一种应用于太空物资运输和装配的绳索牵引机器人
1.本发明涉及一种绳索牵引机器人,具体涉及一种应用于太空物资运输和装配的绳索牵引机器人。
背景技术:
2.目前,几乎所有航天器都是在地面完成制造和验证后,再通过运载火箭送入预定轨道运行。随着空间探索需求的不断提高,快速增长的航天器规模和缓慢增加的运载火箭有效载荷的体积和重量之间的矛盾日益凸显。大型可展开机构是解决上述矛盾的有效方法,但展开口径、重量和力学特性等方面仍无法满足未来大型或者超大型空间结构体的发展需求。因此,基于“模块化可展开机构+在轨装配”的建造理念已成为国内大型、超大型航天器设计和建造的技术共识。
3.将较小的模块化可展开结构通过空间机器人在轨装配形成百米或千米量级的超大型航天器,涉及几十次乃至上百次运载火箭发射、在轨对接和停靠,再通过空间机器人将运载火箭携带的物资转运至作业点,进而辅助可展开结构从折叠状态展开、对接形成完整的航天器。
4.为了转移和装配物资,国内外学者提出了多种解决转移和装配物资的方式,如:1、基于桁架的移动基座机器人,该基座机器人的运动灵活性较差,仅适合建造规模较小的桁架结构或桁架结构中较小的模块。2、攀爬式移动装配机器人则比较适合组装工作,但由于每次需要往返进行运输,运输效率较低。3、自主展开结构的大型桁架建造技术的展开尺寸有限,重量利用率较低。
5.综上所述,现有太空物资的运输和装配装置存在转运距离有限和运输效率低的问题。
技术实现要素:
6.本发明的目的是为了解决现有太空物资的运输和装配装置存在转运距离有限和运输效率低的问题。进而提供一种应用于太空物资运输和装配的绳索牵引机器人。
7.本发明的技术方案是:一种应用于太空物资运输和装配的绳索牵引机器人,包括支撑结构、移动底座、多个牵引机构、多根牵引绳、升降机构、对接夹持机构和底板,支撑结构为框架结构,支撑结构布置在太空失重的空间内,支撑结构上不位于同一条直线上的至少三个点安装有一个牵引机构,每根牵引绳的一端与一个牵引机构连接,每根牵引绳的另一端与位于支撑结构中部的移动底座连接,多根牵引绳在牵引机构的作用下带动移动底座进行移动,升降机构安装在移动底座的下端面上,底板与升降机构的下部连接,对接夹持机构安装在底板的下端面上,对接夹持机构夹持装配机器人,移动底座通过升降机构和对接夹持机构来安装机器人,实现对物资的运输和装配。
8.本发明与现有技术相比具有以下效果:
9.1、本发明的绳索牵引机器人,利用了空间环境无重力的特点,机器人的移动底座
在支撑结构的支撑作用下以及不少于3个牵引机构和牵引绳的拉力协同作用下,在牵引机构的牵引绳拉直时组成的平面范围内连续运动,运行平稳;对接支持机构能够在升降机构的带动下在机器人底座垂直方向运动;对接支持机构能够实现与被转运物体对接,从而实现在三维空间内大范围转运建造物资和设备。进而解决了超大型航天器的建造物资从运载火箭的停靠点高效平稳地转移至作业点的问题。
10.2、本发明利用多吊点绳索牵引机器人实现建造物资大范围、高效机动,无需任何燃料,移动运动速度快,整个多吊点绳索牵引机器人结构简单,加工成本低、构建难度小的问题。
附图说明
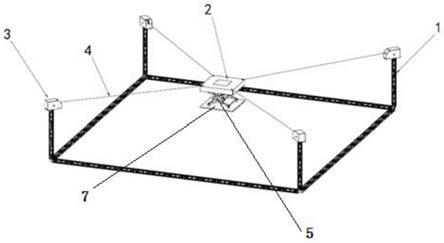
11.图1是本发明的整体结构示意图,图2是本发明升降机构与机器人底座和对接夹持机构示意图。
12.具体实施方
13.具体实施方式一:结合图1至图2说明本实施方式,本实施方式的一种应用于太空物资运输和装配的绳索牵引机器人包括支撑结构1、移动底座2、多个牵引机构3、多根牵引绳4、升降机构5、对接夹持机构6和底板7,支撑结构1为框架结构,支撑结构1布置在太空失重的空间内,支撑结构1上不位于同一条直线上的至少三个点安装有一个牵引机构3,每根牵引绳4的一端与一个牵引机构3连接,每根牵引绳4的另一端与位于支撑结构1中部的移动底座2连接,多根牵引绳4在牵引机构3的作用下带动移动底座2进行移动,升降机构5安装在移动底座2的下端面上,底板7与升降机构5的下部连接,对接夹持机构6安装在底板7的下端面上,对接夹持机构6夹持装配机器人,移动底座2通过升降机构5和对接夹持机构6来安装机器人,实现对物资的运输和装配。
14.本实施方式的移动底座2有效的利用了太空空间内无重力的特点,通过绳索牵引实现二维平面的大范围运动,通过固定于移动底座2的升降机构5带动对接夹持机构6实现垂直于基座(指底板7)平面运动,从而能够实现运输物资、装配设备等大范围三维运动。
15.本发明属于空间机器人领域,旨在解决百米、千米量级大型及超大型空间结构在轨装配过程中物资和设备的高效、平稳运输等问题。
16.本实施方式的牵引机构3能够实现牵引绳4的收拢和释放。
17.具体实施方式二:结合图1说明本实施方式,本实施方式的牵引绳4为钢丝绳或具有导电功能的线缆。如此设置,便于通过牵引绳4传输电力为机器人底座及其他设备供电。其它组成和连接关系与具体实施方式一相同。
18.本实施方式的牵引绳4能够实现机器人底座2和支撑结构1间的电力传输。
19.具体实施方式三:结合图1至图2说明本实施方式,本实施方式还包括对接夹持机构6,对接夹持机构6安装在底板7的下端面上,对接夹持机构6夹持装配机器人。如此设置,用来夹持具有精密对接装配的机器人。其它组成和连接关系与具体实施方式一或二相同。
20.具体实施方式四:结合图1至图2说明本实施方式,本实施方式的对接夹持机构6为三爪夹持机构。如此设置,与装配机器人快速连接。其它组成和连接关系与具体实施方式一至三中任意一项相同。
21.具体实施方式五:结合图1说明本实施方式,本实施方式的支撑结构1为三角形框
架或矩形框架。如此设置,使用灵活。其它组成和连接关系与具体实施方式一至四中任意一项相同。
22.具体实施方式六:结合图1说明本实施方式,本实施方式的三角形框架为等腰三角形框架。如此设置,便于保证太空物资运输的稳定性和可靠性。其它组成和连接关系与具体实施方式一至五中任意一项相同。
23.具体实施方式七:结合图1说明本实施方式,本实施方式的牵引机构3为卷扬机。如此设置,便于实现对牵引绳的收放。其它组成和连接关系与具体实施方式一至六中任意一项相同。
24.结合图1至图2说明本发明的工作原理:
25.本发明的支撑结构1以金属桁架给出示例,其也可以是其他金属或非金属材料组成的支撑类结构;牵引机构3以及牵引绳4由卷扬机和钢丝绳给出示例,牵引绳4也可以是其他具有导电功能的线缆。所述移动底座2具有与牵引绳4连接的接口,具有与升降机构5的连接结构,该接口应具有机械结构的连接、电气回路的连接以及信号回路的连接;
26.移动底座2以金属箱体给出示例,其内部由控制器、电源转换电路、传感器等其他可拓展电路组成。
27.升降机构5以多连杆伸缩结构为例给出了实施方式示意,其也可以是套筒、齿轮齿条、弹簧等多种方式;所述升降机构5通过电动推杆的驱动实现升降;
28.对接夹持机构6以三爪夹持机构为例给出示意,其也可以是其他用于对接的主动和被动接口;所述对接夹持机构6以电动推杆的驱动实现打开闭合。
29.如图1、图2所示,本实施例中包括由长方形金属晶格式桁架组成的支撑结构1,由卷扬机组成的牵引装置3,钢丝绳4,由具有足够收纳空间和机械强度的金属箱体组成的移动底座2、多连杆升降机构5和三爪夹持机构6.
30.在工作准备阶段,四根钢丝绳应施加好适当的预紧力,由底座上的力传感器进行控制,对接夹持机构应当根据工作性质连接相应的机器人,当进行运输工作时,连接机器人应具有对所运输物品的夹持和释放功能,当进行装配工作时,连接机器人应具有想应的装配功能。
31.工作过程描述:当控制指令放出后,由移动底座箱体中的控制器所接收,控制器根据控制指令和相应传感器的反馈信息通过规划轨迹来控制卷扬机的收拢,多连杆伸缩机构的电动推杆的升降从而达到目标位置,并通过所连接机器人进行相应工作。
32.以上所述仅对本发明的优选实施例进行了描述,但本发明并不局限于上述具体实施方式,本领域的技术人员在本发明的启示之下,在不脱离发明宗旨下,对本发明的特征和实施例进行的各种修改或等同替换以适应具体情况均不会脱离本发明的精神和权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1