一种小型共轴双旋翼无人机迂回传动及同转速系统
1.本实用新型涉及航空器设计技术领域,更具体的说是涉及一种小型共轴双旋翼无人机迂回传动及同转速系统。
背景技术:
2.共轴式直升机采用共轴反转的上下两副旋翼提供升力,通过改变上下两副旋翼平衡的反扭矩实现航向操纵,不需尾桨,具有体积小、结构紧凑、悬停效率高的优点。共轴双旋翼直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡。由于没有尾桨,共轴式直升机的机身部分一般情况下均在桨盘面积之内,其机体总的纵向尺寸就是桨盘直径。这样,在桨盘载荷、发动机和相同的总重下,共轴双旋翼直升机的总体纵向尺寸仅为单旋翼直升机的60%左右。
3.俄罗斯卡莫夫设计局研制并生产了一系列有人驾驶共轴式直升机,在国民经济和军事领域广泛应用。在国内,北航于上世纪80年代自主研发了共轴式无人直升机,成功实现了自主导航飞行,并开始在不同领域应用。随着无人机的能源动力大量采用了锂电池电机驱动,北航直升机研究所也研制成功了50公斤级电动共轴式无人直升机。
4.现有技术中,常规的等转速方案是指上下旋翼通过齿轮换向并通过齿轮保持相同的减速比。一般来说,共轴式直升机的上旋翼轴和下旋翼轴都是通过内外轴以实现共轴反转。上下旋翼的内外轴又是通过主减速器内的圆锥齿轮实现换向运动的。因此,主减速器既是动力传递减速装置又是上下旋翼的换向装置。而这种方案采用的换向和同转速装置是通过锥齿轮实现的,锥齿轮重量较大,不利于小型共轴双旋翼无人机的轻量化设计。
5.因此,如何提供一种小型共轴双旋翼无人机迂回传动及同转速系统是本领域技术人员亟需解决的问题。
技术实现要素:
6.有鉴于此,本实用新型提供了一种小型共轴双旋翼无人机迂回传动及同转速系统,能够至少解决上述技术问题之一。
7.为了实现上述目的,本实用新型采用如下技术方案:
8.一种小型共轴双旋翼无人机迂回传动及同转速系统,包括上减速机构和下减速机构;所述上减速机构包括:纵向倒置电机、上同心轴、旋翼外轴、上齿轮、上一级减速传动系统和上二级减速传动系统;所述上一级减速传动系统与所述上二级减速传动系统呈纵向部分重叠布置;所述上一级减速传动系统包括:上一级减速输出带轮、上一级减速皮带、上一级减速从动带轮;所述上二级减速传动系统包括:上二级减速主动轮、上二级减速皮带和上二级减速从动轮;所述纵向倒置电机的输出轴与所述上一级减速输出带轮同心固定连接,所述上一级减速皮带同时与所述上一级减速输出带轮和所述上一级减速从动带轮啮合,且拉紧;所述上同心轴转动安装于机身上,所述上一级减速从动带轮、所述上二级减速主动轮和所述上齿轮固定安装于所述上同心轴上;所述上二级减速皮带同时与所述上二级减速主
动轮和所述上二级减速从动轮啮合,且拉紧;所述上二级减速从动轮与所述旋翼外轴固定连接;所述下减速机构包括:纵向正置电机、下同心轴、旋翼内轴、下齿轮、下一级减速传动系统和下二级减速传动系统;所述下一级减速传动系统与所述下二级减速传动系统呈纵向部分重叠布置;所述下一级减速传动系统包括:下一级减速输出带轮、下一级减速皮带、下一级减速从动带轮;所述下二级减速传动系统包括:下二级减速主动轮、下二级减速皮带和下二级减速从动轮;
9.所述纵向正置电机的输出轴与所述下一级减速输出带轮同心固定连接;所述下一级减速皮带同时与所述下一级减速输出带轮和所述下一级减速从动带轮啮合,且拉紧;所述下同心轴转动安装于机身上,所述下一级减速从动带轮、所述下二级减速主动轮和所述下齿轮均固定于所述下同心轴上;所述上齿轮和所述下齿轮相啮合;所述下二级减速皮带同时与所述下二级减速主动轮和所述下二级减速从动轮啮合,且拉紧;所述下二级减速从动轮与所述旋翼内轴固定连接。
10.本实用新型提供的小型共轴双旋翼无人机迂回传动及同转速系统,皮带传动具有传动平稳、缓冲吸震、结构简单、使用维护方便等优点,具有良好的挠性和弹性;在满足高传动比的情况下,能够实现传动系统固定轻便、紧凑、可靠。
11.优选的,所述上齿轮和下齿轮均为尼龙齿轮且尺寸相同。
12.采取上述技术方案的有益效果是,尼龙齿轮重量轻、耐疲劳、吸收冲击、自润滑性好。
13.优选的,所述上齿轮和所述下齿轮均通过螺钉分别与所述上同心轴和所述下同心轴固定连接。
14.采取上述技术方案的有益效果是,通过螺钉固定连接,结构稳定,工艺简单。
15.优选的,上旋翼与所述旋翼内轴固定连接,下旋翼与所述旋翼外轴固定连接。
16.采取上述技术方案的有益效果是,通过控制旋翼外轴和旋翼内轴的转速即可达到控制旋翼速度。
17.优选的,所述旋翼内轴与所述旋翼外轴通过轴内轴承同心装配。
18.采取上述技术方案的有益效果是,能够保证旋翼内轴和旋翼外轴同心。
19.优选的,所述下二级减速从动轮与所述上二级减速从动轮的轮廓中心在纵向重合。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
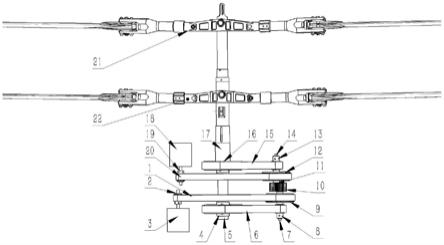
21.图1附图为本实用新型的结构示意图;
22.图2为图1的局部放大图;
23.图3为本实用新型中上减速机构的结构示意图;
24.图4为本实用新型中下减速机构的结构示意图。
25.其中,各附图标记为:
26.1-下一级减速皮带,2-下一级减速输出带轮,3-纵向正置电机, 4-下二级减速从动带轮,5-旋翼内轴,6-下二级减速皮带,7-下同心轴,8-下二级减速主动轮,9-下一级减速从动带轮,10-下齿轮,11
‑ꢀ
上齿轮,12-上一级减速从动带轮,13-上二级减速主动轮,14-上同心轴,15-上二级减速皮带,16-上二级减速从动轮,17-旋翼外轴,18
‑ꢀ
纵向倒置电机,19-上一级减速输出带轮,20-上一级减速皮带,21
‑ꢀ
上旋翼,22-下旋翼。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.本实用新型实施例公开了一种小型共轴双旋翼无人机迂回传动及同转速系统,包括上减速机构和下减速机构;上减速机构包括:纵向倒置电机18、上同心轴14、旋翼外轴17、上齿轮11、上一级减速传动系统和上二级减速传动系统;上一级减速传动系统与上二级减速传动系统呈纵向部分重叠布置;上一级减速传动系统包括:上一级减速输出带轮19、上一级减速皮带20、上一级减速从动带轮12;上二级减速传动系统包括:上二级减速主动轮13、上二级减速皮带15和上二级减速从动轮16;纵向倒置电机18的输出轴与上一级减速输出带轮19同心固定连接,上一级减速皮带20同时与上一级减速输出带轮19和上一级减速从动带轮12啮合,且拉紧;上同心轴14转动安装于机身上,上一级减速从动带轮12、上二级减速主动轮13和上齿轮11固定安装于上同心轴14上;上二级减速皮带15同时与上二级减速主动轮13和上二级减速从动轮16啮合,且拉紧;上二级减速从动轮16与旋翼外轴17固定连接;下减速机构包括:纵向正置电机3、下同心轴7、旋翼内轴5、下齿轮10、下一级减速传动系统和下二级减速传动系统;下一级减速传动系统与下二级减速传动系统呈纵向部分重叠布置;下一级减速传动系统包括:下一级减速输出带轮2、下一级减速皮带1、下一级减速从动带轮9;下二级减速传动系统包括:下二级减速主动轮8、下二级减速皮带6和下二级减速从动轮4;纵向正置电机3的输出轴与下一级减速输出带轮2同心固定连接;下一级减速皮带1同时与下一级减速输出带轮2和下一级减速从动带轮9 啮合,且拉紧;下同心轴7转动安装于机身上,下一级减速从动带轮 9、下二级减速主动轮8和下齿轮10均固定于下同心轴上;上齿轮 11和下齿轮10相啮合;下二级减速皮带6同时与下二级减速主动轮 8和下二级减速从动轮4啮合,且拉紧;下二级减速从动轮4与旋翼内轴5固定连接。
29.上齿轮11和下齿轮10均为尼龙齿轮且尺寸相同。
30.上齿轮11和下齿轮10均通过螺钉分别与上同心轴14和下同心轴7固定连接。
31.上旋翼21与旋翼内轴5固定连接,下旋翼22与旋翼外轴17固定连接。旋翼内轴5与旋翼外轴17通过轴内轴承同心装配。
32.下二级减速从动轮4与上二级减速从动轮16的轮廓中心在纵向重合。
33.本实用新型公开的一种小型共轴双旋翼无人机迂回传动及同转速系统的工作过程为:控制系统控制纵向倒置电机18工作,带动上一级减速输出带轮19转动,由于上一级减速皮带20同时与上一级减速输出带轮19和上一级减速从动带轮12啮合,从而带动上一级减速从动带轮12转动,进而带动上二级减速主动轮13和上齿轮11转动;上二级减速从动轮16
转动;旋翼外轴17转动,下旋翼22转动;同理,纵向正置电机3带动上旋翼21转动,由于上齿轮11与下齿轮 10啮合,可达到小型共轴双旋翼无人机上下旋翼无人机上下旋翼同转速的控制。
34.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
35.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1