跳伞模拟训练器的制作方法
1.本发明涉及训练设备技术领域,具体涉及跳伞模拟训练器。
背景技术:
2.跳伞运动是指跳伞员乘飞机、气球等航空器或其他器械升至高空后跳下,或者从陡峭的山顶、高地上跳下,并借助空气动力和降落伞在张开降落伞之前和开伞后完成各种规定动作,并利用降落伞减缓下降速度在指定区域安全着陆的一项体育运动。
3.目前,已有跳伞训练设备一种为传统设备陈旧落后,无任何科技含量,纯属在地面靠喊口令模拟训练,其他训练设备只能用vr眼镜模拟高空跳伞环境,并且vr模拟训练价格高昂,不能让训练人员感到真正处在高空及着陆时的感受,做不到身临其境,从而降低了训练质量。基于此,我们提出跳伞模拟训练器。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的上述问题,提供跳伞模拟训练器,解决了现有跳伞训练设备价格昂贵且不能实现真正的跳伞时人体在高空及着陆时的真实感受,能增加参加训练人员心理素质,使训练人员在真正跳伞时能不害怕高空环境带来的紧张感,压迫感从而从容面对,完成跳伞,提高训练质量。
5.为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
6.跳伞模拟训练器,包括plc、走台、小车架和两组主梁,所述小车架位于两组主梁的上方,所述走台位于一组主梁的旁侧,所述小车架的前侧左右两端和后侧左右两端均设置有小车车轮,所述小车架每侧的两组小车车轮对应位于一组主梁上,所述小车架的右侧设置有与其相驱动配合的小车运行减速电机,所述小车架的前侧设置有回转电机;
7.所述主梁的下方设置有吊具,所述吊具的底部连接有伞带,所述伞带的上方装配有重力感应器,所述吊具的下方设置有四组拉绳操作棒;
8.所述小车架的顶部设置有起升装置。
9.优选地,所述走台远离主梁的一侧设置有栏杆。
10.优选地,所述吊具的顶部左侧前后两端和顶部右侧前后两端均固接有吊绳,所述左侧两组吊绳的顶部分别与对应的一组卷筒的外部两端相缠绕连接,所述右侧的两组吊绳的顶部分别与对应的另一组卷筒的外部两端相缠绕连接。
11.优选地,所述起升装置包括制动器和两组起身减速机,两组所述起身减速机分别在小车架的顶部一左一右并一后一前分布,两组所述起身减速机相互贴近的一侧均连接有卷筒,两组所述卷筒之间设置有起身电机,所述起身电机的两输出端分别与起身减速机对应相连接。
12.优选地,所述四组拉绳操作棒分别通过拉绳对应连接有拉绳传感器。
13.优选地,所述四组拉绳操作棒中的两组分别位于人体胸前左侧和右侧位置,所述四组拉绳操作棒中的另外两组分别位于人体的左侧和右侧位置。
14.综上所述,本发明包括以下至少一种有益效果:本技术可以在模拟中实现跳伞训练时提高空中出仓姿势、身体姿势的正确度。通过设备的起升装置及控制系统,使身体真正处于空中模式,进行前进、左旋、右旋,停止及加速前进等动作,并有真实的着陆动作,真正身临其境的感受压迫感及紧张感,增强了训练质量,杜绝了实操过程的突发情况。
附图说明
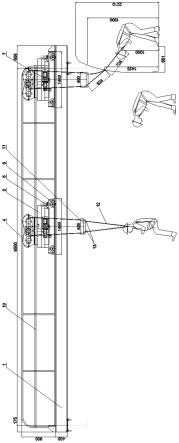
15.图1为本发明的使用状态结构示意图一;
16.图2为本发明的使用状态结构示意图二;
17.图3为本发明的图1的右视图;
18.图4为本发明的图2的俯视图;
19.图5为本发明的动力系统原理图一;
20.图6为本发明的动力系统原理图二;
21.图7为本发明的动力系统原理图三;
22.图8为本发明的控制系统原理图一;
23.图9为本发明的控制系统原理图二;
24.图10为本发明的plc控制原理图一;
25.图11为本发明的plc控制原理图二;
26.图12为本发明的plc控制原理图三;
27.图13为本发明的plc控制原理图四;
28.图14为本发明的plc控制原理图五;
29.图15为本发明的变频器系统原理图一;
30.图16为本发明的变频器系统原理图二;
31.图17为本发明的变频器系统原理图三;
32.图18为本发明的变频器系统原理图四;
33.附图中,各标号所代表的部件列表如下:
34.1-主梁,2-走台,3-小车架,4-起身减速机,5-小车运行减速电机,6-小车车轮,7-回转电机,8-卷筒,9-起身电机,10-栏杆,11-吊具,12-伞带,13-重力感应器,14-拉绳操作棒。
具体实施方式
35.以下结合附图1-18对本发明作进一步详细说明。
36.本发明提供的一种实施例:跳伞模拟训练器,包括变频plc、走台2、小车架3和两组主梁1,小车架3位于两组主梁1的上方,走台2位于一组主梁1的旁侧,走台2远离主梁1的一侧设置有栏杆10,便于对人员在走台2上行走时的安全防护;小车架3的前侧左右两端和后侧左右两端均设置有小车车轮6,小车架3每侧的两组小车车轮6对应位于一组主梁1上,小车架3的右侧设置有与其相驱动配合的小车运行减速电机5,小车架3的前侧设置有回转电机7,主梁1的下方设置有吊具11,吊具11的底部连接有与人体相配合使用的伞带12,伞带12的上方装配有重力感应器13,吊具11的下方设置有四组拉绳操作棒14,四组拉绳操作棒14分别通过拉绳对应连接有拉绳传感器,四组拉绳操作棒14中的两组分别位于人体胸前左侧
和右侧位置,四组拉绳操作棒14中的另外两组分别位于人体的左侧和右侧位置,训练人员操作左右两侧的拉绳操作棒14,plc接到指令从而便于实现左右旋转。
37.小车架3的顶部设置有起升装置,所述起升装置包括制动器和两组起身减速机4,两组起身减速机4分别在小车架3的顶部一左一右并一后一前分布,两组起身减速机4相互贴近的一侧均连接有卷筒8,两组卷筒8之间设置有起身电机9,起身电机9的两输出端分别与起身减速机4对应相连接,下落动作由起升装置实现,设置为自动模式。
38.吊具11的顶部左侧前后两端和顶部右侧前后两端均固接有吊绳,左侧两组吊绳的顶部分别与对应的一组卷筒8的外部两端相缠绕连接,右侧的两组吊绳的顶部分别与对应的另一组卷筒8的外部两端相缠绕连接,通过两组卷筒8同步对四组吊绳进行缠绕收缩和回旋放长,从而便于对吊具11进行上下移动。
39.在主梁1的承重下,利用起升装置,安全可靠多触点的配置(吊具11上与吊绳连接的四个吊点)有效实现了上升和下降,使训练模拟器实现跳伞训练时的高空训练环节,让人体真正感受空中运作,真正做到身临其境。该配置中吊具11的上下及旋转均由plc准确、精密的进行操作。
40.自由落体时指训练人员跳出训练舱时起升装置跟随人员下降,此时钢丝绳不受力,训练人员处于自由落体状态。当训练开始时运行机构会一直处于前进和下落状态,此动作设置为默认自动状态。左旋、右旋,停止,加速前进等动作由训练人员根据教官口令操作左右两侧拉绳操作棒14及胸前两个拉绳操作棒14来实现各个动作,拉左侧的拉绳操作棒14为左旋,拉右侧的拉绳操作棒14为右旋,左右两个拉绳操作棒14一块下拉可以实现减速,两个拉绳操作棒14拉到极限位置实现停止前进动作,实现悬停;左右移动由胸前两个拉绳操作棒14实现,拉胸前左侧拉绳操作棒14为左移,拉胸前右侧拉绳操作棒14为右移,同时拉下胸前两个拉绳操作棒14可以实现加速前进动作。在训练人员快要着陆时,系统有自动减速设置,保证训练人员有时间做出着陆动作等待着陆。综上,跳伞训练时的自由落体,前进、左旋、右旋,停止,加速前进及着陆等动作都可以完美模拟。
41.模拟出舱跳机动作时有防勒紧程序(现有技术),避免背带系统不合适,引起身体损伤,且防止多次训练强度大时对训练人员造成潜伏在伤害。并配备全自动操作,半自动和手动操作三种模式可自由切换。各安全装置(一、高度限制器:旋限位和重锤限位;二、置限制器:光测距和机械限位;三、重量限制器)均为双安全保护,确保训练人员安全,全自动系统有自动纠错功能防止长时间运行后各功能出现偏差,保证设备正常运行。并配有自动纠错功能,防止长期运行出现数据偏差。
42.本发明的工作原理(具体实施方式):
43.本发明通过高空跳台和一套运行及起升装置实现跳伞中的跳出机舱,下落,前进,后退,左移,右移,左旋,右旋,加速,减速,悬停等完整的跳伞训练动作,各运行工作零部件均采用变频plc控制,可以实现自动,半自动,手动三种模式切换。
44.常规训练为半自动模式,伞带12上方装配重力感应器13,当训练人员出仓处于悬空状态后,通过重力感应器13启动常规训练模式,此时前进和下落两个动作均为自动模式,与真实跳伞感受一样,并且有一个瞬间加速下落过程然后通过减速模拟开伞,使训练人员有真实的开伞感受,并配有防摇措施(注:为了确保模拟器在过程中的稳定性,为其设计有防摇摆技术,这种技术有三大明显的特点,一个是稳,能有效的有效减少人体在空中操作过
程中的摇摆;另一个是快,有助于提高设备的工作效率;还有一个则是准,指的是有助于设备实现定位。通过在吊具上设置多个吊点,并使每个吊点之间有相互作用力从而达到当吊具受力时减少其受力实现将摇晃力量减小或者抵消。),防止训练人员跳出时动作过大在空中摇摆不止发生危险。
45.此后在下降和前进过程中根据教练员口令进行各动作操作,手动操作完全复制各伞带功能,在右侧和左侧各配有一个拉绳操作棒14通过拉绳连接拉绳传感器,当拉动右侧拉绳操作棒14时,拉绳传感器发出指令至plc实现右旋动作,停止拉绳动作同时右旋动作停止,左侧同理,当同时拉动左右两个拉绳操作棒14时根据拉绳运行长度可以控制减速及停止前进。
46.前面两个伞带连接两个拉绳传感器控制左移右移及加速前进动作,拉左侧伞带实现左移动作,拉右侧伞带实现右移动作,同时拉动两个伞带实现向前加速动作,在各动作完成落地时与真实的落地感受一样。并配有自动纠错功能,防止长期运行出现数据偏差。
47.以上均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1