一种基于双涵道动力系统的轻小型无人机
1.本实用新型涉及无人飞行器技术领域,具体一种基于双涵道动力系统的轻小型无人机。
背景技术:
2.近年来无人机因其鲜明的技术特点在军事和民用领域都获得了广泛应用和飞速发展,尤其在军事侦察、反恐、公安、消防、森林巡查、核泄漏探测以及救灾等领域具有广泛的需求。
3.无人机的功能越来越强大的同时,其续航能力就显得更加重要,影响小型电动无人机续航能力的因素有很多,包括无人机的自身重量、飞行速度、飞行状态、环境温度、电池参数等,但目前现有的电动无人机普遍续航较短。此外,在复杂的城市环境下,还需要保证无人机可以快速,安全地改变自身姿态,并且减少对人们日常生活的影响。所以随着许多领域对无人机系统需求的增加,而现有的无人机难以满足实际的应用要求,因此开展新型无人机的研究是有必要的。
4.涵道无人机相比旋翼无人机来说,其结构更加紧凑,前飞时飞行阻力小,飞行姿态更接近于固定翼飞机,另外,由于螺旋桨被涵道环扩,无人机气动噪声的传播受到了涵道壁的阻挡,使得其噪音低,隐蔽性好并且不易影响到其他人员和设备,利于在城市中执行任务。
技术实现要素:
5.本实用新型的目的在于提供一种基于双涵道动力系统的轻小型无人机,以解决现有无人机续航时间短,噪音大,作业危险的问题。
6.为实现上述目的,本实用新型采用的技术方案是:
7.一种基于双涵道动力系统的轻小型无人机,包括机身、起落架结构、旋转机构、双涵道式动力飞行器、涵道倾转机构,所述机身底部固定连接起落架结构,所述机身左右两侧安装旋转机构、双涵道式动力飞行器和涵道倾转机构,所述双涵道式动力飞行器与旋转机构相连,涵道倾转机构与双涵道式动力飞行器相连,所述两个双涵道式动力飞行器左右对称,能够在涵道倾转机构控制下通过旋转机构相对机身独立进行前后倾转,从而实现无人机的前飞、后飞、左侧飞行、右侧飞行及转弯和调整气流的功能。
8.优选地,所述的机身包括连接杆和固定板,连接杆连接左右两侧机身,固定板连接起落架结构。
9.优选地,所述的起落架结构包括固定架、缓冲架、着地架,固定架与固定板连接,缓冲架与固定架之间设置为135
°
夹角,着地架前端设置仰角45
°
。
10.优选地,所述的旋转机构为两个独立轴承,并且分别与两个双涵道式动力飞行器的支撑架相连。
11.优选地,所述的双涵道式动力飞行器包括外涵道、支撑涵道动力飞行器的支撑架、
驱动电机、旋叶片机构,驱动电机和旋叶片机构都安装在支撑架上。
12.优选地,所述的旋叶片机构为三叶旋叶片。
13.优选地,所述的涵道倾转机构是四杆机构,包括底座、摇杆、两个连杆,底座对称固定在机身两侧,摇杆通过铰链与底座相连,摇杆与两个连杆通过球铰链连接且成对称分布,两个摇杆分别与底座相连提供倾转力,两个连杆的另一端通过球铰链与双涵道式动力飞行器连接。
14.本发明所述的舵机和涵道电机作为无人机的动力源,减少了无人机功耗和机体质量,从而增加了无人机的续航。
15.本实用新型具有以下有益效果:
16.通过控制电机带动扇叶在涵道中旋转产生推力使得无人机可以垂直升降,通过控制舵机运动带动涵道倾斜使得无人机可以改变自身的姿态和运动。两个涵道对称布置,使用两个舵机通过连杆控制涵道倾斜角度,实现高精度姿态控制。同时涵道的动力系统和控制系统完全独立,克服了无人机飞行控制中的耦合问题,减少了算法复杂度的同时提高了无人机飞行的可靠性和稳定性。
附图说明
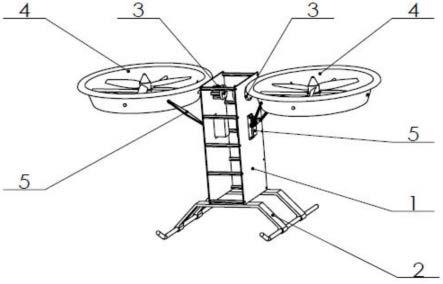
17.图1为本实用新型优选实施例基于双涵道动力系统的轻小型无人机的总体结构图。
18.图2为本实用新型优选实施例双涵道式动力飞行器结构示意图。
19.图3为本实用新型优选实施例涵道倾转机构的结构示意图。
20.图4为本实用新型优选实施例旋转机构的结构示意图。
具体实施方式
21.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例一:
23.如图1所示,一种基于双涵道动力系统的轻小型无人机,包括机身1、起落架结构2、旋转机构3、双涵道式动力飞行器4、涵道倾转机构5,所述机身1底部固定连接起落架结构2,所述机身1左右两侧安装旋转机构3、双涵道式动力飞行器4和涵道倾转机构5,所述双涵道式动力飞行器4与旋转机构3相连,涵道倾转机构5与双涵道式动力飞行器4相连,所述两个双涵道式动力飞行器4左右对称,能够在涵道倾转机构5控制下通过旋转机构3相对机身独立进行前后倾转,从而实现无人机的前飞、后飞、左侧飞行、右侧飞行及转弯和调整气流的功能。
24.本实施例基于双涵道风扇动力系统的轻小型垂直升降无人飞行器,采用置于机身两侧、对称布局的双涵道动力系统,双涵道风扇通过倾转轴与机身相连,通过控制固定在机身的快速舵机分别控制两个涵道的角度进而提供矢量推力,可以为飞行器提供垂直起降的
升力和空中快速变换姿态的能力。本实施例通过结构设计,实现了无人机垂直升降,高空中迅速变姿,抗扰动能力强,能耗低,安全可靠,同时可搭载多种传感器,实现复杂环境下侦查,救援等功能。
25.实施例二
26.本实施例与实施例一基本相同,特别之处在于:
27.在本实施例中,所述的机身1包括连接杆11和固定板12,连接杆11连接左右两侧机身1,固定板12连接起落架结构2。
28.如图4所示,所述的起落架结构2包括固定架21、缓冲架22、着地架23,固定架21与固定板12连接,缓冲架22与固定架21之间设置为135
°
夹角,着地架23前端设置仰角45
°
。
29.所述的旋转机构3为两个独立轴承31,并且分别与两个双涵道式动力飞行器4的支撑架42相连。
30.如图2所示,所述的双涵道式动力飞行器4包括外涵道41、支撑涵道动力飞行器的支撑架42、驱动电机43、旋叶片机构44,驱动电机43和旋叶片机构44都安装在支撑架42上。本实施例中,所述的旋叶片机构44为三叶旋叶片45。
31.如图3所示,所述的涵道倾转机构5是四杆机构,包括底座51、摇杆52、两个连杆53,底座对称固定在机身1两侧,摇杆52通过铰链与底座51相连,摇杆52与两个连杆53通过球铰链连接且成对称分布,两个摇杆52分别与底座51相连提供倾转力,两个连杆53的另一端通过球铰链与双涵道式动力飞行器4连接。
32.本实用新型的工作原理及使用流程:
33.无人机的升降和加减速由系统的升力矢量大小变换而产生,而系统升力矢量大小变化由左右涵道驱动电机43控制旋叶片机构44速度组合而成。
34.系统的姿态的变换由系统竖直的升力矢量方向变换而产生,而系统升力矢量方向变化由涵道倾转机构5控制外涵道41倾斜程度组合而成。
35.同时,由于两涵道倾转机构5完全独立,因此涵道系统有多种倾斜组合,其中典型的两种组合如下:
36.双涵道同向倾斜同角度:两个双涵道式动力飞行器4向同一个方向倾斜相同的角度,涵道拉力可以使无人机向倾斜的方向加速行驶。
37.双涵道反向倾斜同角度:两个双涵道式动力飞行器4向着相反的方向倾斜相同的角度,能够使得无人机向左或向右旋转,实现无人机的转弯。
38.本实施例通过控制电机带动扇叶在涵道中旋转产生推力使得无人机可以垂直升降,通过控制舵机运动带动涵道倾斜使得无人机可以改变自身的姿态和运动。两个涵道对称布置,使用两个舵机通过连杆控制涵道倾斜角度,实现高精度姿态控制。同时涵道的动力系统和控制系统完全独立,克服了无人机飞行控制中的耦合问题,减少了算法复杂度的同时提高了无人机飞行的可靠性和稳定性。
39.上面结合附图对本实用新型实施例进行了说明,但本实用新型不限于上述实施例,还可以根据本实用新型的发明创造的目的做出多种变化,凡依据本实用新型技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本实用新型的发明目的,只要不背离本实用新型的技术原理和发明构思,都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1