一种X型四旋翼可变结构无人机
一种x型四旋翼可变结构无人机
技术领域
1.本发明属于四旋翼无人机技术领域,具体涉及一种x型四旋翼可变结构无人机。
背景技术:
2.随着航空工业的迅速发展,无人机逐渐得到更加广泛的应用,同时各大领域都对飞行器的功能与性能提出了更高的要求。
3.传统的小型定轴距旋翼无人机行进过程中,在识别到窄间距树丛、洞穴等障碍时,一般需要悬停并重新规划形式路径,且规划后的路径往往需要完全绕过障碍区域,增加行进路程,耗费大量时间与电力。
4.可变结构无人机能够通过结构的切换适应狭窄复杂的地形,节约了无人机遇到障碍物而重新规划路径所需的算力,避免了无人机在规划路径过程中悬停与计算数据带来的电力损耗;并且避免了无人机因避障增加的行进路程,大大提升了无人机在狭窄空间、复杂地形下无人机的穿梭的能力。
技术实现要素:
5.本发明的目的在于提高狭窄复杂地形下无人机的穿梭能力,提供一种x型四旋翼可变结构无人机,在遇到障碍时,通过无人机中心体下方的步进电机,控制折纸拮抗机构带动四个机臂同步收缩,切换飞行状态为收缩状态从而便于穿越障碍,在穿越障碍后同样可通过步进电机控制折纸拮抗机构带动四个机臂同步伸展,使无人机恢复展开状态,大大提升了复杂地形下无人机的穿梭的能力。同时控制系统简单且机臂伸缩可保持同步,只需一个步进电机的转动,即可通过传动机构控制四个机臂实现同步伸缩。
6.本发明的一种x型四旋翼可变结构无人机由可伸缩机臂组a、控制组件b、折纸拮抗组件c、传动组件d和中心体组件e组成,其中可伸缩机臂组a由可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4组成,可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4的结构相同,均由滑轨1、滑臂2、驱动电机3、桨叶对4、螺母5组成;控制组件b由电机盒16、步进电机17、卷线轴19和驱动绳20组成;折纸拮抗组件c由顶板25、后板ⅰ29、后板ⅱ30、右板ⅰ35、右板ⅱ33、前板ⅰ39、前板ⅱ40、底板43、左板ⅰ47、左板ⅱ45、后支撑板51、前支撑板54、上弹簧56、下弹簧58组成;传动组件d由传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d、连接架64、内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c和内嵌轴ⅳ65d组成;中心体组件e由中心板ⅰ71、中心板ⅱ72、中心板ⅲ73、支撑螺柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c组成;中心板ⅰ71、可伸缩机臂组件ⅰa1,可伸缩机臂组件ⅱa2,可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4,中心板ⅱ72、控制组件b、中心板ⅲ73、折纸拮抗组件c、传动组件d自上而下顺序排列,其中可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4的内端上面,分别固接于中心板ⅰ71的四角下面;可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4的内端下面,分别固接于中心板ⅱ72的上面;控制组件b、支撑螺
柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c呈正方形排列,其上下两端分别与中心板ⅱ72和中心板ⅲ73固接,控制组件b位于中心板ⅲ73的前部;折纸拮抗组件c的顶板25固接于中心板ⅲ73下面;折纸拮抗组件c的底板43固接于传动组件d的连接架64上面;控制组件b的驱动绳20从卷线轴19穿过进孔ⅵ77,穿过进孔ⅰ27,经过进孔ⅱ28进入折纸拮抗组件c,穿过走线槽ⅰ57绕折纸拮抗组件c的后支撑板51外侧一周,驱动绳20的拉紧将使α1变小,即将后支撑板51拉向右板ⅱ33;驱动绳20绕后支撑板51外侧一周后经过出孔ⅰ31,穿过出孔ⅱ32穿出折纸拮抗组件c,穿过出孔
ⅴ
67在连接架64下端绕过,穿过进孔
ⅴ
68,穿过进孔ⅳ42,经进孔ⅲ41再次进入折纸拮抗组件c,穿过走线槽ⅱ59绕折纸拮抗组件c的前支撑板54外侧一周,驱动绳20的拉紧将使α2变小,即将前支撑板54拉向左板ⅱ45,驱动绳20绕后支撑板51外侧一周后经过出孔ⅳ38,穿过出孔ⅲ37,穿过出孔ⅵ76绕回卷线轴19,形成闭环;传动组件d的传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d近外端的四个孔
ⅴ
70经四个销轴分别与可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4的四个带孔滑臂2的四个孔对15铰接。
7.所述的可伸缩机臂组a中的滑轨1设有限位凹槽9、左卡扣组11、滑动轨道12、右卡扣组13、左行程极限14a、右行程极限14b、孔对15;滑臂2设有限位筋8、定位柱10;驱动电机3设有输出轴ⅰ6、轴肩ⅰ7,滑轨1和滑臂2滑动连接,滑轨1的限位筋8和滑臂2的限位凹槽9间隙配合,实现了滑臂2的限位;定位柱10与滑动轨道12间隙配合,确保滑臂2在滑轨1上能够一定程度上自由滑动,定位柱10在滑动轨道12的有效滑动长度d为20mm~30mm,即左行程极限14a到右行程极限14b的距离,当无人机处于伸展状态时,滑臂2上的定位柱10滑至左行程极限14a,与滑轨1的左卡扣组11内侧平面相切,实现精确定位,无人机处于收缩状态时,滑臂2上的定位柱10滑至右行程极限14b,与滑轨1的左卡扣组11内侧平面相切,实现精确定位,且卡扣组前端凸起处限制的宽度窄于定位柱10的滑动所需的最小轨道宽度,防止无人机飞行状态下由于振动、冲击等外部因素导致定位柱10脱出行程极限,导致滑臂2与滑轨1产生不可控的相对滑动;在定位柱10处于左行程极限14a、右行程极限14b时,定位柱10与左卡扣组11、右卡扣组13内侧平面相切;驱动电机3固接于滑臂2外端上面,驱动电机3上部中心设有输出轴ⅰ6;桨叶对4与输出轴ⅰ6过盈配合,经轴肩ⅰ7实现轴向与径向限位;螺母5与电机3螺纹连接。
8.所述的控制组件b中的电机盒16设有孔ⅰ21、孔ⅱ22、孔ⅲ23;步进电机17后端设有输出轴ⅱ18、轴肩ⅱ24;卷线轴19设有卷线槽19a;步进电机17装于电机盒16内;输出轴ⅱ18后端固接卷线轴19,并由轴肩ⅱ24限位;驱动绳20套于卷线槽19a中。
9.所述的折纸拮抗组件c中的顶板25分别与后板ⅰ29、右板ⅰ35、前板ⅰ39、左板ⅰ47上端铰接;后板ⅰ29和后板ⅱ30上下排列并铰接;右板ⅰ35位于右板ⅱ33前上方,下端与右板ⅱ33铰接;前板ⅰ39和前板ⅱ40上下排列并铰接;左板ⅰ47位于左板ⅱ45后上方,下端与左板ⅱ45铰接;底板43分别与后板ⅱ30、右板ⅱ33、前板ⅱ40、左板ⅱ45下端铰接;后支撑板51与右板ⅱ33铰接,后支撑板51与右板ⅱ33沿铰接处角度α1为0
°
~90
°
;前支撑板54与左板ⅱ45铰接,前支撑板54与左板ⅱ45沿铰接处角度α2为0
°
~90
°
;α1与α2的差值满足|α1-α2|≤4
°
;左板ⅱ45和右板ⅱ33与顶板25、后板ⅰ29、后板ⅱ30、前板ⅰ39、前板ⅱ40之间无直接接触。顶板25为正方形,设有孔组ⅱ26、进孔ⅰ27、出孔ⅲ37;后板ⅰ29内嵌磁扣ⅵ62,后板ⅱ30内嵌磁扣ⅰ49,右板ⅰ35上端设有进孔ⅱ28、中部设有定位扣ⅰ36;右板ⅱ33下端设有出孔ⅰ31、下部设
有定位扣ⅱ34;前板ⅰ39内嵌磁扣
ⅷ
61,前板ⅱ40内嵌磁扣ⅲ52;底板43为正方形,左右两边设有出孔ⅱ32和进孔ⅳ42、中心部设有孔组ⅲ44;左板ⅰ47上端设有出孔ⅳ38、中部设有定位扣ⅳ48;左板ⅱ45下端设有进孔ⅲ41、下部设有定位扣ⅲ46;后支撑板51设有磁扣ⅱ50、磁扣
ⅴ
55、走线槽ⅰ57;前支撑板54近下端右前面设有磁扣ⅳ53、下部设有走线槽ⅱ59、近上端右前面设有磁扣ⅶ60;上弹簧56右端经定位扣ⅱ34与右板ⅰ35固接,上弹簧56左端经定位扣ⅳ48与左板ⅰ47固接;下弹簧58右端经定位扣ⅰ36与右板ⅱ33固接,下弹簧58左端经定位扣ⅲ46与左板ⅱ45固接;无人机需要处于伸展状态时,驱动绳20卷动收紧,拉动后支撑板51贴紧右板ⅱ33,使α1=0
°
,同步拉动前支撑板54贴紧左板ⅱ45,使α2=0
°
,同步拉动底板43,使折纸拮抗组件c折叠;无人机需要处于折叠状态时,驱动绳20反向卷动,上弹簧56和下弹簧58提供拉力,使折纸拮抗组件c展开,使底板43向下运动,同时后板ⅱ30的磁扣ⅰ49与后支撑板51磁扣ⅱ50、后支撑板51的磁扣
ⅴ
55与后板ⅰ29的磁扣ⅵ62吸附,后支撑板51与后板ⅰ29、后板ⅱ30固接,支撑结构保持伸展状态;同时前板ⅱ40的磁扣ⅲ52与前支撑板54的磁扣ⅳ53、前支撑板54的磁扣ⅶ60与前板ⅰ39的磁扣
ⅷ
61吸附,由此前支撑板54与前板ⅰ39、前板ⅱ40固接,增强结构的稳定性,支撑结构保持伸展状态。
10.所述的传动组件d中的连接架64呈四方形,四方形边缘设有内嵌孔ⅰ66a、内嵌孔ⅱ66b、内嵌孔ⅲ66c、内嵌孔ⅳ66d;四方形中部左右对称设有出孔
ⅴ
67、进孔
ⅴ
68;传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d结构相同,其近内端均设有孔ⅳ69,其近外端均设有孔
ⅴ
70;内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c、内嵌轴ⅳ65d分别内嵌于内嵌孔ⅰ66a、内嵌孔ⅱ66b、内嵌孔ⅲ66c、内嵌孔ⅳ66d中;传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d各自的近内端与内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c和内嵌轴ⅳ65d中点处铰接。
11.所述的中心体组件e中的中心板ⅰ71、中心板ⅱ72、中心板ⅲ73自上而下顺序排列;中心板ⅱ72设有孔ⅵ75、孔组
ⅸ
70;中心板ⅲ73设有出孔ⅵ76、进孔ⅵ77、孔ⅶ78、孔
ⅷ
79;支撑螺柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c位于中心板ⅱ72和中心板ⅲ73之间,且上下两端分别与中心板ⅱ72和中心板ⅲ73螺纹连接。
12.本发明的工作过程:
13.本发明主要通过无人机中心处步进电机控制机构伸缩控制无人机飞行姿态的切换:
14.当无人机传感器判定前方地形需要无人机伸展,或地面站发送伸展指令时,控制组件b的步进电机17工作驱动输出轴ⅱ18正转,带动卷线轴19同步转动,驱动绳20卷动收紧,拉动后支撑板51贴紧右板ⅱ33,使α1=0
°
,同步拉动前支撑板54贴紧左板ⅱ45,使α2=0
°
,同步拉起底板43和连接架64,使折纸拮抗组件c折叠,并带动传动杆ⅰ、传动杆ⅱ、传动杆ⅲ、传动杆ⅳ推动滑臂2,使滑臂2的定位柱10滑到滑轨1的左行程极限14a,使可伸缩机臂组a精确伸展至预定伸展状态,无人机完成伸展。
15.在伸展状态,步进电机17的输出轴ⅱ18保持相应位置状态,持续提供拉力拉紧驱动绳20,避免上弹簧56、下弹簧58提供的拉力使折纸拮抗组件c伸展,导致可伸缩机臂组a意外收缩。
16.当无人机传感器判定前方地形需要无人机收缩,或地面站发送收缩指令时,控制组件b的步进电机17工作驱动输出轴ⅱ18反转,带动卷线轴19同步反向转动,驱动绳20反向
卷动释放驱动绳20提供的拉力,上弹簧56提供拉力拉动右板ⅰ35和左板ⅰ47向内收拢,下弹簧58提供拉力拉动右板ⅱ33和左板ⅱ45向内收拢,使折纸拮抗组件c展开,使底板43向下运动,同时后板ⅱ30的磁扣ⅰ49与后支撑板51磁扣ⅱ50、后支撑板51的磁扣
ⅴ
55与后板ⅰ29的磁扣ⅵ62吸附,当驱动绳20的拉力低于磁扣间吸力时,后支撑板51与后板ⅰ29、后板ⅱ30保持固接,支撑结构保持伸展,同时前板ⅱ40的磁扣ⅲ52与前支撑板54的磁扣ⅳ53、前支撑板54的磁扣ⅶ60与前板ⅰ39的磁扣
ⅷ
61吸附,当驱动绳20的拉力低于磁扣间吸力时,前支撑板54与前板ⅰ39、前板ⅱ40固接,结构的稳定性得到增强,支撑折纸拮抗组件c伸展,推动连接架64向下运动,带动动杆ⅰ、传动杆ⅱ、传动杆ⅲ、传动杆ⅳ拉动滑臂2,使滑臂2的定位柱10滑到滑轨1的右行程极限14b,使可伸缩机臂组a精确收缩至预定收缩状态,无人机完成收缩。
17.本发明与现有技术相比具有以下优点和有益效果:
18.1.机臂伸缩机构结构简单稳定。
19.2.控制系统简单,且易于实现机臂的同步伸缩,可靠性强。
20.3.滑轨设有两组卡扣,便于机臂伸展与收缩状态的精准定位,确保伸展与收缩两种状态下无人机的轴距是精确且可控的。
附图说明
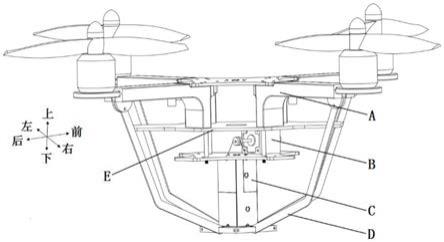
21.图1为x型四旋翼可变结构无人机的整体结构示意图;
22.图2为x型四旋翼可变结构无人机的具体机构拆分图;
23.图3为可伸缩机臂组a的结构示意图;
24.图4为可伸缩机臂组a的仰视图;
25.图5为可伸缩机臂组a的剖视图;
26.图6为控制组件b的结构示意图;
27.图7为控制组件b的剖视图;
28.图8为折纸拮抗组件c的正面结构示意图;
29.图9为折纸拮抗组件c的背面结构示意图;
30.图10为折纸拮抗组件c的俯视剖视图;
31.图11为折纸拮抗组件c的后视剖视图;
32.图12为前支撑板54的结构示意图;
33.图13为折纸拮抗组件c的仰视剖视图;
34.图14为传动组件d的结构示意图;
35.图15为传动组件d的俯视剖视图;
36.图16为传动杆ⅰ63a的结构示意图;
37.图17为中心体组件e的结构及位置示意图;
38.图18为中心板ⅱ72的结构示意图;
39.图19为中心板ⅲ73的结构示意图;
40.图20为无人机伸展状态的结构示意图;
41.其中:a.可伸缩机臂组 a1.可伸缩机臂组件
ⅰꢀ
a2.可伸缩机臂组件
ⅱꢀ
a3.可伸缩机臂组件
ⅲꢀ
a4.可伸缩机臂组件
ⅳꢀ
b.控制组件 c.折纸拮抗组件 d.传动组件 e.中心体
组件 1.滑轨 2.滑臂 3.驱动电机 4.桨叶对 5.螺母 6.输出轴
ⅰꢀ
7.轴肩
ⅰꢀ
8.限位筋 9.限位凹槽 10.定位柱 11.左卡扣组 12.滑动轨道 13.右卡扣组 14a.左行程极限 14b.右行程极限 15.孔对 16.电机盒 17.步进电机 18.输出轴
ⅱꢀ
19.卷线轴 19a.卷线槽 20.驱动绳 21.孔
ⅰꢀ
22.孔
ⅱꢀ
23.孔
ⅲꢀ
24.轴肩
ⅱꢀ
25.顶板 26.孔组
ⅱꢀ
27.进孔
ⅰꢀ
28.进孔
ⅱꢀ
29.后板
ⅰꢀ
30.后板
ⅱꢀ
31.出孔
ⅰꢀ
32.出孔
ⅱꢀ
33.右板
ⅱꢀ
34.定位扣
ⅱꢀ
35.右板
ⅰꢀ
36.定位扣
ⅰꢀ
37.出孔
ⅲꢀ
38.出孔
ⅳꢀ
39.前板
ⅰꢀ
40.前板
ⅱꢀ
41.进孔
ⅲꢀ
42.进孔
ⅳꢀ
43.底板 44.孔组
ⅲꢀ
45.左板
ⅱꢀ
46.定位扣
ⅲꢀ
47.左板
ⅰꢀ
48.定位扣
ⅳꢀ
49.磁扣
ⅰꢀ
50.磁扣
ⅱꢀ
51.后支撑板 52.磁扣
ⅲꢀ
53.磁扣
ⅳꢀ
54.前支撑板 55.磁扣
ⅴꢀ
56.上弹簧 57.走线槽
ⅰꢀ
58.下弹簧 59.走线槽
ⅱꢀ
60.磁扣
ⅶꢀ
61.磁扣
ⅷꢀ
62.磁扣
ⅵꢀ
63a.传动杆
ⅰꢀ
63b.传动杆
ⅱꢀ
63c.传动杆
ⅲꢀ
63d.传动杆
ⅳꢀ
64.连接架 65a.内嵌轴
ⅰꢀ
65b.内嵌轴
ⅱꢀ
65c.内嵌轴
ⅲꢀ
65d.内嵌轴
ⅳꢀ
66a.内嵌孔
ⅰꢀ
66b.内嵌孔
ⅱꢀ
66c.内嵌孔
ⅲꢀ
66d.内嵌孔
ⅳꢀ
67.出孔
ⅴꢀ
68.进孔
ⅴꢀ
69.孔
ⅳꢀ
70.孔
ⅴꢀ
71.中心板
ⅰꢀ
72.中心板
ⅱꢀ
73.中心板
ⅲꢀ
74a.支撑螺柱
ⅰꢀ
74b.支撑螺柱
ⅱꢀ
74c.支撑螺柱
ⅲꢀ
75.孔
ⅵꢀ
76.出孔
ⅵꢀ
77.进孔
ⅵꢀ
78.孔
ⅶꢀ
79.孔
ⅷ
。
具体实施方式
42.下面结合附图对本发明进行描述。
43.如图1和图2所示,本发明由可伸缩机臂组a、控制组件b、折纸拮抗组件c、传动组件d和中心体组件e组成,其中可伸缩机臂组a由可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4组成,可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4的结构相同,均由滑轨1、滑臂2、驱动电机3、桨叶对4、螺母5组成;控制组件b由电机盒16、步进电机17、卷线轴19和驱动绳20组成;折纸拮抗组件c由顶板25、后板ⅰ29、后板ⅱ30、右板ⅰ35、右板ⅱ33、前板ⅰ39、前板ⅱ40、底板43、左板ⅰ47、左板ⅱ45、后支撑板51、前支撑板54、上弹簧56、下弹簧58组成;传动组件d由传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d、连接架64、内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c和内嵌轴ⅳ65d组成;中心体组件e由中心板ⅰ71、中心板ⅱ72、中心板ⅲ73、支撑螺柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c组成;中心板ⅰ71、可伸缩机臂组件ⅰa1,可伸缩机臂组件ⅱa2,可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4,中心板ⅱ72、控制组件b、中心板ⅲ73、折纸拮抗组件c、传动组件d自上而下顺序排列,其中可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4的内端上面,分别固接于中心板ⅰ71的四角下面;可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3和可伸缩机臂组件ⅳa4的内端下面,分别固接于中心板ⅱ72的上面;控制组件b、支撑螺柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c呈正方形排列,其上下两端分别与中心板ⅱ72和中心板ⅲ73固接,控制组件b位于中心板ⅲ73的前部;折纸拮抗组件c的顶板25固接于中心板ⅲ73下面;折纸拮抗组件c的底板43固接于传动组件d的连接架64上面;控制组件b的驱动绳20从卷线轴19穿过进孔ⅵ77,穿过进孔ⅰ27,经过进孔ⅱ28进入折纸拮抗组件c,穿过走线槽ⅰ57绕折纸拮抗组件c的后支撑板51外侧一周,驱动绳20的拉紧将使α1变小,即将后支撑板51拉向右板ⅱ33;驱动绳20绕后支撑板51外侧一周后经过出孔ⅰ31,穿过出孔ⅱ32穿出折纸拮抗组件c,穿过出孔
ⅴ
67在连接架64下端绕过,穿过进孔
ⅴ
68,穿过进孔ⅳ42,经进孔ⅲ41再次进入折纸拮抗组件c,穿过走线槽ⅱ59绕折纸拮抗组件c的前支撑板54外侧一周,驱动绳20的拉紧
将使α2变小,即将前支撑板54拉向左板ⅱ45,驱动绳20绕后支撑板51外侧一周后经过出孔ⅳ38,穿过出孔ⅲ37,穿过出孔ⅵ76绕回卷线轴19,形成闭环;传动组件d的传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d近外端的四个孔
ⅴ
70经四个销轴分别与可伸缩机臂组件ⅰa1、可伸缩机臂组件ⅱa2、可伸缩机臂组件ⅲa3、可伸缩机臂组件ⅳa4的四个带孔滑臂2的四个孔对15铰接。
44.如图3至图5所示,所述的可伸缩机臂组a中的滑轨1设有限位凹槽9、左卡扣组11、滑动轨道12、右卡扣组13、左行程极限14a、右行程极限14b、孔对15;滑臂2设有限位筋8、定位柱10;驱动电机3设有输出轴ⅰ6、轴肩ⅰ7,滑轨1和滑臂2滑动连接,滑轨1的限位筋8和滑臂2的限位凹槽9间隙配合,实现了滑臂2的限位;定位柱10与滑动轨道12间隙配合,确保滑臂2在滑轨1上能够一定程度上自由滑动,定位柱10在滑动轨道12的有效滑动长度d为20mm~30mm,即左行程极限14a到右行程极限14b的距离,当无人机处于伸展状态时,滑臂2上的定位柱10滑至左行程极限14a,与滑轨1的左卡扣组11内侧平面相切,实现精确定位,无人机处于收缩状态时,滑臂2上的定位柱10滑至右行程极限14b,与滑轨1的左卡扣组11内侧平面相切,实现精确定位,且卡扣组前端凸起处限制的宽度窄于定位柱10的滑动所需的最小轨道宽度,防止无人机飞行状态下由于振动、冲击等外部因素导致定位柱10脱出行程极限,导致滑臂2与滑轨1产生不可控的相对滑动;在定位柱10处于左行程极限14a、右行程极限14b时,定位柱10与左卡扣组11、右卡扣组13内侧平面相切;驱动电机3固接于滑臂2外端上面,驱动电机3上部中心设有输出轴ⅰ6;桨叶对4与输出轴ⅰ6过盈配合,经轴肩ⅰ7实现轴向与径向限位;螺母5与电机3螺纹连接。
45.如图6和图7所示,所述的控制组件b中的电机盒16设有孔ⅰ21、孔ⅱ22、孔ⅲ23;步进电机17后端设有输出轴ⅱ18、轴肩ⅱ24;卷线轴19设有卷线槽19a;步进电机17装于电机盒16内;输出轴ⅱ18后端固接卷线轴19,并由轴肩ⅱ24限位;驱动绳20套于卷线槽19a中。
46.如图8至图13所示,所述的折纸拮抗组件c中的顶板25分别与后板ⅰ29、右板ⅰ35、前板ⅰ39、左板ⅰ47上端铰接;后板ⅰ29和后板ⅱ30上下排列并铰接;右板ⅰ35位于右板ⅱ33前上方,下端与右板ⅱ33铰接;前板ⅰ39和前板ⅱ40上下排列并铰接;左板ⅰ47位于左板ⅱ45后上方,下端与左板ⅱ45铰接;底板43分别与后板ⅱ30、右板ⅱ33、前板ⅱ40、左板ⅱ45下端铰接;后支撑板51与右板ⅱ33铰接,后支撑板51与右板ⅱ33沿铰接处角度α1为0
°
~90
°
;前支撑板54与左板ⅱ45铰接,前支撑板54与左板ⅱ45沿铰接处角度α2为0
°
~90
°
;α1与α2的差值满足|α1-α2|≤4
°
;左板ⅱ45和右板ⅱ33与顶板25、后板ⅰ29、后板ⅱ30、前板ⅰ39、前板ⅱ40之间无直接接触。顶板25为正方形,设有孔组ⅱ26、进孔ⅰ27、出孔ⅲ37;后板ⅰ29内嵌磁扣ⅵ62,后板ⅱ30内嵌磁扣ⅰ49,右板ⅰ35上端设有进孔ⅱ28、中部设有定位扣ⅰ36;右板ⅱ33下端设有出孔ⅰ31、下部设有定位扣ⅱ34;前板ⅰ39内嵌磁扣
ⅷ
61,前板ⅱ40内嵌磁扣ⅲ52;底板43为正方形,左右两边设有出孔ⅱ32和进孔ⅳ42、中心部设有孔组ⅲ44;左板ⅰ47上端设有出孔ⅳ38、中部设有定位扣ⅳ48;左板ⅱ45下端设有进孔ⅲ41、下部设有定位扣ⅲ46;后支撑板51设有磁扣ⅱ50、磁扣
ⅴ
55、走线槽ⅰ57;前支撑板54近下端右前面设有磁扣ⅳ53、下部设有走线槽ⅱ59、近上端右前面设有磁扣ⅶ60;上弹簧56右端经定位扣ⅱ34与右板ⅰ35固接,上弹簧56左端经定位扣ⅳ48与左板ⅰ47固接;下弹簧58右端经定位扣ⅰ36与右板ⅱ33固接,下弹簧58左端经定位扣ⅲ46与左板ⅱ45固接;无人机需要处于伸展状态时,驱动绳20卷动收紧,拉动后支撑板51贴紧右板ⅱ33,使α1=0
°
,同步拉动前支撑板54贴紧左板ⅱ45,使α
2=0
°
,同步拉动底板43,使折纸拮抗组件c折叠;无人机需要处于折叠状态时,驱动绳20反向卷动,上弹簧56和下弹簧58提供拉力,使折纸拮抗组件c展开,使底板43向下运动,同时后板ⅱ30的磁扣ⅰ49与后支撑板51磁扣ⅱ50、后支撑板51的磁扣
ⅴ
55与后板ⅰ29的磁扣ⅵ62吸附,后支撑板51与后板ⅰ29、后板ⅱ30固接,支撑结构保持伸展状态;同时前板ⅱ40的磁扣ⅲ52与前支撑板54的磁扣ⅳ53、前支撑板54的磁扣ⅶ60与前板ⅰ39的磁扣
ⅷ
61吸附,由此前支撑板54与前板ⅰ39、前板ⅱ40固接,增强结构的稳定性,支撑结构保持伸展状态。
47.如图14至图16所示,所述的传动组件d中的连接架64呈四方形,四方形边缘设有内嵌孔ⅰ66a、内嵌孔ⅱ66b、内嵌孔ⅲ66c、内嵌孔ⅳ66d;四方形中部左右对称设有出孔
ⅴ
67、进孔
ⅴ
68;传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d结构相同,其近内端均设有孔ⅳ69,其近外端均设有孔
ⅴ
70;内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c、内嵌轴ⅳ65d分别内嵌于内嵌孔ⅰ66a、内嵌孔ⅱ66b、内嵌孔ⅲ66c、内嵌孔ⅳ66d中;传动杆ⅰ63a、传动杆ⅱ63b、传动杆ⅲ63c、传动杆ⅳ63d各自的近内端与内嵌轴ⅰ65a、内嵌轴ⅱ65b、内嵌轴ⅲ65c和内嵌轴ⅳ65d中点处铰接。
48.如图17至图19所示,所述的中心体组件e中的中心板ⅰ71、中心板ⅱ72、中心板ⅲ73自上而下顺序排列;中心板ⅱ72设有孔ⅵ75、孔组
ⅸ
70;中心板ⅲ73设有出孔ⅵ76、进孔ⅵ77、孔ⅶ78、孔
ⅷ
79;支撑螺柱ⅰ74a、支撑螺柱ⅱ74b和支撑螺柱ⅲ74c位于中心板ⅱ72和中心板ⅲ73之间,且上下两端分别与中心板ⅱ72和中心板ⅲ73螺纹连接。
49.当无人机传感器判定前方地形需要无人机伸展,或地面站发送伸展指令时,控制组件b的步进电机17工作驱动输出轴ⅱ18正转,带动卷线轴19同步转动,驱动绳20卷动收紧,拉动后支撑板51贴紧右板ⅱ33,使α1=0
°
,同步拉动前支撑板54贴紧左板ⅱ45,使α2=0
°
,同步拉起底板43和连接架64,使折纸拮抗组件c折叠,并带动传动杆ⅰ、传动杆ⅱ、传动杆ⅲ、传动杆ⅳ推动滑臂2,使滑臂2的定位柱10滑到滑轨1的左行程极限14a,使可伸缩机臂组a精确伸展至预定伸展状态,无人机完成伸展,如图20所示。
50.在伸展状态,步进电机17的输出轴ⅱ18保持相应位置状态,持续提供拉力拉紧驱动绳20,避免上弹簧56、下弹簧58提供的拉力使折纸拮抗组件c伸展,导致可伸缩机臂组a意外收缩。
51.当无人机传感器判定前方地形需要无人机收缩,或地面站发送收缩指令时,控制组件b的步进电机17工作驱动输出轴ⅱ18反转,带动卷线轴19同步反向转动,驱动绳20反向卷动释放驱动绳20提供的拉力,上弹簧56提供拉力拉动右板ⅰ35和左板ⅰ47向内收拢,下弹簧58提供拉力拉动右板ⅱ33和左板ⅱ45向内收拢,使折纸拮抗组件c展开,使底板43向下运动,同时后板ⅱ30的磁扣ⅰ49与后支撑板51磁扣ⅱ50、后支撑板51的磁扣
ⅴ
55与后板ⅰ29的磁扣ⅵ62吸附,当驱动绳20的拉力低于磁扣间吸力时,后支撑板51与后板ⅰ29、后板ⅱ30保持固接,支撑结构保持伸展,同时前板ⅱ40的磁扣ⅲ52与前支撑板54的磁扣ⅳ53、前支撑板54的磁扣ⅶ60与前板ⅰ39的磁扣
ⅷ
61吸附,当驱动绳20的拉力低于磁扣间吸力时,前支撑板54与前板ⅰ39、前板ⅱ40固接,结构的稳定性得到增强,支撑折纸拮抗组件c伸展,推动连接架64向下运动,带动动杆ⅰ、传动杆ⅱ、传动杆ⅲ、传动杆ⅳ拉动滑臂2,使滑臂2的定位柱10滑到滑轨1的右行程极限14b,使可伸缩机臂组a精确收缩至预定收缩状态,无人机完成收缩,如图1所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1