一种无人机停机坪的虹膜归中装置的制作方法
1.本发明涉及无人机设备制造领域,特别涉及一种无人机停机坪的虹膜归中装置。
背景技术:
2.无人机停机坪是放置在无人机停机库内,用于给无人机升降提供平台。为了保证无人机落在无人机停机坪的中心位置,现有常设置了一种定位归中的装置,辅助移动无人机至停机坪的中心位置,避免无人机和机库的侧壁等发生碰撞,也便于收纳无人机。
3.现有中常见的归中方案如专利申请为cn202110671672.5,利用归中轴从x和y方向来向中间推进,以实现无人机归中。但是,这种归中方案存在单次控制时带动无人机移动的方向单一的问题,无法找到较佳的归中路线。并且,由于归中轴的前进距离是固定的,一边的归中轴与其对面的归中轴夹住无人机底座的棱角的情况。此时,一旦归中轴的力度控制不当,容易造成无人机脱出的情况,给归中轴的机械控制带来了难度,也导致最后归中的无人机不够正,归中效果不理想。可见,现有的夹持方案控制难度高,归中效果并不是很好。
技术实现要素:
4.本发明所要解决的技术问题是:提供一种无人机停机坪的虹膜归中装置,降低无人机归中的控制难度,还能够具有极佳的归中效果。
5.为了解决上述问题,本发明采用的方案为:
6.一种无人机停机坪的虹膜归中装置,包括驱动结构、圆形底座、停机平台、固定环和多个用于推动无人机的虹膜片;
7.所述固定环可转动地设置于无人机停机坪上,所述停机平台位于所述固定环的内环内,多个所述虹膜片一端分别与所述固定环转动连接且连接位置环绕所述停机平台,所有所述虹膜片在垂直于所述停机平台的方向上分别位于不同的高度层,所有所述虹膜片之间相互平行,所述虹膜片两端之间的距离大于或等于所述停机平台的边沿到其中心位置的距离;
8.所述驱动结构设置于所述停机平台下方,所述驱动结构用于分别控制所述虹膜片朝所述停机平台的中心位置转动,多个所述虹膜片在转动时相互交叠,形成一个在所述停机坪台上且随着所述虹膜片的转动逐渐缩小的多边形,所述圆形底座用于装设在无人机的底部。
9.综上所述,本发明的有益效果在于:提供一种无人机停机坪的虹膜归中装置,在固定环上环绕设置了多个虹膜片,采用转动的方式使的每个虹膜片都往停机平台的中心转动,相互交叠形成一个随着所述虹膜片的转动逐渐缩小的多边形,使得无人机随着多边形的减小被慢慢推向中心位置,由于使用转动方式,由多个虹膜片交替推动无人机,与圆形底座的设计相配合,具有多方向推动的效果,可找到较短的归中路线并实现精准归中,不会存在夹住无人机的问题,降低无人机归中的控制难度,还能够具有极佳的归中效果。
附图说明
10.图1为本发明实施例的一种无人机停机坪的虹膜归中装置的结构主视图;
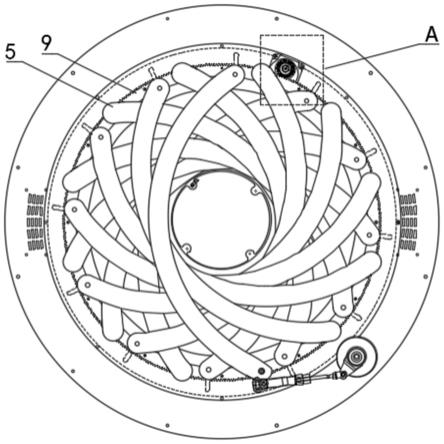
11.图2为本发明实施例的一种无人机停机坪的虹膜归中装置归中前的俯视图;
12.图3为本发明实施例的一种无人机停机坪的虹膜归中装置归中后的俯视图;
13.图4为图3中a处的放大示意图;
14.图5为本发明实施例的一种无人机停机坪中单个虹膜片、固定环和转动环之间的安装位置示意图。
15.标号说明:
16.1、无人机停机坪;2、圆形底座;3、停机平台;4、固定环;5、虹膜片;6、转动装置;7、驱动齿轮;8、导向件;9、环形齿轮;10、转动环。
具体实施方式
17.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
18.请参照图1至图5,一种无人机停机坪的虹膜归中装置,包括驱动结构、圆形底座2、停机平台3、固定环4和多个用于推动无人机的虹膜片5;
19.所述固定环4可转动地设置于无人机停机坪1上,所述停机平台3位于所述固定环4的内环内,多个所述虹膜片5一端分别与所述固定环4转动连接且连接位置环绕所述停机平台3,所有所述虹膜片5在垂直于所述停机平台3的方向上分别位于不同的高度层,所有所述虹膜片5之间相互平行,所述虹膜片5两端之间的距离大于或等于所述停机平台3的边沿到其中心位置的距离;
20.所述驱动结构设置于所述停机平台3下方,所述驱动结构用于分别控制所述虹膜片5朝所述停机平台3的中心位置转动,多个所述虹膜片5在转动时相互交叠,形成一个在所述停机坪台上且随着所述虹膜片5的转动逐渐缩小的多边形,所述圆形底座2用于装设在无人机的底部。
21.从上述描述可知,本发明的有益效果在于:在固定环4上环绕设置了多个虹膜片5,采用转动的方式使的每个虹膜片5都往停机平台3的中心转动,相互交叠形成一个随着所述虹膜片5的转动逐渐缩小的多边形,使得无人机随着多边形的减小被慢慢推向中心位置,由于使用转动方式,由多个虹膜片5交替推动无人机,与圆形底座2的设计相配合,具有多方向推动的效果,可找到较短的归中路线并实现精准归中,不会存在夹住无人机的问题,降低无人机归中的控制难度,还能够具有极佳的归中效果。
22.进一步地,所述驱动结构包括转动装置6、导向件8和转动环10;
23.所述转动环10设置于固定环4下方且与所述固定环4组成叠层结构,所述转动装置6的活动端与所述转动环10传动连接;
24.多个所述导向件8分布设置于所述转动环10上且分布位置环绕所述停机平台3,所述导向件8的导向方向朝向或远离所述停机平台3的中心位置,所述虹膜片5与所述导向件8一一对应且远离所述固定环4的一端可滑动的固定于所述导向件8上。
25.从上述描述可知,转动环10和固定环4呈叠层设置,并分别用于固定虹膜片5的两端,在转动装置6驱动转动环10转动的同时,虹膜片5绕着固定在固定环4上的固定点转动,
一端在转动环10上朝向停机平台3的中心位置滑动,从而实现整个虹膜片5往停机平台3中间横扫的效果,推动无人机向停机平台3中心靠近。
26.进一步地,驱动结构还包括驱动齿轮7和环形齿轮9;
27.所述环形齿轮9固定于所述转动环10上且与所述转动环10组成同心圆结构,所述驱动齿轮7固定于所述转动装置6的活动端上且与所述环形齿轮9啮合连接;
28.所述推杆装置相邻所述停机平台3设置且活动端朝向所述转动件设置,所述推杆装置用于推动所述转动件转动。
29.从上述描述可知,转动装置6通过驱动齿轮7和环形齿轮9的传动来带动转动环10转动,其传动结构简单稳定,还能够实现随转随停,使用方便。
30.进一步地,所述导向件8为导向槽;
31.多个所述导向槽分布设置于所述转动环10上且分布位置环绕所述停机平台3,所述导向槽的滑槽方向朝向或远离所述停机平台3的中心位置,所述虹膜片5与所述导向槽一一对应且远离所述固定环4的一端可滑动地设置于所述导向槽内。
32.从上述描述可知,将虹膜片5的一端可滑动地设置在导向槽内,使得转动环10在转动时,虹膜片5绕着固定在固定环4上的固定点转动,一端在转动环10上朝向停机平台3的中心位置滑动,从而实现整个虹膜片5往停机平台3中间横扫的效果,推动无人机向停机平台3中心靠近。
33.进一步地,所述虹膜片5为弧形;
34.每个所述虹膜片5凹陷的一侧均朝向所述停机平台3的中心设置。
35.从上述描述可知,虹膜片5为弧形,使得不同的虹膜片5在交叠时更加容易在中心形成一个近圆形,从而与无人机的圆形底座2更加适配,能够有效地缩短无人机的归中路径,使得归中效果更好。
36.进一步地,所述虹膜片5的弧度与所述转动环10的边缘相适配。
37.从上述描述可知,虹膜片5的弧度与转动环10的边缘相适配,以便于在不需要归中时,虹膜片5能够重叠收纳于转动环10上,不会占用停机平台3的空间,为无人机停靠留出更大的停机面积。
38.进一步地,所述转动装置6为减速电机,所述驱动齿轮7固定与所述减速电机的活动端上。
39.从上述描述可知,减速电机控制灵敏,能够合理的控制环形齿轮9的转动速度,进而把握虹膜归中的节奏,稳定地将无人机归中。
40.进一步地,所述环形支撑台为圆形,所述虹膜片5的数量为12个;
41.12个所述虹膜片5的一端一一对应且可转动地设置于所述环形支撑台的12个等分点上。
42.从上述描述可知,12个虹膜片5对称分布,在归中时从360
°
全方位向停机平台3的中心接近,使得作用在无人机上的推力更多且来自不同方向,以提升无人机的归中效果。
43.本发明的一种无人机停机坪的虹膜归中装置,适用于无人机停机后进行归中的应用场景,以下结合具体实施例进行具体说明:
44.请参照图1至图5。本发明的实施例一为:
45.一种无人机停机坪的虹膜归中装置,如图1、图2以及图5所示,包括驱动结构、圆形
底座2、停机平台3、固定环4和多个用于推动无人机的虹膜片5。固定环4可转动地设置于无人机停机坪1上,停机平台3位于固定环4的内环内,多个虹膜片5一端分别与固定环4转动连接且连接位置环绕停机平台3,所有虹膜片5在垂直于停机平台3的方向上分别位于不同的高度层,所有虹膜片5之间相互平行,虹膜片5两端之间的距离大于或等于停机平台3的边沿到其中心位置的距离;
46.在本实施例中,如图3和图4所示,驱动结构设置于停机平台3下方,驱动结构用于分别控制虹膜片5朝停机平台3的中心位置转动,多个虹膜片5在转动时相互交叠,形成一个在停机坪台上且随着虹膜片5的转动逐渐缩小的多边形,圆形底座2用于装设在无人机的底部。为了获得更好地归中效果,虹膜片5为弧形,每个虹膜片5凹陷的一侧均朝向停机平台3的中心设置。并且,环形支撑台为圆形,虹膜片5的数量为12个。12个虹膜片5的一端一一对应且可转动地设置于环形支撑台的12个等分点上。并且,虹膜片5的弧度和转动环10相适配,以便于收纳虹膜片5。
47.在本实施例中,一种无人机停机坪的虹膜归中装置实现虹膜归中的原理为:
48.如图2和图3所示,当带有圆形底座2的无人机停靠在停机平台3上时,驱动装置动作,依次使得每个虹膜片5往停机平台3的中心拨动,在每个虹膜片5的推动作用下,圆形底座2以曲线运动的方式慢慢向停机平台3中心靠近,由于虹膜片5位于停机平台3周围不同的位置,其提供的的推力方向也不同。并且,在转动的虹膜片5增多的情况下,多个虹膜片5围成的封闭图形就逐渐向停机平台3的中心缩小,相应地,圆形底座2就被带至停机平台3的中心,完成归中。
49.请参照图3至图4,本发明的实施例二为:
50.一种无人机停机坪的虹膜归中装置,在上述实施例一的基础上,如图3至图4所示,驱动结构包括转动装置6、导向件8和转动环10;转动环10设置于固定环4下方且与固定环4组成叠层结构,转动装置6的活动端与转动环10传动连接。多个导向件8分布设置于转动环10上且分布位置环绕停机平台3,导向件8的导向方向朝向或远离停机平台3的中心位置,虹膜片5与导向件8一一对应且远离固定环4的一端可滑动的固定于导向件8上。
51.在本实施例中,如图4所示,驱动结构还包括驱动齿轮7和环形齿轮9;
52.环形齿轮9固定于转动环10上且与转动环10组成同心圆结构,驱动齿轮7固定于转动装置6的活动端上且与环形齿轮9啮合连接。推杆装置相邻停机平台3设置且活动端朝向转动件设置,推杆装置用于推动转动件转动。
53.在本实施例中,如图5所示,导向件8为导向槽。多个导向槽分布设置于转动环10上且分布位置环绕停机平台3,导向槽的滑槽方向朝向或远离停机平台3的中心位置,虹膜片5与导向槽一一对应且远离固定环4的一端可滑动地设置于导向槽内。
54.在本实施例中,驱动结构实现分别转动每个虹膜片5的过程为:
55.驱动电机开始运作,使得驱动齿轮7转动,通过齿轮之间的啮合连接,环形齿轮9也开始转动,由于虹膜片5一端可转动地设置在固定换上,所以虹膜片5就会跟着摆动;用时,虹膜片5的另一端在导向槽向着停机平台3中心的方向滑动,即整个虹膜片5向停机平台3的中心摆动。在多个虹膜片5同时摆动的情况下,最后如图3所示,实现虹膜归中的效果。
56.此外,在本实施例中,转动装置6为减速电机,驱动齿轮7固定与减速电机的活动端上。
57.综上所述,本发明公开了一种无人机停机坪的虹膜归中装置,在固定环上环绕设置了多个虹膜片,采用转动的方式使的每个虹膜片都往停机平台的中心转动,相互交叠形成一个随着所述虹膜片的转动逐渐缩小的多边形,使得无人机随着多边形的减小被慢慢推向中心位置,由于使用转动方式,由多个虹膜片交替推动无人机,与圆形底座的设计相配合,具有多方向推动的效果,可找到较短的归中路线并实现精准归中,不会存在夹住无人机的问题,降低无人机归中的控制难度,还能够具有极佳的归中效果。
58.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1