一种分布式电推进飞行器控制分配方法及装置
1.本发明涉及无人机控制分配技术领域,特别是涉及一种分布式电推进飞行器控制分配方法及装置。
背景技术:
2.电动飞机相比于传统油动飞机,具有高效率、低能耗的优点,并且由于电推进器可以实现零排放、低噪声,成为未来绿色航空的最优选择。分布式电推进飞行器由分布在机翼上的多个电动螺旋桨或涵道提供推力,是一种新概念飞行器,已经受到世界各国的关注,并取得了一定成果。分布式电推进飞机的主要特点是具有分布式推进器,通过合理的设计分布式推进器,可以利用推进—气动耦合效应改善飞机的气动特性,并结合推力矢量技术,实现飞行器的直接力控制,提供飞行器系统的鲁棒性和容错能力。分布式推进器系统利用电推进器的尺度独立性,使用多个小推进器代替大推进器,以提高设计的自由度,这在提高飞行器系统的气动性能和控制性能的同时,也增加了其控制分配的复杂性。
3.解决控制分配问题首先需要确定控制效能模型和约束条件。一般控制分配问题中考虑推进器的位置和速率约束,位置约束直接决定了推进系统的可达范围。
4.现有技术中的分布式电推进器设置时往往过于保守,需要设置较多或较大功率的推进器,造成飞行器的起飞重量较大,且飞行器在空中飞行时所需的推力较小,较大或较大功率的推进器反而成为了飞行器飞行的负担。
技术实现要素:
5.本发明的目的是:改进飞行器推力的控制分配方法,通过电机过载方法,提高飞行器起飞时的推力,降低推进器的数量或功率,降低飞行器的重量,使飞行器获得更好的飞行性能。
6.为了实现上述目的,本发明提供了一种分布式电推进飞行器控制分配方法,其特征在于,包括:
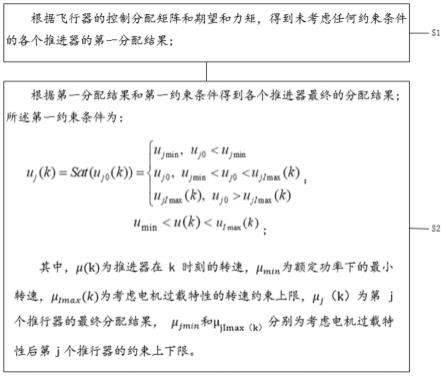
7.根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果;
8.根据第一分配结果和第一约束条件得到各个推进器最终的分配结果;所述第一约束条件为:
[0009][0010]umin
《u(k)《u
imax
(k);
[0011]
其中,μ(k)为推进器在k时刻的转速,μ
min
为额定功率下的最小转速,μ
imax
()为考虑电机过载特性的转速约束上限,μj(k)为第j个推行器的最终分配结果,μ
jmin
和μ
jimax(k)
分别
为考虑电机过载特性后第j个推行器的约束上下限。
[0012]
进一步的,在根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果之前,所述分配方法还包括:
[0013]
根据飞行器的控制效率矩阵,得到控制分配矩阵。
[0014]
进一步的,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为单一对象形态时,
[0015][0016][0017]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0018]
进一步的,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为批量对象形态时,
[0019][0020][0021]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0022]
进一步的,其特征在于,根据推进器的温度特性选择滑动窗口积分器的长度。
[0023]
进一步的,所述功率软约束的获取方法包括:
[0024]
对推进器电机进行静态测试,记录不同功率下电机的转速、推力和功率;获取推进器额定功率下的最大转速μ
max
以及推进器电机最大转速u
max
;
[0025]
根据静态测试得到的转速-推力-功率数据,确定电推进器的功率-转速系数、功率-推力系数和推力系数;
[0026]
根据第一公式得到功率软约束,所述第一公式为:
[0027][0028]
本发明还公开了一种分布式电推进飞行器控制分配装置,包括:第一分配模块和第二分配模块;
[0029]
所述第一分配模块,用于根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果;
[0030]
所述第二分配模块,用于根据第一分配结果和第一约束条件得到各个推进器最终的分配结果;所述第一约束条件为:
[0031][0032]umin
《u(k)《u
imax
(k);
[0033]
其中,μ(k)为推进器在k时刻的转速,μ
min
为额定功率下的最小转速,μ
imax
(k)为考虑电机过载特性的转速约束上限,πj(k)为第j个推行器的最终分配结果,π
jmin
和μ
jimax(k)
分别为考虑电机过载特性后第j个推行器的约束上下限。
[0034]
进一步的,分配装置还包括矩阵计算模块;
[0035]
所述矩阵计算模块,用于根据飞行器的控制效率矩阵,得到控制分配矩阵。
[0036]
进一步的,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为单一对象形态时,
[0037][0038][0039]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0040]
进一步的,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为批量对象形态时,
[0041][0042][0043]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0044]
本发明实施例一种分布式电推进飞行器控制分配方法及装置与现有技术相比,其有益效果在于:
[0045]
(1)本发明分布式电推进飞行器控制分配方法及装置,通过考虑电机过载特性扩展了电推进器的位置约束,充分发挥了电推进器的潜力,在相同的推进系统下,增大了飞行器所能产生控制力的可达范围。
[0046]
(2)飞行器的推进系统在进行短时间的机动动作和抵抗阵风干扰时需要提供较大控制力,而在长时间的巡航阶段只需要较以小的功率运行。采用本发明的分配方法和装置,可以选择更小的电推进器,降低飞机的起飞重量和无效体积,提高能量利用率。
附图说明
[0047]
图1是本发明一种分布式电推进飞行器控制分配方法的流程示意图;
[0048]
图2是一种分布式电推进飞行器控制分配方法的试验实践流程图;
[0049]
图3是实施例中静态测试得到的转速-推力-功率数据;
[0050]
图4为本发明中滑动窗口积分器的示意图;
[0051]
图5为本发明与传统方法对期望力矩的分配结果对比图,
[0052]
图6为本发明与传统方法的瞬时可达力矩范围示意图。
[0053]
图7是本发明一种分布式电推进飞行器控制分配装置的结构示意图。
具体实施方式
[0054]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0055]
如图1所示,本发明公开了一种分布式电推进飞行器控制分配方法,包括:
[0056]
步骤s1,根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果;
[0057]
步骤s2,根据第一分配结果和第一约束条件得到各个推进器最终的分配结果;所述第一约束条件为:
[0058][0059]umin
《u(k)《u
imax
(k);
[0060]
其中,μ(k)为推进器在k时刻的转速,μ
min
为额定功率下的最小转速,μ
imax
(k)为考虑电机过载特性的转速约束上限,μj(k)为第j个推行器的最终分配结果,μ
jmin
和μ
jimax(k)
分别为考虑电机过载特性后第j个推行器的约束上下限。
[0061]
本领域技术人员可以直接将本发明的约束条件更新到飞行器中以扩展飞行器控制力的可达范围。
[0062]
在本实施例中,在根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果之前,所述分配方法还包括:
[0063]
根据飞行器的控制效率矩阵,得到控制分配矩阵。
[0064]
在本实施例中,本领域知晓分布式电推进飞行器内设置有控制器或处理器,控制器或处理器可以根据院校设置的控制效率矩阵得到相应的控制分配矩阵。
[0065]
对飞行器的控制效率矩阵b,有:
[0066]
bw(k)=v(k);
[0067]
其中,w(k)=[u1(k),u2(k),
…
,um(k)]
t
代表为飞机的m个电推进器分别的控制输入,v(k)=(τ
x
,τy,τz,t)为作用在飞机上的合力矩和总推力。对于分布式电推进飞机,上式是一个欠定方程组,具有无穷解。
[0068]
进行分配控制时,由外环控制器计算得到期望和力矩推力指令vd=(τ
xd
,τ
yd
,τ
zd
,
td),其中τ
x
,τy,τz分别表示三个方向的力矩,t表示总推力。v(k)=(τ
x
,τy,τz,t)为作用在飞机上的合力矩和总推力,称为虚拟控制力。vd(k)表示飞行过程中控制器给出的,期望的虚拟控制力。
[0069]
vd(k)为v(k)的一个特定输入。且当输入一个给定的期望力矩vd(k)时,可以求其最小二范数解得到:
[0070]
w0(k)=qvd(k);
[0071]
其中,q=b
t
(bb
t
)-1
为控制分配矩阵。w0(k)为未考虑任何约束条件的控制分配结果,有w0(k)=[u
10
(k),u
20
(k),
…
,u
m0
(k)]
t
。
[0072]
按照各个推进器的第一约束条件对w0(k)作截断,可以得到每个推进器的最终分配结果。所述第一约束条件包括:
[0073][0074]umin
《u(k)《u
imax
(k)。
[0075]
本领域技术人员知晓,现有技术中的电推进器的位置约束为:
[0076]umin
《u《u
max
;
[0077]
其中,u
max
是推进器在额定功率下运行的最大转速,本领域技术人员在设置位置约束时都采用此约束。这种约束方式会限制推进器的使用。
[0078]
发明人通过研究知晓,电推进器具有过载能力,可以在短时间以超过u
max
的转速运行,提供更大的瞬时控制力。过载能持续的时间与过载功率有关,若一定时间内的平均功率不超过p
sc
,就不会损坏电机,但其转速始终不能超过电机的最大工作转速u
max
。
[0079]
可以引入对功率的积分约束,并放宽原先的位置约束得到:
[0080][0081]
其中,i(k)为一个对功率的滑动窗口积分器,l为这一窗口的长度:
[0082][0083]
pm(k)为k时刻电机的功率,根据功率与转速的关系有:
[0084]
pm(k)=k
pw
u3(k);
[0085]
本发明中的滑动窗口积分器具有两种形态,即单一对象形态和批量对象形态。
[0086]
在单一对象形态下,滑动窗口积分器在每个控制周期更新一次,将当前的电机功率pm(k)加入积分器,同时减掉l步之前的电机功率pm(k-l)。单一对象形态滑动窗口积分器的更新公式为:
[0087]
i(k)=pm(k)+i(k-1)-pm(k-l);
[0088]
飞机的控制周期很短,一些情况下不需要,或受到硬件资源的限制不足以在每个
控制周期都更新约束条件,可以采用批量对象形态的滑动窗口积分器,其更新公式为:
[0089]
i(k)=i(k-1)+[pm(k)+pm(k+1)+
…
pm(k+p)]-[pm(k-l)+pm(k-l+1)+
…
pm(k-l+p)];
[0090]
其中,p表示每隔p个控制周期,更新一次积分约束条件。
[0091]
在本实施例中,当滑动窗口积分器为单一对象形态时,上述对功率的积分约束可以转换为:
[0092]
pm(k)≤l
·
p
sc
+pm(k-l)-i(k-1);
[0093]
根据功率与转速的关系,将对功率的约束转化为对转速的约束如下:
[0094][0095]
令表示考虑电机过载特性的转速约束上限。本方法控制分配问题的约束条件为:
[0096]umin
《u(k)《u
imax
(k)。
[0097]
在本实施例中,当滑动窗口积分器为批量对象形态时,上述对功率的积分约束可以转换为:
[0098]
pm(k)≤l
·
p
sc-[pm(k-p)+pm(k-p+1)+
…
pm(k-1)]+[pm(k-l-p)+pm(k-l-p+1)+
…
pm(k-l)]-i(k-1);或
[0099]
(两个式子是相同的);
[0100]
根据功率与转速的关系,将对功率的约束转化为对转速的约束如下:
[0101][0102]
令表示考虑电机过载特性的转速约束上限。最终本方法控制分配问题的约束条件为:
[0103]umin
《u(k)《u
imax
(k)。
[0104]
在本实施例中,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为单一对象形态时,
[0105][0106][0107]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口
积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0108]
在本实施例中,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为批量对象形态时,
[0109][0110][0111]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0112]
在本实施例中,根据推进器的温度特性选择滑动窗口积分器的长度。
[0113]
在本实施例中,测量电推进器的温度特性,根据温度特性选择合适的积分器窗口宽度lw。积分器的长度由电机的热时间常数和飞行器控制周期之间的比例决定。飞行器控制周期越短,电机温升速度越慢,窗口宽度lw越大,反之则越小。在实施中,飞行器控制周期为ts=0.02秒,窗口宽度取lw=50。
[0114]
在本实施例中,所述功率软约束的获取方法包括:
[0115]
对推进器电机进行静态测试,记录不同功率下电机的转速、推力和功率;获取推进器额定功率下的最大转速μ
max
以及推进器电机最大转速u
max
;
[0116]
根据静态测试得到的转速-推力-功率数据,确定电推进器的功率-转速系数、功率-推力系数和推力系数;
[0117]
根据第一公式得到功率软约束,所述第一公式为:
[0118][0119]
在本实施例中,进行电机静态测试,记录不同功率下电推进器的转速和推力,并测量电推进器额定功率下的最大转速u
max
,以及电机最大工作转速u
max
。其中u
max
称为位置软约束,u
max
称为位置硬约束。根据静态测试得到的转速-推力-功率数据,确定电推进器的功率-转速系数k
pw
,功率-推力系数k
pt
和推力系数c
t
。
[0120]
具体的测试过程包括:
[0121]
将电推进器安装在测试台上并上电,对电机输入阶跃形式的控制指令,待电机转速稳定后,记录其一段时间内的推力、功率及转速数据,并求最小二乘均值。阶跃信号的大小在10%至100%之间均匀选取。
[0122]
电推进器的功率与转速、功率与推力、以及推力与转速之间分别具有如下关系:
[0123]
p=k
pw
u3;
[0124][0125]
t=c
t
u2;
[0126]
采用测量结果对上式进行拟合,得到k
pw
,k
pt
和c
t
。则功率软约束p
sc
的值为:
[0127][0128]
参照图2的一种分布式电推进飞行器控制分配方法的试验实践流程图,以某种分布式电推进飞行器进行试验,具体试验数据如下:
[0129]
进行电机静态测试,记录不同功率下电推进器的转速和推力,并测量电推进器额定功率下的最大转速u
max
,以及电机最大工作转速u
max
。其中u
max
称为位置软约束,u
max
称为位置硬约束。实施例中测试的结果如下:
[0130]umax
=22620转/分钟;
[0131]umax
=27700转/分钟;
[0132]
根据静态测试得到的转速-推力-功率数据,确定电推进器的功率—转速系数k
pw
,功率—推力系数k
pt
和推力系数c
t
。实施例中的测试结果如图3所示,得到转速-推力-功率之间的系数为:
[0133]kpw
=9.494
×
10-12
;
[0134]kpt
=13.68;
[0135]ct
=7.818
×
10-9
;
[0136]
在实施中,飞行器控制周期为ts=0.02秒,窗口宽度取lw=50。
[0137]
将上述获取到的参数,更新到飞行器的约束条件中。初始化积分器,因为约束条件包含积分约束,所以积分约束通过一个滑动窗口积分器维护。滑动窗口积分器的示意图如图4所示。
[0138]
在积分器初始化过程中,令其中所有元素都为功率软约束p
sc
,含义是假设在初始状态下电推进器一直以额定功率运行,所以开始时的积分约束u
imax
=u
max
。
[0139]
根据分布式电推进飞行器的控制矩阵b,求其最小二范数解,得到分配矩阵q。在实施例中,控制效率矩阵为:
[0140][0141]
所以分配矩阵为:
[0142][0143]
对每一步控制分配,由外环控制器计算得到期望和力矩推力指令vd=(τ
xd
,τ
yd
,τ
zd
,td)。其中τ
x
,τy,τz分别表示三个方向的力矩,t表示总推力。vd由飞行器的反馈控制系统
结合飞机当前状态信息和驾驶员给出的指令实时计算得到。
[0144]
根据第一约束条件,计算控制分配问题对期望力矩的最小二乘解u如下:
[0145]
u(k)=qvd(k);
[0146]
由于飞行器飞行是一个连续的状态,当完成一次分配后,更新积分器状态,更新约束条件,以确定下一步控制分配问题的约束条件。
[0147]
以单一对象形态为例,更新积分器状态如下:
[0148]
i(k)=pm(k)+i(k-1)-pm(k-l);
[0149]
积分约束条件更新如下:
[0150][0151]
参照图5本发明与传统方法对期望力矩的分配结果对比图,参照图6本发明与传统方法的瞬时可达力矩范围示意图。可知本发明分布式电推进飞行器控制分配方法及装置,通过考虑电机过载特性扩展了电推进器的位置约束,充分发挥了电推进器的潜力,在相同的推进系统下,增大了飞行器所能产生控制力的可达范围。
[0152]
实施例2:
[0153]
本发明还公开了一种分布式电推进飞行器控制分配装置,包括:第一分配模块101和第二分配模块102。
[0154]
所述第一分配模块101,用于根据飞行器的控制分配矩阵和期望和力矩,得到未考虑任何约束条件的各个推进器的第一分配结果;
[0155]
所述第二分配模块102,用于根据第一分配结果和第一约束条件得到各个推进器最终的分配结果;所述第一约束条件为:
[0156][0157]umin
《u(k)《u
imax
(k);
[0158]
其中,μ(k)为推进器在k时刻的转速,μ
min
为额定功率下的最小转速,μ
imax
(k)为考虑电机过载特性的转速约束上限,μj(k)为第j个推行器的最终分配结果,μ
jmin
和μ
jimax(k)
分别为考虑电机过载特性后第j个推行器的约束上下限。
[0159]
在本实施例中,分配装置还包括矩阵计算模块;
[0160]
所述矩阵计算模块,用于根据飞行器的控制效率矩阵,得到控制分配矩阵。
[0161]
在本实施例中,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为单一对象形态时,
[0162]
[0163][0164]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0165]
在本实施例中,所述第一约束条件由一个滑动窗口积分器来维护,当滑动窗口积分器为批量对象形态时,
[0166][0167][0168]
其中,u
max
为推进器电机的最大转速,k
pw
为推进器的功率-转速系数,l为滑动窗口积分器的长度,p
sc
为功率软约束,μ为电机转速,k为时刻,μ
max
为推进器额定功率下的最大转速。
[0169]
本发明的实施例2是在实施例1的基础上进行撰写的,本领域技术人员可以参照实施例1所公开的技术内容,自行实施实施例2的技术方案。同时,实施例1中对技术方案的说明和限定同样可以应用到实施例2中,因此不再赘述。
[0170]
综上,本发明实施例提供一种分布式电推进飞行器控制分配方法及装置与现有技术相比,其有益效果在于:
[0171]
(1)本发明分布式电推进飞行器控制分配方法及装置,通过考虑电机过载特性扩展了电推进器的位置约束,充分发挥了电推进器的潜力,在相同的推进系统下,增大了飞行器所能产生控制力的可达范围。
[0172]
(2)飞行器的推进系统在进行短时间的机动动作和抵抗阵风干扰时需要提供较大控制力,而在长时间的巡航阶段只需要较以小的功率运行。采用本发明的分配方法和装置,可以选择更小的电推进器,降低飞机的起飞重量和无效体积,提高能量利用率。
[0173]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1