保护装置、保护方法及无人机与流程
1.本发明涉及一种保护装置、保护方法及无人机。
背景技术:
2.专利文献1及2中记载有一种装置,它在壳体内生成气流以免尘埃等附着于无人机上所搭载的传感器。另外,专利文献3中记载有一种装置,它向搭载于无人机的传感器喷射清洗液,而对传感器表面进行清洗。专利文献1:国际公开第2018165937号专利文献2:国际公开第2019100316号专利文献3:日本专利特表2019-526206号公报发明要解决的问题
3.随着无人机应用范围的扩大,开始要求在各种环境下有效地保护传感器。
技术实现要素:
4.在本发明的第1方面,提供一种保护装置,用来保护搭载于无人机的传感器,具备:壳体;及喷嘴,其设置于壳体,并与容器连接;通过从喷嘴喷出容器的内容物而保护传感器。
5.保护装置可还具备从外部获取信息的信息获取部,基于信息获取部获取的信息,从喷嘴喷出内容物。
6.信息获取部可从操作者获取操作信息。
7.信息获取部可从无人机获取信息。
8.保护装置可还具备检测环境的变化的环境检测部,基于环境检测部检测出的变化,从喷嘴喷出内容物。
9.保护装置可还具备检测异物的异物检测部,对异物检测部检测出异物这一结果做出响应,而从喷嘴喷出内容物。
10.异物检测部可设置于比传感器更靠壳体的入口附近的位置,且喷嘴可设置于传感器与异物检测部之间。
11.异物检测部可具有受光部,检测异物接近受光部时的受光量变化。
12.异物检测部可具有通电部,检测异物接触通电部时的电阻变化。
13.喷嘴可设置于传感器与壳体的入口之间,且异物检测部可作为传感器而动作。
14.壳体可具有凹部,该凹部具有从壳体的入口朝向底部呈筒状或大致锥形的形状,且传感器可安装于底部,喷嘴可设置于凹部的侧面。
15.保护装置可还具备容器。
16.可从喷嘴向与朝着传感器的方向不同的方向喷出内容物。
17.喷出的内容物可包含液体。
18.喷出的内容物可包含针对生物的驱避剂。
19.在本发明的第2方面,提供一种保护方法,用来保护搭载于无人机的传感器,具备
如下步骤:通过从与容器连接的喷嘴喷出容器的内容物而保护传感器。
20.保护方法可还具备如下步骤:从外部获取信息;及基于所获取的信息,从喷嘴喷出内容物。
21.保护方法可还具备如下步骤:检测环境的变化;及基于检测出的变化,从喷嘴喷出内容物。
22.保护方法可还具备如下步骤:检测异物;及对检测出异物这一结果做出响应,而从喷嘴喷出内容物。
23.在本发明的第3方面,提供一种无人机,具备本发明的第1方式的保护装置。
24.此外,所述发明的概要并未列举出本发明的所有特征。另外,这些特征群的子组合也可成为发明。
附图说明
25.图1是表示无人机100的构成的一例的图。图2是表示操纵装置200的构成的一例的图。图3是表示终端装置300的构成的一例的图。图4a是表示壳体410的构成的一例的立体图。图4b是图4a所示的壳体410的剖视图。图5是表示喷出装置450的构成的一例的图。图6是表示实施例1的保护装置400的功能模块的一例的图。图7a是表示保护装置400的动作状态的一例的图。图7b是表示图7a中的壳体410的截面的一例的图。图8是表示实施例2的保护装置400的功能模块的一例的图。图9a是表示保护装置400的动作状态的一例的图。图9b是表示图9a中的壳体410的截面的一例的图。图10是表示实施例3的保护装置400的功能模块的一例的图。图11a是表示异物检测部412的一例的壳体410的剖视图。图11b是表示异物500接近图11a所示的异物检测部412的例子的图。图12a是表示异物检测部412的另一例的壳体410的立体图。图12b是图12a中的壳体410的剖视图。图13是表示异物检测部412的另一例的壳体410的剖视图。图14是表示保护方法的一例的流程图。图15是表示保护方法的另一例的流程图。图16是表示保护方法的另一例的流程图。
具体实施方式
26.以下,通过发明的实施方式对本发明进行说明,但以下实施方式并非对权利要求书所涉及的发明进行限定。另外,实施方式中所说明的特征的组合并非全部为发明的解决手段所必需的。
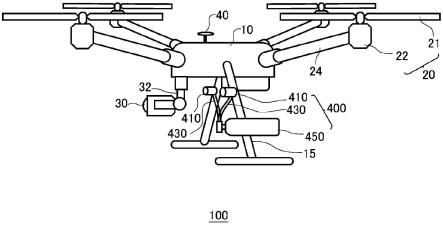
27.图1是表示无人机100的构成的一例的图。
28.无人机100是在空中飞行的飞行体。本例的无人机100具备主体部10、推进部20、可动相机30及gps(global positioning system,全球定位系统)信息接收部40。此外,本说明书中,将图1中可动相机30所朝向的方向称为无人机100的正面方向,但飞行方向并不限定于正面方向。
29.主体部10收纳无人机100的各种控制电路及电源等。另外,主体部10可作为连结无人机100的构成彼此的结构体发挥功能。本例的主体部10连结于推进部20。
30.主体部10连结于腿部15。腿部15在着陆时保持无人机100的姿势。腿部15在推进部20停止的状态下,保持无人机100的姿势。本例的无人机100具有2个腿部15。在腿部15上可安装可动相机30及保护装置400。
31.推进部20推进无人机100。推进部20具有旋转翼21及旋转驱动部22。本例的无人机100具备4个推进部20。推进部20经由臂部24安装于主体部10。此外,无人机100也可为具备固定翼的飞行体。
32.推进部20通过使旋转翼21旋转而获得推进力。旋转翼21以主体部10为中心设置有4个,但旋转翼21的配置方法并不限于本例。旋转翼21经由旋转驱动部22设置于臂部24的前端。
33.旋转驱动部22具有马达等动力源而驱动旋转翼21。旋转驱动部22可具有旋转翼21的制动机构。旋转翼21及旋转驱动部22也可省略臂部24而直接安装于主体部10。
34.臂部24是从主体部10呈放射状延伸而设置。本例的无人机100具备与4个推进部20对应设置的4个臂部24。臂部24可为固定式,也可为可动式。在臂部24上可固定相机等其它构成。
35.可动相机30拍摄无人机100周围的影像。本例的可动相机30设置在主体部10的下方。在一例中,下方是指相对于主体部10来说与设置有旋转翼21的一侧相反的一侧。
36.此外,无人机100除了具备可动相机30以外,还具备设置于主体部10的侧面的固定相机,但图1中省略了相关图示。可动相机30及固定相机拍摄不同区域的影像。例如,固定相机获取无人机100正面的影像,可动相机30获取比固定相机更小区域的影像。另外,在固定相机拍摄前进方向的情况下,可动相机30可拍摄下述保护装置400将容器的内容物465喷出的喷出方向的影像。
37.在一例中,将可动相机30及固定相机拍摄的影像发送到下述终端装置300。无人机100的操纵者可基于固定相机拍摄的影像操纵无人机100。另外,无人机100的操纵者可直接看着无人机100进行操纵。
38.本例的无人机100通过具备操纵用的固定相机及喷出控制用的可动相机30,而使操纵者容易操作。由于无需切换操纵用的操作画面与喷出控制用的操作画面,所以可防止操纵者混乱。另外,可在控制喷出的同时,容易地掌握无人机100周围的情况。
39.连结部32连结主体部10与可动相机30。连结部32可为固定,也可为可动。连结部32可为用于在三轴方向上控制可动相机30的位置的万向接头(gimbal)。
40.gps信息接收部40是设置于主体部10的侧面的天线。gps信息接收部40从gps卫星接收无人机100的位置信息。
41.无人机100上连结着保护搭载于无人机100的传感器的保护装置400。保护装置400具有壳体410、延伸部430及喷出装置450。传感器可为相机、超声波传感器、光传感器等。保
护装置400也可作为无人机100的构成要素而包含于其中。
42.壳体410连结于主体部10。壳体410也可连结于臂部24或腿部15等除主体部10以外的部件。在一例中,壳体410具有用于收容传感器的凹部420。
43.延伸部430是用于喷出容器460的内容物465的管。延伸部430设置为从喷出装置450的容器460延伸到壳体410,而连结壳体410及喷出装置450。延伸部430在壳体410内分支,与下述各喷嘴414连接。延伸部430的个数可根据壳体410的个数来设置。
44.喷出装置450保持填充有内容物465的下述容器460。喷出装置450连结于主体部10。喷出装置450也可连结于臂部24或腿部15等除主体部10以外的部件。在一例中,喷出装置450为收容容器460的筒状套筒。
45.喷出装置450的材料并不特别限定,只要能保持收容容器460的收容部的形状即可。例如,喷出装置450的材料包含铝等金属、塑料、或碳纤维等高强度且轻量的原材料。另外,喷出装置450的材料并不限于硬质材料,也可包含软质材料,例如硅酮橡胶或聚氨酯泡沫(urethane foam)等橡胶材料。此外,喷出装置450可具备用于将容器460加热或保温的加热机构。
46.图2是表示操纵装置200的构成的一例的图。操纵装置200具有天线210、操纵杆220及喷出按钮230。
47.操纵装置200经由天线210与无人机100可通信地连接。操纵杆220是用于供无人机100的操纵者输入无人机100的飞行指示的装置。操纵装置200将通过无人机100的操纵者操作操纵杆220而输入的飞行指示发送到无人机100,从而控制无人机100的飞行。
48.喷出按钮230是用于供无人机100的操纵者输入用来将容器460的内容物465喷出的喷出指示的装置。操纵装置200将通过无人机100的操纵者按下喷出按钮230而输入的喷出指示发送到保护装置400,从而控制容器460的内容物465的喷出。
49.喷出按钮230也可为杆等除按钮以外的形式。喷出按钮230也可与操纵杆220成一体。
50.操纵装置200可采用有线或无线的方式与终端装置300连接。也可设置多个操纵装置200,而分别用于无人机100的操纵与保护装置400的喷出控制。
51.此外,本例的操纵者是使用操纵装置200手动操纵无人机100。但是,操纵者也可不手动操纵,而是通过程序自动地操纵无人机100。另外,也可自动控制无人机100的操纵,但手动操作保护装置400的喷出。
52.图3是表示终端装置300的构成的一例的图。终端装置300包含显示部310。在一例中,终端装置300为智能手机、平板等移动终端。
53.在一例中,显示部310显示无人机100飞行的区域的地图信息。显示部310可将从gps信息接收部40获取的无人机100的位置信息与地图信息重叠在一起而显示。另外,显示部310也可如下所述将预先设定的保护装置400的工作区域320示于地图信息上。
54.或者,显示部310也可显示搭载于无人机100的固定相机及可动相机30各自拍摄的影像。例如,显示部310以分割开的画面显示固定相机及可动相机30的影像。终端装置300可与无人机100直接通信,也可经由操纵装置200间接地与无人机100通信。终端装置300也可与外部的服务器连接。
55.终端装置300可还具有输入装置,该输入装置用于供操纵者输入用来控制内容物
465的喷出的喷出控制信息。在一例中,喷出控制信息为喷出时间、间隔及次数等信息。
56.图4a是表示壳体410的构成的一例的立体图。壳体410具有在底部424安装有传感器50的凹部420。传感器50可为相机,也可为超声波传感器等测距传感器。在壳体410也可设置有未图示的温度传感器443或湿度传感器444。
57.喷嘴414设置在壳体410的入口411与安装于凹部420的底部424的传感器50之间。喷嘴414的个数并不限定,在一例中,从安装于底部424的传感器50呈放射状有规则地配置多个喷嘴414。
58.图4b是图4a所示的壳体410的剖视图。图4b的(a)所示的凹部420具有从壳体410的入口411朝向底部424呈大致锥形的形状。图4b的(b)所示的凹部420具有从壳体410的入口411至底部424为止内径固定的筒状形状。凹部420的形状并不限定于这些,只要为不遮挡安装于底部424的传感器50与外部的侦测对象物之间的路径的形状即可。
59.喷嘴414设置于凹部420的侧面426。各喷嘴414与连结于壳体410的延伸部430连接,而从各喷嘴414喷出容器460的内容物465。
60.图4b中,各喷嘴414的朝向与侧面426垂直,但并不限定于此。各喷嘴414只要朝向与从该喷嘴414向传感器50的方向不同的方向配置即可。即,各喷嘴414向与朝着传感器50的方向不同的方向喷出内容物465。
61.这样一来,保护装置400从喷嘴414喷出的内容物465不会直接接触传感器50,所以可避免因内容物附着于传感器50表面或使传感器50表面受到损伤等而导致传感器50出现检测错误。
62.图5是表示喷出装置450的构成的一例的图。图5表示喷出装置450的剖视图。喷出装置450保持容器460。容器460也可作为保护装置400的构成要素而包含于其中。
63.本例的喷出装置450具备主体451、第1端盖部453及第2端盖部455。另外,喷出装置450具备用于控制从容器460的喷出的喷出驱动部480。
64.容器460可为通过气压将填充于内部的内容物465喷出的气溶胶容器。例如,容器460通过填充于内部的液化气体或压缩气体的气压将内容物465喷出。本例的容器460为金属制气溶胶罐。容器460可为具有耐压性的塑料容器。容器460以收容在喷出装置450中的状态搭载。容器460并不限于气溶胶容器,也可为树脂制桶(tank)。
65.内容物465可根据无人机100的飞行区域来选择。换句话说,内容物465可根据保护装置400的使用目的来选择。内容物465可为气体,也可为液体。另外,从喷嘴414喷出的内容物465可包含液体,也可为干燥气体,或者也可经过加热。喷出的内容物465可为水,也可包含针对生物的驱避剂等药剂。喷出的内容物465可为空气,也可为n2或co2。
66.或者,内容物465可根据搭载于无人机100的传感器50的特性来选择。在搭载超声波传感器作为传感器50的情况下,如果超声波传感器受潮,则感度下降,所以内容物465可为气体。
67.此外,喷射剂可使用烃(液化石油气)(lpg)、二甲醚(dme)、氢氟碳(hfo-1234ze)等液化气体、二氧化碳(co2)、氮气(n2)、一氧化二氮(n2o)等压缩气体。
68.主体451具有直径比容器460大的圆筒状的形状。本例的主体451夹在第1端盖部453与第2端盖部455之间。
69.第1端盖部453覆盖主体451的一端部。本例的第1端盖部453覆盖容器460的喷射侧
的端部。第1端盖部453经由螺丝部452可装卸地旋入主体451中而固定于其上。本例的第1端盖部453具有圆顶状的盖主体。考虑到空气动力特性,第1端盖部453以越靠近前端则直径逐渐变得越小的方式缩径。第1端盖部453具有前端带弧度的圆锥状或圆顶状的曲面。通过像这样采用空气动力特性良好的形状,横风的影响变小,从而可实现飞行的稳定化。
70.第2端盖部455覆盖主体451的除由第1端盖部453覆盖的端部以外的另一端部。本例的第2端盖部455覆盖容器460的与喷射侧相反一侧的端部。第2端盖部455与主体451一体地构成。另外,第2端盖部455可设置成能与主体451拆开。
71.喷出驱动部480对从下述异物检测部412、或下述信息获取部440或环境检测部442接收到的喷出信号做出响应,而从容器460喷出内容物465。喷出驱动部480收纳在位于容器460的底部侧的第2端盖部455中。第2端盖部455作为喷出驱动部480的壳体发挥功能。喷出驱动部480具备凸轮481、凸轮从动件482及可动板483。喷出驱动部480设置于喷出装置450,因此更换容器460时无需更换喷出驱动部480。
72.凸轮481通过驱动源而旋转驱动。在一例中,使用马达作为驱动源。凸轮481具有旋转中心到外周的距离不同的结构。此外,在图示例中,凸轮481的形状有所夸张。凸轮481在外周与凸轮从动件482接触。
73.凸轮从动件482设置于凸轮481与可动板483之间。凸轮从动件482连接于凸轮481及可动板483,将凸轮481的旋转运动变成直线运动并传递到可动板483。
74.可动板483设置为与容器460的底面相接,控制容器460的阀的开启及关闭。可动板483通过凸轮从动件482而前后移动。例如,在凸轮481的旋转中心与凸轮从动件482所抵接的凸轮481的接触区域的距离较短的情况下,可动板483相对于容器460后退,将容器460的阀关闭。另一方面,在凸轮481的旋转中心与凸轮从动件482所抵接的凸轮481的接触区域的距离较长的情况下,可动板483相对于容器460前进,将容器460的阀打开。
75.此外,虽然喷出驱动部480具有将马达的旋转运动通过凸轮机构转换成直线运动的构成,但并不限定于凸轮机构。例如,喷出驱动部480的机构只要为螺杆进给机构、齿条与小齿轮等将马达的旋转运动转换成直线运动的机构即可。另外,作为驱动源,可并非为旋转马达,而是具备直线驱动用线性马达、或电磁螺线管等。
76.杆462设置于容器460。通过利用致动器454推压杆462,而从容器460喷出内容物465。从容器460喷出的内容物465经由延伸部430从壳体410的喷嘴414喷出。
77.本例的容器460为气溶胶容器,因此即使容器460空了,也只要搭载新的容器460即可容易地加以更换。另外,内容物465不易附着于人体,更换时的安全性高。
78.[实施例1]对实施例1的保护装置进行说明。图6是表示实施例1的保护装置400的功能模块的一例的图。图6中,与保护装置400的功能模块一并示出了无人机100的功能模块的一例。
[0079]
无人机控制部110以有线或无线的方式与可动相机30、gps信息接收部40、高度信息接收部42、传感器50及通信部60连接。在一例中,无人机控制部110、可动相机30、gps信息接收部40、高度信息接收部42及通信部60设置于无人机100的主体部10,传感器50设置于壳体410。高度信息接收部42从高度计获取无人机100的高度信息。无人机控制部110经由通信部60从操纵装置200获取操纵信息。
[0080]
无人机控制部110按预先设定的周期从可动相机30、gps信息接收部40、高度信息
接收部42、传感器50及通信部60获取信息,并基于所获取的信息,控制无人机100的飞行。
[0081]
本例的保护装置400具备信息获取部440、通信部441及喷出装置450。信息获取部440及通信部441可分别设置于无人机100的主体部10,它们的功能也可分别由无人机控制部110及通信部60来承担。信息获取部440及通信部441以有线或无线的方式相互连接。另外,信息获取部440以有线或无线的方式与喷出装置450连接。信息获取部440经由通信部441以无线的方式与操纵装置200连接。另外,信息获取部440以有线或无线的方式与无人机100的无人机控制部110连接。
[0082]
或者,信息获取部440及通信部441也可设置于壳体410。该情况下,信息获取部440及通信部441以有线或无线的方式相互连接。另外,信息获取部440以有线或无线的方式与喷出装置450连接。信息获取部440经由通信部441以无线的方式与操纵装置200连接。另外,信息获取部440以有线或无线的方式与无人机100的无人机控制部110连接。
[0083]
信息获取部440从外部获取信息,并基于所获取的信息,将喷出信号发送到喷出装置450。在一例中,信息获取部440经由通信部441从操纵装置200获取信息。当操纵装置200将通过喷出按钮230输入的操纵者的喷出指示发送到保护装置400时,信息获取部440将基于所获取的喷出指示而生成的喷出信号发送到喷出装置450。喷出装置450的喷出驱动部480基于接收到的喷出信号,将容器460的阀开启及关闭而释出内容物465,从而内容物465经由延伸部430从壳体410的喷嘴414喷出。
[0084]
或者,信息获取部440及通信部441也可设置于喷出装置450。该情况下,信息获取部440及通信部441以有线或无线的方式相互连接。信息获取部440经由通信部441从操纵装置200获取信息。当操纵装置200将通过喷出按钮230输入的操纵者的喷出指示发送到保护装置400时,信息获取部440将基于所获取的喷出指示而生成的喷出信号输出到喷出驱动部480。喷出驱动部480基于所输入的喷出信号,将容器460的阀开启及关闭而释出内容物465,从而内容物465经由延伸部430从壳体410的喷嘴414喷出。
[0085]
图7a是表示保护装置400的动作状态的一例的图。这里,以无人机100进入工作区域320的情况为例,对保护装置400的动作进行说明。
[0086]
无人机100的操纵者将保护装置400的工作区域320的位置信息输入到终端装置300。工作区域320是当无人机100进入时要被保护装置400喷射容器460的内容物465的预先设定的区域。在一例中,工作区域320是异物500纷飞的森林等区域。终端装置300可在显示部310所显示的地图信息上示出工作区域320。
[0087]
终端装置300将工作区域320的位置信息预先发送到无人机控制部110。无人机控制部110将所获取的工作区域320的位置信息存储到存储器等中。
[0088]
终端装置300也可将操纵者设定的喷出时间、间隔及次数等喷出控制信息预先发送到信息获取部440。信息获取部440将所获取的喷出控制信息存储到存储器等中。
[0089]
在无人机100飞行的过程中,无人机控制部110将从gps信息接收部40获取的无人机100的位置信息与所存储的工作区域320的位置信息进行比较。在无人机100的位置信息与工作区域320的位置信息一致的情况下,无人机控制部110将表示无人机100已进入工作区域320的进入信息发送到保护装置400的信息获取部440。信息获取部440基于所获取的进入信息及所存储的喷出控制信息,将喷出信号发送到喷出装置450。
[0090]
喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物
465。在一例中,喷出的内容物465包含针对生物的驱避剂。喷出的内容物465悬浮在壳体410的入口411附近的大气中,阻止异物500接近传感器50。像这样,保护装置400在异物500较多的区域,通过预防性地从喷嘴414喷出容器460的内容物465而保护传感器50。
[0091]
或者,保护装置400也可对从操纵装置200输入的操纵者的喷出指示做出响应,而从喷嘴414喷出容器460的内容物465。操纵装置200将操纵者通过喷出按钮230而输入的喷出指示经由天线210发送到保护装置400。信息获取部440经由通信部441接收喷出指示,并基于所获取的喷出指示,将喷出信号发送到喷出装置450。
[0092]
像这样,保护装置400也通过以下手段而保护传感器50,即:在操纵者从终端装置300的显示部310所显示的可动相机30的拍摄影像确认了无人机100的飞行区域的状况而下达指示后,保护装置400对该指示做出响应,而从喷嘴414喷出容器460的内容物465。
[0093]
图7b是表示图7a中的壳体410的截面的一例的图。
[0094]
保护装置400基于信息获取部440获取的信息,从喷嘴414喷出容器460的内容物465。在一例中,喷出的内容物465包含雾状的生物驱避剂。从多个喷嘴414喷出的内容物465在从壳体410的凹部420内到入口411附近的区间汇合而形成气帘,阻止异物500接近传感器50。
[0095]
[实施例2]接着,对实施例2的保护装置进行说明。图8是表示实施例2的保护装置400的功能模块的一例的图。
[0096]
本例的保护装置400具备检测环境的变化的环境检测部442、温度传感器443及湿度传感器444、以及喷出装置450。温度传感器443及湿度传感器444设置于壳体410。环境检测部442可设置于无人机100的主体部10,其功能也可由无人机控制部110来承担。或者,环境检测部442也可设置于壳体410。环境检测部442以有线或无线的方式与温度传感器443及湿度传感器444连接。另外,环境检测部442以有线或无线的方式与喷出装置450连接。
[0097]
温度传感器443及湿度传感器444分别测定壳体410内的温度及湿度,并按预先设定的周期将温度及湿度发送到环境检测部442。环境检测部442根据所获取的温度及湿度检测环境的变化。
[0098]
在一例中,环境检测部442在检测出温度及湿度的变化量超过预先确定的阈值的情况下,将喷出信号发送到喷出装置450。喷出装置450的喷出驱动部480基于接收到的喷出信号,将容器460的阀开启及关闭而释出内容物465,从而内容物465经由延伸部430从壳体410的喷嘴414喷出。
[0099]
或者,环境检测部442也可设置于喷出装置450。该情况下,环境检测部442以有线或无线的方式与温度传感器443及湿度传感器444连接。环境检测部442根据所获取的温度及湿度检测环境的变化。环境检测部442在检测出温度及湿度的变化量超过预先确定的阈值的情况下,将喷出信号输出到喷出驱动部480。喷出驱动部480基于所输入的喷出信号,将容器460的阀开启及关闭而释出内容物465,从而内容物465经由延伸部430从壳体410的喷嘴414喷出。
[0100]
图9a是表示保护装置400的动作状态的一例的图。这里,以无人机100进入灭火活动现场的情况为例,对保护装置400的动作进行说明。
[0101]
一般来说,灭火活动现场的温度及湿度比其它区域高。在无人机100于灭火活动现
场飞行的情况下,喷出装置450收容容器460,该容器460中填充有不含水分的n2或co2等干燥气体作为内容物465。
[0102]
当无人机100进入灭火活动现场时,环境检测部442检测出温度及湿度的上升超过了预先确定的阈值。环境检测部442将所生成的喷出信号发送到喷出装置450。
[0103]
喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。喷出的内容物465使壳体410的凹部420内的气体氛围中的水分含量降低。
[0104]
图9b是表示图9a中的壳体410的截面的一例的图。
[0105]
保护装置400基于环境检测部442检测出的变化,将容器460的内容物465从喷嘴414喷出。从多个喷嘴414喷出的内容物465使壳体410的凹部420内的气体氛围中的水分含量降低,防止传感器50的表面结露。
[0106]
或者,在无人机100于寒冷地区飞行的情况下,喷出装置450可通过加热机构将容器460加热或保温,以使喷出的内容物465成为暖风。环境检测部442在检测出温度的下降超过了预先确定的阈值时,将所生成的喷出信号发送到喷出装置450。喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。喷出的内容物465使壳体410的凹部420内的温度上升,防止传感器50的表面结冰。
[0107]
[实施例3]接着,对实施例3的保护装置进行说明。图10是表示实施例3的保护装置400的功能模块的一例的图。
[0108]
本例的保护装置400具备检测异物的异物检测部412、及喷出装置450。异物检测部412设置于壳体410。异物检测部412以有线或无线的方式与喷出装置450连接。
[0109]
异物检测部412在检测出异物500时,将所生成的喷出信号发送到喷出装置450。喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。
[0110]
该情况下,内容物465可为气体,也可包含液体。保护装置400可使从喷嘴414喷出的内容物465击中检测出的异物500,通过该冲击来排除异物500。或者,内容物465也可包含针对生物的驱避剂。
[0111]
图11a是表示异物检测部412的一例的壳体410的剖视图。图11a中,异物检测部412具有设置于壳体410的入口411附近的一对发光部及受光部。在一例中,于凹部420的底部424安装着作为传感器50的相机及传感器盖52。
[0112]
异物检测部412的发光部朝向受光部发光。异物检测部412在检测出受光部的受光量变化时,将所生成的喷出信号发送到喷出装置450。喷出装置450的喷出驱动部480基于接收到的喷出信号,将容器460的阀开启及关闭而释出内容物465,从而内容物465经由延伸部430从壳体410的喷嘴414喷出。
[0113]
此外,在无人机100于环境光的光量足够强的区域飞行的情况下,异物检测部412也可不具有发光部,而仅具有受光部。
[0114]
图11b是表示异物500接近图11a所示的异物检测部412的例子的图。
[0115]
当异物500通过从异物检测部412的发光部去往受光部的光的路径时,异物检测部412检测出受光部的受光量变化,而将所生成的喷出信号发送到喷出装置450。
[0116]
喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。喷出的内容物465击中接近传感器50的异物500,而将异物500排除。
[0117]
像这样,保护装置400在异物检测部412检测出受光部的受光量变化时,判定异物500接近受光部,于是从喷嘴414喷出容器460的内容物465,从而保护传感器50免受异物500影响。
[0118]
图12a是表示异物检测部412的另一例的壳体410的立体图。另外,图12b是图12a中的壳体410的剖视图。异物检测部412具有设置于壳体410的入口411附近的导线等通电部。在一例中,在凹部420的底部424安装有超声波传感器等作为传感器50。
[0119]
异物检测部412在检测出通电部中的电阻变化时,将所生成的喷出信号发送到喷出装置450。
[0120]
喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。喷出的内容物465击中接近传感器50的异物500,而将异物500排除。
[0121]
像这样,保护装置400在异物检测部412检测出通电部中的电阻变化时,判定作为导电体的异物500与通电部接触,于是从喷嘴414喷出容器460的内容物465,从而保护传感器50免受异物500影响。
[0122]
此外,实施例1至3的保护装置400也可组合。即,保护装置400可具备信息获取部440、环境检测部442及异物检测部412中的至少一个。
[0123]
图13是表示异物检测部412的另一例的壳体410的剖视图。异物检测部412安装于凹部420的底部424,作为传感器50而动作。在一例中,异物检测部412是超声波传感器、lidar(light detection and ranging,激光雷达)等测距传感器。在一例中,异物检测部412作为传感器50,对无人机100周围的障碍物的距离进行监视。
[0124]
当异物500位于异物检测部412所发出的超声波或激光等的路径上时,异物检测部412检测出测距值的急剧变化,而将所生成的喷出信号发送到喷出装置450。
[0125]
喷出装置450对所获取的喷出信号做出响应,而从喷嘴414喷出容器460的内容物465。喷出的内容物465击中接近传感器50的异物500,而将异物500排除。
[0126]
像这样,保护装置400在异物检测部412检测出测距值的急剧变化时,判定异物500接近传感器50(即异物检测部412),于是从喷嘴414喷出容器460的内容物465,从而保护传感器50免受异物500影响。
[0127]
图14是表示保护方法的一例的流程图。本例的保护方法可应用于所述保护装置400。
[0128]
在步骤s1402中,保护装置400从外部获取信息。
[0129]
在步骤s1404中,保护装置400基于所获取的信息,从与容器460连接的喷嘴414喷出容器460的内容物465。
[0130]
图15是表示保护方法的另一例的流程图。
[0131]
在步骤s1502中,保护装置400检测环境的变化。
[0132]
在步骤s1504中,保护装置400基于检测出的变化,从喷嘴414喷出内容物465。
[0133]
图16是表示保护方法的另一例的流程图。
[0134]
在步骤s1602中,保护装置400检测异物500。
[0135]
在步骤s1604中,保护装置400对检测出异物500这一结果做出响应,而从喷嘴414喷出内容物465。
[0136]
像这样,本例的保护方法保护搭载于无人机100的传感器50。
[0137]
以上,使用实施方式对本发明进行了说明,但本发明的技术范围并不限定于所述实施方式中记载的范围。本领域技术人员应明白对所述实施方式可施加多种变更或改良。根据权利要求书的记载可知,这种施加变更或改良而获得的实施方式也可包含在本发明的技术范围内。
[0138]
应予以注意的是,关于权利要求书、说明书及附图中所示的装置、系统、程序及方法中的动作、步序、步骤及阶段等各处理的执行顺序,只要未特别表明是“在
……
之前”、“先于
……”
等,也并不在后一处理中使用前一处理的输出,便可按照任意顺序来实现。关于权利要求书、说明书及附图中的动作流程,尽管为了方便起见而使用“首先,
……”
、“其次,
……”
等进行了说明,但并不意味着必须按照该顺序来实施。附图标记的说明
[0139]
10:主体部15:腿部20:推进部21:旋转翼22:旋转驱动部24:臂部30:可动相机32:连结部40:gps信息接收部42:高度信息接收部50:传感器52:传感器盖60:通信部100:无人机110:无人机控制部200:操纵装置210:天线220:操纵杆230:喷出按钮300:终端装置310:显示部320:工作区域400:保护装置410:壳体411:入口412:异物检测部414:喷嘴420:凹部424:底部
426:侧面430:延伸部440:信息获取部441:通信部442:环境检测部443:温度传感器444:湿度传感器450:喷出装置451:主体452:螺丝部453:第1端盖部454:致动器455:第2端盖部460:容器462:杆465:内容物480:喷出驱动部481:凸轮482:凸轮从动件483:可动板500:异物
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1