一种无人机遥感全地区测量移动平台的制作方法
1.本发明涉及无人机遥感全地区测量技术领域,具体为一种无人机遥感全地区测量移动平台。
背景技术:
2.无人机用传感器收集目标物的电磁波信息,经处理、分析后,识别目标物,揭示其几何、物理性质和相互关系及其变化规律的现代科学技术。换言之,即是“遥远的感知”,按传感器搭载平台划分,包括航天遥感、航空遥感、地面遥感。使用领域有自然灾害,如国家和地方灾情监测、预警、评估、应急救助指挥体系,民用领域等。
3.现有的无人机遥感全地区测量移动平台在使用过程中,影像记录清晰度容易受到镜面污垢的影响,导致影像记录模糊,以及驱动能源消耗,不便于补充,并且降落产生的碰撞,容易导致无人机损伤的缺点,故此,提供一种无人机遥感全地区测量移动平台。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种无人机遥感全地区测量移动平台,解决了上述背景技术中提出现有的无人机遥感全地区测量移动平台在使用过程中,影像记录清晰度容易受到镜面污垢的影响,导致影像记录模糊,以及驱动能源消耗,不便于补充,并且降落产生的碰撞,容易导致无人机损伤的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种无人机遥感全地区测量移动平台,包括无人机壳体、与设置在无人机壳体上的支撑缓冲机构、与设置在支撑缓冲机构上的云台,以及设置在云台上的cdd摄像头,所述无人机壳体上设有若干个横臂,每个所述横臂上设有带动电机,所述带动电机的输出端连接有螺旋桨叶,所述无人机壳体内设有无人机遥感控制系统,所述无人机壳体内还设有传动轴杆,所述传动轴杆穿出无人机壳体的一端设有辅助传动机构和分流机构,另一端连接有减速电机,所述减速电机的输入端连接有发电机,所述发电机通过螺栓固定在无人机壳体上。
6.可选的,所述辅助传动机构包括传动叶轮、限位套柱座、限位槽、限位插块、不锈钢弹簧片和凹槽,所述传动叶轮的两端分别嵌入有限位套柱座,所述限位套柱座内开设有若干个限位槽,每个所述限位槽内设有限位插块和不锈钢弹簧片,所述不锈钢弹簧片的一端嵌入固定在限位插块上,另一端嵌入在限位套柱座上,所述传动轴杆上还开设有若干个与限位插块相适配的凹槽。
7.可选的,所述分流机构包括固定轴杆、槽口、分流叶片、定位销杆、侧杆、固定销、滑槽和导向滑销,所述固定轴杆一体式固定在传动轴杆上,所述固定轴杆内设有与若干个槽口,所述固定轴杆上设有若干个与槽口相适配的分流叶片,所述分流叶片的端部穿设有定位销杆,所述分流叶片通过定位销杆活动连接在固定轴杆上。
8.可选的,所述固定轴杆与分流叶片之间设有侧杆,所述侧杆的两端均穿设有导向滑销,所述分流叶片内开设有与导向滑销相适配的滑槽,所述侧杆通过导向滑销活动连接
在固定轴杆上,另一个导向滑销穿过侧杆延伸入滑槽的内部,所述分流叶片上设有连接弹簧,所述连接弹簧的一端钩接在分流叶片上,另一端钩接在侧杆上。
9.可选的,所述支撑缓冲机构包括支撑基座架、侧腿底杆、连接销杆、滚轮、固定柱、支杆、腔槽、推块、推杆和橡胶球,所述支撑基座架通过螺栓固定在无人机壳体上,所述支撑基座架的端部设有侧腿底杆,所述支撑基座架与侧腿底杆之间穿设有连接销杆,所述侧腿底杆的端部活动连接有滚轮。
10.可选的,所述侧腿底杆上设有支杆,所述支撑基座架上设有固定柱,所述固定柱上开设有腔槽,所述腔槽连通橡胶球,所述腔槽内设有与腔槽相适配的推块,所述推块上设有推杆,所述推杆的一端固定在推块,另一端与支杆活动销接,所述支杆活动销接在侧腿底杆上。
11.可选的,所述辅助清洁机构包括腔盒、进气柱管、排气柱管、进气叶轮、气管、微型气泵、同轴板、喷管和喷孔,所述腔盒的两端分别连通进气柱管和排气柱管,所述腔盒内设有进气叶轮,所述进气叶轮套接在传动轴杆上,所述排气柱管连通气管,所述气管还连接有微型气泵和喷管。
12.可选的,所述云台上设有同轴板,所述同轴板与cdd摄像头同轴,所述喷管粘接固定在同轴板上,所述喷管上开设有喷孔。
13.可选的,所述无人机遥感控制系统包括主控芯片,以及与主控芯片连接的gps定位芯片、超声波测距仪和红外传感器,所述主控芯片的输出端连接有调速器,所述调速器的输出端连接有带动电机,所述带动电机与螺旋桨叶相连接。
14.可选的,所述主控芯片的输出端还连接有数据传输模块,所述数据传输模块的输出端连接有手机端,所述主控芯片与云台电连接,所述云台与cdd摄像头相连接。
15.本发明提供了一种无人机遥感全地区测量移动平台,具备以下有益效果:1、该无人机遥感全地区测量移动平台可将传动叶轮套接在传动轴杆上,并将限位套柱座分别嵌入在传动叶轮的两端,直至将限位套柱座推送至合适的位置,通过不锈钢弹簧片将限位插块推出限位槽的内部,使得限位插块嵌入凹槽的内部,从而能够有效的限制传动轴杆与限位套柱座的位置,并通过两个限位套柱座可限制传动叶轮的位置,可使得传动叶轮与传动轴杆同步转动,并通过传动轴杆带动减速电机和发电机转动,从而将机械能经电磁场转换为电能。
16.2、该无人机遥感全地区测量移动平台设置的传动轴杆通过定位销杆与分流叶片相连接,可将分流叶片与传动轴杆同步转动,分流叶片受到离心力的作用,可将分流叶片沿定位销杆的外部转动展开,并将分流叶片通过导向滑销拉动侧杆,使得侧杆一端的导向滑销沿滑槽的中轴线方向移动,并将侧杆的另一端沿另一个导向滑销同步转动,可增大无人机的悬浮能力,并可对气体分流,能够有效的减轻无人受到的阻力,并可通过连接弹簧可将侧杆调节至初始位置,将侧杆嵌入在传动轴杆的槽口内部,可用于收缩分流叶片。
17.3、该无人机遥感全地区测量移动平台降落时,可将滚轮相向移动,并将侧腿底杆沿连接销杆的外部转动,使得侧腿底杆通过支杆推动推杆移动,以及推杆与推块相连接,可将推块与推杆同步移动,可使得推块沿腔槽的内部,可将腔槽内部的气体排入至橡胶球的内部,通过推块的受阻气压,用于缓冲侧腿底杆收到的碰撞强度,并配合滚轮可用于减轻侧腿底杆受到磨损,以及分散侧腿底杆受到的碰撞,从而可为支撑基座架提供有效的缓冲处
理,以及橡胶球内部的气体可再导入腔槽的内部,气压可作用于推块,使得侧腿底杆通过支杆、推杆和推块的配合为无人机提供弹性支撑。
18.4、该无人机遥感全地区测量移动平台设置的进气叶轮固定套接在传动轴杆上,可将传动轴杆与进气叶轮同步转动,使得气体经进气柱管导入腔盒的内部,并配合进气叶轮可将气体经排气柱管导入气管的内部,以及气管与喷管相连通,可将气体经气管和喷管的配合通过喷孔喷射出,使得气体作用于cdd摄像头镜面,用于吹净摄像头镜面,从而能够有效的保持cdd摄像头镜面的清洁,使得cdd摄像头能够提供清洗的影像记录。
19.5、该无人机遥感全地区测量移动平台通过gps定位芯片可用于定位无人机的位置,超声波测距仪可用于测量无人机的飞行距离,以及红外传感器可用于检测障碍物,保证无人机的飞行安全,并可将检测数据通过数据传输模块传输至手机端,主控芯片可通过调速器控制带动电机带动螺旋桨叶的转速,主控芯片还可以通过云台调节cdd摄像头的转动角度。
附图说明
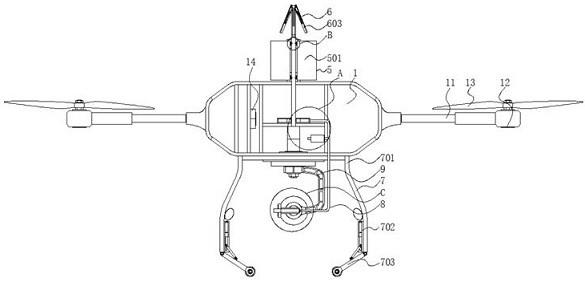
20.图1为本发明主视结构示意图;图2为本发明支撑缓冲机构的结构示意图;图3为本发明图1中c处局部放大结构示意图;图4为本发明图1中a处局部放大结构示意图;图5为本发明分流机构的结构示意图;图6为本发明传动叶轮的结构示意图;图7为本发明腔盒的结构示意图;图8为本发明图1中b处局部放大结构示意图;图9为本发明喷管与喷孔的结构示意图;图10为本发明无人机遥感控制系统的结构示意图。
21.图中:1、无人机壳体;2、传动轴杆;3、减速电机;4、发电机;5、辅助传动机构;501、传动叶轮;502、限位套柱座;503、限位槽;504、限位插块;505、不锈钢弹簧片;506、凹槽;6、分流机构;601、固定轴杆;602、槽口;603、分流叶片;604、定位销杆;605、侧杆;606、固定销;607、滑槽;608、导向滑销;609、连接弹簧;7、支撑缓冲机构;701、支撑基座架;702、侧腿底杆;703、连接销杆;704、滚轮;705、固定柱;706、支杆;707、腔槽;708、推块;709、推杆;710、橡胶球;8、辅助清洁机构;801、腔盒;802、进气柱管;803、排气柱管;804、进气叶轮;805、气管;806、微型气泵;807、同轴板;808、喷管;809、喷孔;9、云台;10、cdd摄像头;11、横臂;12、带动电机;13、螺旋桨叶;14、主控芯片;15、调速器;16、带动电机;17、gps定位芯片;18、超声波测距仪;19、红外传感器;20、数据传输模块;21、手机端。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为
基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
25.实施案例一如附图1所示,本发明提供一种技术方案:一种无人机遥感全地区测量移动平台,包括无人机壳体1、与设置在无人机壳体1上的支撑缓冲机构7、与设置在支撑缓冲机构7上的云台9,以及设置在云台9上的cdd摄像头10,无人机壳体1上设有若干个横臂11,每个横臂11上设有带动电机12,带动电机12的输出端连接有螺旋桨叶13,无人机壳体1内设有无人机遥感控制系统,无人机壳体1内还设有传动轴杆2,传动轴杆2穿出无人机壳体1的一端设有辅助传动机构5和分流机构6,另一端连接有减速电机3,减速电机3的输入端连接有发电机4,发电机4通过螺栓固定在无人机壳体1上。
26.实施例二下面结合具体的工作方式对实施例一中的方案进行进一步的介绍,详见下文描述:如图1、图6和图7所示,作为优选的实施方式,在上述方式的基础上,进一步的,辅助传动机构5包括传动叶轮501、限位套柱座502、限位槽503、限位插块504、不锈钢弹簧片505和凹槽506,传动叶轮501的两端分别嵌入有限位套柱座502,限位套柱座502内开设有若干个限位槽503,每个限位槽503内设有限位插块504和不锈钢弹簧片505,不锈钢弹簧片505的一端嵌入固定在限位插块504上,另一端嵌入在限位套柱座502上,传动轴杆2上还开设有若干个与限位插块504相适配的凹槽506,可将传动叶轮501套接在传动轴杆2上,并将限位套柱座502分别嵌入在传动叶轮501的两端,直至将限位套柱座502推送至合适的位置,通过不锈钢弹簧片505将限位插块504推出限位槽503的内部,使得限位插块504嵌入凹槽506的内部,从而能够有效的限制传动轴杆2与限位套柱座502的位置,并通过两个限位套柱座502可限制传动叶轮501的位置,可使得传动叶轮501与传动轴杆2同步转动,并通过传动轴杆2带动减速电机3和发电机4转动,从而将机械能经电磁场转换为电能。
27.如图1和图5所示,作为优选的实施方式,在上述方式的基础上,进一步的,分流机构6包括固定轴杆601、槽口602、分流叶片603、定位销杆604、侧杆605、固定销606、滑槽607和导向滑销608,固定轴杆601一体式固定在传动轴杆2上,固定轴杆601内设有与若干个槽口602,固定轴杆601上设有若干个与槽口602相适配的分流叶片603,分流叶片603的端部穿设有定位销杆604,分流叶片603通过定位销杆604活动连接在固定轴杆601上,固定轴杆601与分流叶片603之间设有侧杆605,侧杆605的两端均穿设有导向滑销608,分流叶片603内开设有与导向滑销608相适配的滑槽607,侧杆605通过导向滑销608活动连接在固定轴杆601上,另一个导向滑销608穿过侧杆605延伸入滑槽607的内部,分流叶片603上设有连接弹簧609,连接弹簧609的一端钩接在分流叶片603上,另一端钩接在侧杆605上,传动轴杆2通过
定位销杆604与分流叶片603相连接,可将分流叶片603与传动轴杆2同步转动,分流叶片603受到离心力的作用,可将分流叶片603沿定位销杆604的外部转动展开,并将分流叶片603通过导向滑销608拉动侧杆605,使得侧杆605一端的导向滑销608沿滑槽607的中轴线方向移动,并将侧杆605的另一端沿另一个导向滑销608同步转动,可增大无人机的悬浮能力,并可对气体分流,能够有效的减轻无人受到的阻力,并可通过连接弹簧609可将侧杆605调节至初始位置,将侧杆605嵌入在传动轴杆2的槽口602内部,可用于收缩分流叶片603。
28.如图1和图2所示,作为优选的实施方式,在上述方式的基础上,进一步的,支撑缓冲机构7包括支撑基座架701、侧腿底杆702、连接销杆703、滚轮704、固定柱705、支杆706、腔槽707、推块708、推杆709和橡胶球710,支撑基座架701通过螺栓固定在无人机壳体1上,支撑基座架701的端部设有侧腿底杆702,支撑基座架701与侧腿底杆702之间穿设有连接销杆703,侧腿底杆702的端部活动连接有滚轮704,侧腿底杆702上设有支杆706,支撑基座架701上设有固定柱705,固定柱705上开设有腔槽707,腔槽707连通橡胶球710,腔槽707内设有与腔槽707相适配的推块708,推块708上设有推杆709,推杆709的一端固定在推块708,另一端与支杆706活动销接,支杆706活动销接在侧腿底杆702上,无人机降落时,可将滚轮704相向移动,并将侧腿底杆702沿连接销杆703的外部转动,使得侧腿底杆702通过支杆706推动推杆709移动,以及推杆709与推块708相连接,可将推块708与推杆709同步移动,可使得推块708沿腔槽707的内部,可将腔槽707内部的气体排入至橡胶球710的内部,通过推块708的受阻气压,用于缓冲侧腿底杆702收到的碰撞强度,并配合滚轮704可用于减轻侧腿底杆702受到磨损,以及分散侧腿底杆702受到的碰撞,从而可为支撑基座架701提供有效的缓冲处理,以及橡胶球710内部的气体可再导入腔槽707的内部,气压可作用于推块708,使得侧腿底杆702通过支杆706、推杆709和推块708的配合为无人机提供弹性支撑。
29.如图1、图3、图4、图8和图9所示,作为优选的实施方式,在上述方式的基础上,进一步的,辅助清洁机构8包括腔盒801、进气柱管802、排气柱管803、进气叶轮804、气管805、微型气泵806、同轴板807、喷管808和喷孔809,腔盒801的两端分别连通进气柱管802和排气柱管803,腔盒801内设有进气叶轮804,进气叶轮804套接在传动轴杆2上,排气柱管803连通气管805,气管805还连接有微型气泵806和喷管808,云台9上设有同轴板807,同轴板807与cdd摄像头10同轴,喷管808粘接固定在同轴板807上,喷管808上开设有喷孔809,进气叶轮804固定套接在传动轴杆2上,可将传动轴杆2与进气叶轮804同步转动,使得气体经进气柱管802导入腔盒801的内部,并配合进气叶轮804可将气体经排气柱管803导入气管805的内部,以及气管805与喷管808相连通,可将气体经气管805和喷管808的配合通过喷孔809喷射出,使得气体作用于cdd摄像头10镜面,用于吹净摄像头10镜面,从而能够有效的保持cdd摄像头10镜面的清洁,使得cdd摄像头10能够提供清洗的影像记录。
30.如图1和图10所示,作为优选的实施方式,在上述方式的基础上,进一步的,无人机遥感控制系统包括主控芯片14,以及与主控芯片14连接的gps定位芯片17、超声波测距仪18和红外传感器19,主控芯片14的输出端连接有调速器15,调速器15的输出端连接有带动电机16,带动电机16与螺旋桨叶13相连接,主控芯片14的输出端还连接有数据传输模块20,数据传输模块20的输出端连接有手机端21,主控芯片14与云台9电连接,云台9与cdd摄像头10相连接,数据传输模块20为5g模块,通过gps定位芯片17可用于定位无人机的位置,超声波测距仪18可用于测量无人机的飞行距离,以及红外传感器19可用于检测障碍物,保证无人
机的飞行安全,并可将检测数据通过数据传输模块20传输至手机端21,主控芯片14可通过调速器15控制带动电机12带动螺旋桨叶13的转速,主控芯片14还可以通过云台9调节cdd摄像头10的转动角度。
31.综上,该无人机遥感全地区测量移动平台,使用时,首先,可将传动叶轮501套接在传动轴杆2上,并将限位套柱座502分别嵌入在传动叶轮501的两端,直至将限位套柱座502推送至合适的位置,通过不锈钢弹簧片505将限位插块504推出限位槽503的内部,使得限位插块504嵌入凹槽506的内部,从而能够有效的限制传动轴杆2与限位套柱座502的位置,并通过两个限位套柱座502可限制传动叶轮501的位置,可使得传动叶轮501与传动轴杆2同步转动,并通过传动轴杆2带动减速电机3和发电机4转动;其次,固定轴杆601一体式固定在传动轴杆2上,传动轴杆2通过定位销杆604与分流叶片603相连接,可将分流叶片603与传动轴杆2同步转动,分流叶片603受到离心力的作用,可将分流叶片603沿定位销杆604的外部转动展开,并将分流叶片603通过导向滑销608拉动侧杆605,使得侧杆605一端的导向滑销608沿滑槽607的中轴线方向移动,并将侧杆605的另一端沿另一个导向滑销608同步转动,可增大无人机的悬浮能力,并可对气体分流,同时,可将传动轴杆2与进气叶轮804同步转动,使得气体经进气柱管802导入腔盒801的内部,并配合进气叶轮804可将气体经排气柱管803导入气管805的内部,以及气管805与喷管808相连通,可将气体经气管805和喷管808的配合通过喷孔809喷射出,使得气体作用于cdd摄像头10镜面,用于吹净摄像头10镜面;然后,无人机降落时,可将滚轮704相向移动,并将侧腿底杆702沿连接销杆703的外部转动,使得侧腿底杆702通过支杆706推动推杆709移动,以及推杆709与推块708相连接,可将推块708与推杆709同步移动,可使得推块708沿腔槽707的内部,可将腔槽707内部的气体排入至橡胶球710的内部,通过推块708的受阻气压,用于缓冲侧腿底杆702收到的碰撞强度,并配合滚轮704可用于减轻侧腿底杆702受到磨损,以及分散侧腿底杆702受到的碰撞,从而可为支撑基座架701提供有效的缓冲处理,以及橡胶球710内部的气体可再导入腔槽707的内部,气压可作用于推块708,使得侧腿底杆702通过支杆706、推杆709和推块708的配合为无人机提供弹性支撑;最后,通过gps定位芯片17可用于定位无人机的位置,超声波测距仪18可用于测量无人机的飞行距离,以及红外传感器19可用于检测障碍物,保证无人机的飞行安全,并可将检测数据通过数据传输模块20传输至手机端21,主控芯片14可通过调速器15控制带动电机12带动螺旋桨叶13的转速,主控芯片14还可以通过云台9调节cdd摄像头10的转动角度。
32.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1