型摄像头60、智能电池70。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本实用新型做进一步详细说明。在此,本实用新型的示意性实施方式及其说明用于解释本实用新型,但并不作为对本实用新型的限定。
26.参考图1至图6,如图1和图2所示的一种基于无人车平台发射无人机蜂群的装置,该装置由无人车平台1、底板2和支撑板5所组成,所述底板2安装在所述无人车平台1上;所述支撑板5设置在所述底板2的一对导向架3上,且所述支撑板5通过所述底板2上的气缸4控制驱动;其中,所述支撑板5上设有一调节机构6,所述调节机构6包括电动推杆61、铰接杆62、调节板64和缓冲组件,所述电动推杆61铰接在所述支撑板5的上端,所述调节板64铰接在所述支撑板5的右端,所述铰接杆62与所述调节板64的下端固接,且所述铰接杆62与所述电动推杆61的输出端铰接,所述缓冲组件设置在所述支撑板5的安装槽51内,且所述缓冲组件的上端与所述铰接杆62的下端铰接。
27.优选的,所述缓冲组件包括筒体65、活塞杆66和活塞67,所述筒体65设置在所述安装槽51内,所述活塞67与所述筒体65的内壁滑动连接,所述活塞杆66与所述活塞67固接。
28.优选的,所述活塞杆66的上端穿设所述筒体65的筒盖651向上伸出,且所述活塞杆66的上端与所述铰接杆62的下端铰接。
29.如图3所示,所述筒体65内设有一对缓冲弹簧68,一对缓冲弹簧68的两端分别抵压在所述活塞67与所述筒体65的内底壁之间。设置以上结构,当活塞67下移时,使缓冲弹簧68被压缩,在对调节板64的整个调节过程中起到了良好的缓冲效果。
30.优选的,所述铰接杆63内嵌设有一连接板63,所述连接板63与所述电动推杆61的输出端铰接。
31.优选的,所述调节板64上安装有一发射箱7。
32.优选的,一对导向架3分别活动设置在所述底板2对应的导柱32上,所述导柱32套设有一压缩弹簧31,所述压缩弹簧31的两端分别抵压在所述导向架3与所述导柱32之间。
33.工作原理:如图4、图5和图6所示,在飞机进行手抛或在母机上进行抛投时,通过遥控启动智能电池70开关,使驱动电机40进行工作,将飞行系统20上的若干个飞行桨叶22快速展开,并通过快拆结构50将若干个飞行桨叶22卡死防止飞行中的晃动及共振,并通过调节电调21使飞行桨叶22的方位确定,同时飞控系统通过圆柱型顶体10内的gps模块30定位、飞行算法计算等实现将子机在空中保持稳定的飞行姿态,继而可通过飞手对子机实现控制,飞抵任务区,通过微型摄像头60可以进行拍摄;在发射前,先控制气缸4的输出端上移,使得支撑板5上移,移动到指定高度后停止上移,在上移的过程中,导向架3对压缩弹簧31进行挤压,使得压缩弹簧31被压缩,在支撑板5的移动过程中起到了良好的缓冲性,此时控制电动推杆61,带动铰接杆62移动,并带动调节板64转动,从而对发射箱7的角度进行调整,铰接杆62移动时带动下端的活塞杆66移动,使得活塞67下移,使缓冲弹簧68被压缩,在对调节板64的整个调节过程中起到了良好的缓冲效果;综上所述,本实用新型能够在发射前对发射平台的角度进行调整,使得无人机蜂群发射时的定位更加精准。
34.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型实施例可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1