无人机投放智能注油机器人及方法
1.本发明涉及矿山运输设备技术领域,更具体的说是涉及一种无人机投放智能注油机器人及方法。
背景技术:
2.多绳摩擦式提升机是一种重要的矿山机械运输设备,适用于煤炭、有色金属、黑色金属、非金属、化工等矿山的提升系统,提升容器是由多根提升钢丝绳共同悬挂的,一般采用偶数根,最常用4绳或6绳,所以提升钢丝绳直径就比相同载荷下单绳提升机的钢丝绳直径小,而且摩擦轮直径也小。因而在提升同样载荷的情况下,多绳摩擦式提升机具有体积小、重量轻、节约材料、制造容易、易安装和运输方便等特点。若发生了事故,多根钢丝绳同时断裂的可能性极小,因而有较好的安全可靠性。适用于深井,是未来矿山运输设备的发展方向。
3.多绳摩擦式提升机天轮装置作用是支托提升机摩擦轮到提升容器之间的钢丝绳并用来改变钢丝绳的方向,即导向作用。天轮装置结构有两种,普通天轮装置和新型天轮装置。大部分天轮装置为普通天轮结构,主要由轴承座、两端轴承、天轮轴、游动轮、固定轮、轴瓦、衬垫和卡箍等组成。其中,左端轮子为固定轮,与天轮轴靠平键联接;右侧3个轮子为游动轮,游动轮与天轮轴之间有轴瓦,轴瓦与游动轮毂之间靠高强度螺栓联接;轴瓦内部有储油槽,通过润滑油脂来实现游动轮与天轮轴灵活转动。当每根钢绳的线速度不完全相同时,游动轮与天轮轴之间可自由地相对转动,防止钢丝绳与衬垫之间产生滑动摩擦,避免衬垫过度磨损,起到保护钢丝绳的作用。该结构的天轮装置应用较为广泛,技术成熟。
4.天轮装置使用现场环境恶劣,需要定期对天轮装置进行维护,天轮装置在使用不当、维护不及时进行拆解、检测后,发现多数天轮存在的不是单一问题。近年来随着煤炭资源的整合,矿井设备更新换代,提升机的提升能力和规格也随之增大,如因使用中不及时维护出现问题而重新采购一组天轮装置,特别对大规格的提升机来说,生产成本相当高。
5.因此,针对天轮装置需要对轴瓦进行定期注油润滑的问题,提供一种智能机器人及方法,是本领域技术人员亟需解决的问题。
技术实现要素:
6.有鉴于此,本发明提供了一种无人机投放智能注油机器人及方法,旨在解决上述技术问题。
7.为了实现上述目的,本发明采用如下技术方案:
8.一种无人机投放智能注油机器人,包括飞行执行系统和地面总控系统:
9.所述飞行执行系统包括旋翼飞行器、行走小车、机器人、控制系统和驱动系统;所述行走小车与所述飞行器之间可拆卸连接;所述行走小车的四角均安装有麦克纳姆车轮;所述机器人安装在所述行走小车上;所述机器人包括底座部、身体部、头部和手臂部;底座部固定在所述行走小车顶面;所述身体部连接在所述底座部上,且能够实现竖向方向的伸
缩,以及水平面内的转动;所述头部转动连接在所述身体部顶端,所述头部顶端具有振动/温湿度传感器和gps定位系统,所述头部的耳部具有声音传感器,所述头部的眼部具有红外摄像仪;所述手臂部的数量为两个,且分别连接在所述身体部的两侧,且用于存储及注射润滑油;所述控制系统安装在所述行走小车和所述机器人内部,用于实现机器人的动作控制,以及外界信号的采集和传输;所述驱动系统包括对所述机器人进行操控的垂直旋转驱动系统、平面回转驱动系统、油泵驱动系统,以及用于实现所述机器人维护功能的功能模块。
10.所述地面总控系统包括地面监控中心,所述地面监控中心通过无线网络与所述旋翼飞行器和所述机器人的控制端连接;所述旋翼飞行器无线连接有飞行器操作显示屏,所述飞行器操作显示屏用于实现对所述旋翼飞行器的位置姿态修正和应急保护控制;所述机器人无线连接有维护操作及注油显示屏。
11.通过上述技术方案,本发明提供的无人机投放智能注油机器人采用地空协同作业方式,通过地面监控中心对旋翼飞行器和机器人进行无线控制,行走小车和机器人配合实现巡检和维护工作的装置,避免了人工攀爬天轮可能造成的安全事故,提高了摩擦提升机天轮维护的效率及运行安全性,实现了矿山摩擦式提升机的安全生产及减人增效,而且机器人具有多自由度,能够实现不同角度和位置的注油和维护巡检操作。
12.优选的,在上述一种无人机投放智能注油机器人中,所述控制系统包括探测部、控制部和电池;所述探测部包括与所述振动/温湿度传感器、所述声音传感器和所述红外摄像仪分别电性连接的数据处理器;所述数据处理器电性连接有交换机,所述交换机电性连接有无线终端,所述无线终端用于向地面传输采集信号;所述控制部包括分别与所述交换机和所述无线终端电性连接的电源稳压单元,所述电源稳压单元电性连接有控制单元,所述控制单元与所述数据处理器电性连接,所述控制单元与舵机的控制端电性连接,所述舵机用于实现对所述机器人的转动动作控制;所述电池与所述电源稳压单元电性连接。本发明通过振动/温湿度传感器、声音传感器和红外摄像仪的数据采集,能够对异常情况进行预警,巡检效果更好。
13.优选的,在上述一种无人机投放智能注油机器人中,所述底座部包括立柱和安装筒;所述立柱固定在所述行走小车的顶面,所述安装筒固定在所述立柱上,所述安装筒内安装有多级电动伸缩杆,所述多级电动伸缩杆的顶端与所述身体部转动连接。多级电动伸缩杆可以为三级伸缩结构,能够实现身体部的高度调节,适应性更强。
14.优选的,在上述一种无人机投放智能注油机器人中,所述手臂部包括连接臂、伸缩臂和注射臂;所述连接臂固定在所述身体部的侧壁上;所述伸缩臂一端与所述连接臂铰接;所述注射臂的一端与所述伸缩臂的另一端铰接,所述注射臂的另一端用于注射润滑油。手臂部的铰接结构能够使其自由度更多,且伸缩臂可以进一步提高接触范围,使用效果更好。
15.优选的,在上述一种无人机投放智能注油机器人中,所述注射臂包括外筒体、注射头和内活塞;所述外筒体一端与所述伸缩臂铰接;所述注射头连接在所述外筒体的另一端,且与所述外筒体内部连通;所述内活塞安装在所述外筒体内部,且与所述外筒体和所述注射头之间形成用于容纳润滑油的腔室。本发明通过活塞注射方式实现润滑油的注入,控制效果更好。能够进一步提高注射精度。
16.优选的,在上述一种无人机投放智能注油机器人中,所述注射头的侧壁安装有针孔摄像头。
17.优选的,在上述一种无人机投放智能注油机器人中,所述外筒体上具有注油口,所述注油口上安装有油塞;所述外筒体上具有观察窗口;所述外筒体与所述注射头的连接端面上具有环绕所述注射头的led灯。以上结构的增加能够进一步提高机器人的使用性能。
18.优选的,在上述一种无人机投放智能注油机器人中,所述机器人的手臂部上还安装有吸尘抽吸头和油漆喷头。能够根据需求对天轮进行相应的维护。
19.优选的,在上述一种无人机投放智能注油机器人中,所述行走小车的顶面固定有两个摄像机;两个所述摄像机分别布置在所述机器人的前方和后方;所述摄像机与所述控制系统电性连接。能够辅助行走小车的前后行走的路况探测。
20.本发明还提供了一种无人机投放智能注油方法,采用上述的一种提升机天轮注油机器人,具体包括以下步骤:
21.s1、所述旋翼飞行器按任务路径携带所述行走小车和所述机器人飞行;
22.s2、通过所述振动/温湿度传感器、所述声音传感器、所述红外摄像仪和所述摄像机进行数字和图像数据采集;
23.s3、控制系统进行数字和图像数据处理,判断是否存在异常情况并报警,并将数据传输至所述地面监控中心进行存储;
24.s4、通过所述旋翼飞行器将所述行走小车和所述机器人运抵到位,并释放行走小车,使得行走小车带动机器人进行巡检和注油操作。
25.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种无人机投放智能注油机器人,具有以下有益效果:
26.1、本发明提供的无人机投放智能注油机器人采用地空协同作业方式,通过地面监控中心对旋翼飞行器和机器人进行无线控制,行走小车和机器人配合实现巡检和维护工作的装置,避免了人工攀爬天轮可能造成的安全事故,提高了摩擦提升机天轮维护的效率及运行安全性,实现了矿山摩擦式提升机的安全生产及减人增效,而且机器人具有多自由度,能够实现不同角度和位置的注油和维护巡检操作。
27.2、本发明提供的机器人解决了现有技术中人工注油和维护方法危险程度高、难度大,费时费力缺陷等缺陷。
28.3、本发明提供的机器人解决了现有自动加油和维护技术中效果和效率均不佳的技术问题。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
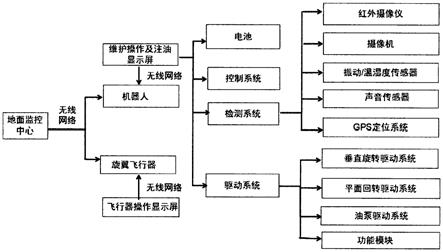
30.图1附图为本发明提供的无人机投放智能注油机器人的系统控制图;
31.图2附图为本发明提供的实施例1的无人机投放智能注油机器人的结构示意图;
32.图3附图为本发明提供的控制系统的方框图;
33.图4附图为本发明提供的行走小车和机器人结构的示意图;
34.图5附图为本发明提供的手臂部的结构示意图;
35.图6附图为本发明提供的注射头的结构示意图;
36.图7附图为本发明提供的巡检的流程图;
37.图8附图为本发明提供的实施例2的无人机投放智能注油机器人的结构示意图。
38.其中:
39.1-旋翼飞行器;
40.2-行走小车;
41.21-把手;
42.3-机器人;
43.31-底座部;311-立柱;312-安装筒;32-身体部;33-头部;331-振动/温湿度传感器;332-声音传感器;333-红外摄像仪;34-手臂部;341-连接臂;342-伸缩臂;343-注射臂;3431-外筒体;3432-注射头;3433-针孔摄像头;3434-油塞;3435-观察窗口;3436-led灯;
44.4-控制系统;
45.41-探测部;411-数据处理器;412-交换机;413-无线终端;42-控制部;421-电源稳压单元;422-控制单元;423-舵机;43-电池;
46.5-麦克纳姆车轮;
47.6-摄像机;
48.7-挂装件;
49.71-弯杆;72-电动挂钩;
50.8-箱体;
51.81-铰接门;
52.9-电动挂钩。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.参见附图1至附图6,本发明实施例公开了一种无人机投放智能注油机器人,包括飞行执行系统和地面总控系统:
55.飞行执行系统包括旋翼飞行器1、行走小车2、机器人3、控制系统4和驱动系统;行走小车2与飞行器1之间可拆卸连接;行走小车2的四角均安装有麦克纳姆车轮5;机器人3安装在行走小车2上;机器人3包括底座部31、身体部32、头部33和手臂部34;底座部31固定在行走小车2顶面;身体部32连接在底座部31上,且能够实现竖向方向的伸缩,以及水平面内的转动;头部33转动连接在身体部32顶端,头部33顶端具有振动/温湿度传感器331和gps定位系统,头部33的耳部具有声音传感器332,头部33的眼部具有红外摄像仪333;手臂部34的数量为两个,且分别连接在身体部32的两侧,且用于存储及注射润滑油;控制系统4安装在行走小车2和机器人3内部,用于实现机器人3的动作控制,以及外界信号的采集和传输;驱动系统包括对机器人3进行操控的垂直旋转驱动系统、平面回转驱动系统、油泵驱动系统,以及用于实现机器人3维护功能的功能模块。
56.地面总控系统包括地面监控中心,地面监控中心通过无线网络与旋翼飞行器1和机器人3的控制端连接;旋翼飞行器1无线连接有飞行器操作显示屏,飞行器操作显示屏用于实现对旋翼飞行器1的位置姿态修正和应急保护控制;机器人3无线连接有维护操作及注油显示屏。
57.为了进一步优化上述技术方案,控制系统4包括探测部41、控制部42和电池43;探测部41包括与振动/温湿度传感器331、声音传感器332和红外摄像仪333分别电性连接的数据处理器411;数据处理器411电性连接有交换机412,交换机412电性连接有无线终端413,无线终端413用于向地面传输采集信号;控制部42包括分别与交换机412和无线终端413电性连接的电源稳压单元421,电源稳压单元421电性连接有控制单元422,控制单元422与数据处理器411电性连接,控制单元422与舵机423的控制端电性连接,舵机423用于实现对机器人3的转动动作控制;电池43与电源稳压单元421电性连接。
58.为了进一步优化上述技术方案,底座部31包括立柱311和安装筒312;立柱311固定在行走小车2的顶面,安装筒312固定在立柱311上,安装筒312内安装有多级电动伸缩杆,多级电动伸缩杆的顶端与身体部32转动连接。
59.为了进一步优化上述技术方案,手臂部34包括连接臂341、伸缩臂342和注射臂343;连接臂341固定在身体部32的侧壁上;伸缩臂342一端与连接臂341铰接;注射臂343的一端与伸缩臂342的另一端铰接,注射臂343的另一端用于注射润滑油。
60.为了进一步优化上述技术方案,注射臂343包括外筒体3431、注射头3432和内活塞;外筒体3431一端与伸缩臂342铰接;注射头3431连接在外筒体3431的另一端,且与外筒体3431内部连通;内活塞安装在外筒体3431内部,且与外筒体3431和注射头3432之间形成用于容纳润滑油的腔室。
61.为了进一步优化上述技术方案,注射头3432的侧壁安装有针孔摄像头3433。
62.为了进一步优化上述技术方案,外筒体3431上具有注油口,注油口上安装有油塞3434;外筒体3431上具有观察窗口3435;外筒体3431与注射头3432的连接端面上具有环绕注射头3432的led灯3436。
63.为了进一步优化上述技术方案,功能模块包括安装机器人3的手臂部34上的吸尘抽吸头和油漆喷头。
64.为了进一步优化上述技术方案,行走小车2的顶面固定有两个摄像机6;两个摄像机6分别布置在机器人3的前方和后方;摄像机6与控制系统4电性连接。
65.参见附图7,本发明提供的无人机投放智能注油方法,采用上述的一种提升机天轮注油机器人,具体包括以下步骤:
66.s1、旋翼飞行器1按任务路径携带行走小车2和机器人3飞行;
67.s2、通过振动/温湿度传感器331、声音传感器332、红外摄像仪333和摄像机6进行数字和图像数据采集;
68.s3、控制系统4进行数字和图像数据处理,判断是否存在异常情况并报警,并将数据传输至地面监控中心进行存储;
69.s4、通过旋翼飞行器1将行走小车2和机器人3运抵到位,并释放行走小车2,使得行走小车2带动机器人3进行巡检和注油操作。
70.实施例1:
71.参见附图2,行走小车2通过挂装件7与旋翼飞行器1连接,且位于旋翼飞行器1下方,挂装件7的数量为四个,且均包括弯杆71和电动挂钩72;弯杆71顶端与旋翼飞行器1的底面固定;电动挂钩72固定在弯杆71底端,且与行走小车2边沿挂接。行走小车2的前后外壁固定有把手21,电动挂钩72挂接在把手21上。
72.实施例2:
73.参见附图8,还包括箱体8;箱体8为矩形箱体结构,箱体8的外顶壁通过电动挂钩9与旋翼飞行器1的底面连接,箱体8的一侧壁为铰接门81,行走小车2置于箱体8内部,且位于箱体8的内底面上。
74.铰接门81的底沿与箱体8的底壁边沿铰接,铰接门81的顶沿与箱体8顶壁通过电动开关扣合。箱体8内侧安装有用于控制铰接门81开关的液压缸。
75.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
76.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1