一种固体矢量推力器多余配额控制方法及装置与流程
1.本发明涉及固体姿控动力系统技术领域,特别涉及一种固体矢量推力器多余配额控制方法及装置。
背景技术:
2.采用固体推进剂产生的燃气作为工质,具有体积小、常压贮存、免维护等优势,其压强高、推力大,同等空间结构模式条件下可实现飞行器的大姿态变轨。但固体推进剂燃烧不能调控,推力器各阀门变化将引起系统压强巨大的波动,极易引起系统结构破坏,推力性能偏差过大,系统不能正常工作。
3.同时,相关技术中,在俯仰、偏航和滚转通道进行推力输出时,通常出现一个通道执行力有最大限制的情况,至少一个通道会收到人为限制,导致不能达到最大推力的问题。
技术实现要素:
4.本发明实施例提供一种固体矢量推力器多余配额控制方法及装置,在保证系统压强稳定的同时实现指定通道推力按要求输出,提高系统控制精度。
5.一方面,本发明提供了一种固体矢量推力器多余配额控制方法,其特征在于,所述固体矢量推力器包括多个推力器阀门,所述多个推力器阀门的输入端共用燃发器通道,所述多个推力器阀门的输出推力用于实现飞行器姿控,所述控制方法包括步骤:
6.根据俯仰、偏航及滚转通道所需推力分配各通道对应推力器阀门的阀门开度,并使工作时所述多个推力器阀门的阀门开度之和为定值;
7.引入多余配额调整每个通道的等效喉径,以保证至少一个通道对应的推力器阀门的阀门开度满足所需推力;
8.根据所述阀门开度控制对应推力器阀门的输出推力。
9.一些实施例中,所述根据俯仰、偏航及滚转通道所需推力分配各通道对应推力器阀门的阀门开度,包括步骤:
10.根据第一公式组计算所述阀门开度;
11.所述第一公式组包括:
12.b1—b3=δ
13
,
13.b2a—b4a=δ
24a
,
14.b2b—b4b=δ
24b
,
15.其中,δ
13
为俯仰通道所需的推力,δ24a为偏航通道所需的推力,δ24b为滚转通道所需的推力,b1、b2a、b2b、b3、b4a、b4b分别对应为推力器阀门1、2a、2b、3、4a、4b的阀门开度,且推力器阀门1和推力器阀门3的输出推力作用于俯仰通道,推力器阀门2a和推力器阀门4a的输出推力作用于偏航通道,推力器阀门2b和推力器阀门4b的输出推力作用于滚转通道。
16.一些实施例中,所述使工作时所述多个推力器阀门的阀门开度之和为定值,包括步骤:
17.根据第二公式组计算所述阀门开度;
18.所述第二公式组包括:
19.s_δ
sum
=(1e-18+|δ
13
|+|δ
24a
|+|δ
24b
|),
20.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
),
21.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
),
22.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
),
23.其中,s_δ
sum
为推力需求总量。
24.一些实施例中,引入多余配额调整每个通道的总喉径截面,以保证至少一个通道对应的推力器阀门的阀门开度满足所需推力,包括步骤:
25.引入多余配额分配量参数,所述多余配额分配量参数满足:cbs=max(ca-|δ
13
|-|δ
24a
|-|δ
24b
|,0),其中,ca为系统推力预设阈值;
26.将所述多余配额分配量参数与所述第二公式组结合计算所述阀门开度。
27.一些实施例中,将所述多余配额分配量参数与所述第二公式组结合计算所述阀门开度,包括步骤:
28.根据第三公式组计算所述阀门开度;
29.所述第三公式组包括:
30.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
)*cbs,
31.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
)*cbs,
32.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
)*cbs。
33.另一方面,本发明实施例还提供了一种固体矢量推力器多余配额控制装置,其特征在于,所述固体矢量推力器包括多个推力器阀门,所述多个推力器阀门的输入端共用燃发器通道,所述多个推力器阀门的输出推力用于实现飞行器姿控,所述控制装置包括:
34.阀门开度计算模块,其用于根据俯仰、偏航及滚转通道所需推力分配各通道对应推力器阀门的阀门开度,并使工作时所述多个推力器阀门的阀门开度之和为定值;
35.多余配额控制模块,其用于引入多余配额调整每个通道的总喉径截面,以保证至少一个通道对应的推力器阀门的阀门开度满足所需推力;
36.阀门控制模块,其用于根据所述阀门开度控制对应推力器阀门的输出推力。
37.一些实施例中,所述阀门开度计算模块还用于根据第一公式组计算所述阀门开度;
38.所述第一公式组包括:
39.b1—b3=δ
13
,
40.b2a—b4a=δ
24a
,
41.b2b—b4b=δ
24b
,
42.其中,δ
13
为俯仰通道所需的推力,δ24a为偏航通道所需的推力,δ24b为滚转通道所需的推力,b1、b2a、b2b、b3、b4a、b4b分别对应为推力器阀门1、2a、2b、3、4a、4b的阀门开度,且推力器阀门1和推力器阀门3的输出推力作用于俯仰通道,推力器阀门2a和推力器阀门4a的输出推力作用于偏航通道,推力器阀门2b和推力器阀门4b的输出推力作用于滚转通道。
43.一些实施例中,所述阀门开度计算模块还用于根据第二公式组计算所述阀门开度;
44.所述第二公式组包括:
45.s_δ
sum
=(1e-18+|δ
13
|+|δ
24a
|+|δ
24b
|),
46.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
),
47.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
),
48.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
),
49.其中,s_δ
sum
为推力需求总量。
50.一些实施例中,所述多余配额控制模块还用于:
51.引入多余配额分配量参数,所述多余配额分配量参数满足:cbs=max(ca-|δ
13
|-|δ
24a
|-|δ
24b
|,0),其中,ca为系统推力预设阈值;
52.将所述多余配额分配量参数与所述第二公式组结合计算所述阀门开度。
53.一些实施例中,所述多余配额控制模块还用于根据第三公式组计算所述阀门开度;
54.所述第三公式组包括:
55.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
)*cbs,
56.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
)*cbs,
57.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
)*cbs。
58.本发明实施例提供了一种固体矢量推力器多余配额控制方法,通过控制整个阀门系统的等效喉径为定值,保证系统压强稳定的同时,引入多余配额量的参数控制阀门协同动作,实现指定通道推理按要求输出,而其他未用通道燃气对排,保证系统的合力为指定所需推力。
附图说明
59.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
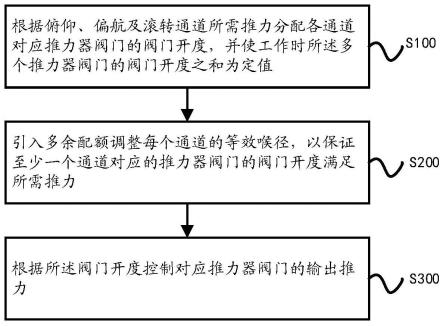
60.图1为本发明实施例提供的一种固体矢量推力器多余配额控制方法的流程示意图;
61.图2为本发明实施例提供的固体矢量推力器阀门布置示意图;
62.图3为本发明实施例提供的一种固体矢量推力器多余配额控制装置的结构示意图。
具体实施方式
63.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
64.如图1所示,本发明实施例提供了一种固体矢量推力器多余配额控制方法,包括步骤:
65.s100:根据俯仰、偏航及滚转通道所需推力分配各通道对应推力器阀门的阀门开度,并使工作时所述多个推力器阀门的阀门开度之和为定值;
66.s200:引入多余配额调整每个通道的等效喉径,以保证至少一个通道对应的推力器阀门的阀门开度满足所需推力;
67.s300:根据所述阀门开度控制对应推力器阀门的输出推力。
68.需要说明的是,固体矢量推力器采用固体推进剂产生的燃气作为工质,为飞行器飞行提供俯仰、偏航以及滚装的三通道控制力和力矩,用于实现对飞行器姿控。固体矢量推力器包括多个推力器阀门,多个推力器阀门的输入端共用燃发器通道,多个推力器阀门的输出推力用于实现飞行器姿控。
69.可以理解的是,使工作时多个推力器阀门的阀门开度之和为定值,体现各个阀门协同动作的总关系,工作时所有阀门的开度之和保持不变意味着整个阀门系统的等效喉径为定值,可保证系统压强波动小。由于等压强燃烧时间是固定的,则推力器的输出推力是固定的,可实现系统的稳定执行。
70.本实施例中考虑到推力器需要输出力对应的所有阀门总开度大于给定的开度上限时,可优先保证某个通道的开度(等效喉径)满足使用要求,并使其他通道的输出做相应地减少。
71.本发明实施例的目的在于在控制所有推力器阀门协同动作时,实现指定通道推理按要求输出,而其他未用通道的燃气推力对排,保证系统的合力为指定所需推力。
72.如图2所示的推力器阀门布置方式,一些实施例中,s100包括步骤:根据第一公式组计算所述阀门开度;所述第一公式组包括:
73.b1—b3=δ
13
,
74.b2a—b4a=δ
24a
,
75.b2b—b4b=δ
24b
,
76.其中,δ
13
为俯仰通道所需的推力,δ24a为偏航通道所需的推力,δ24b为滚转通道所需的推力,b1、b2a、b2b、b3、b4a、b4b分别对应为推力器阀门1、2a、2b、3、4a、4b的阀门开度,且推力器阀门1和推力器阀门3的输出推力作用于俯仰通道,推力器阀门2a和推力器阀门4a的输出推力作用于偏航通道,推力器阀门2b和推力器阀门4b的输出推力作用于滚转通道。
77.可以理解的是,通过如图2所示的6个推力器阀门实现指定推力输出并维持系统压强恒定,系统无额外排气通路。对于单个阀门而言,控制其阀门开度,意味着输入阀芯位移,阀门根据阀芯位移改变阀门输出的推力。
78.可优选地,s100还包括步骤根据第二公式组计算所述阀门开度;
79.所述第二公式组包括:
80.s_δ
sum
=(1e-18+|δ
13
|+|δ
24a
|+|δ
24b
|),
81.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
),
82.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
),
83.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
),
84.其中,s_δ
sum
为推力需求总量。
85.可以理解的是,当控制6个阀门的总喉径截面面积保持不变,即设计输出所有推力代数和不变,则可实现维持系统压强稳定。同时,由于各通道所需的推力与阀门开度成比例
关系,使控制精度和鲁棒性更强。
86.可优选地,采用归一化算法,将b1、b2a、b2b、b3、b4a、b4b以及δ
13
、δ24a、δ24b的数值变成-1至1之间的参数,则可作为脚本放置于任何控制器中调用,提升算法灵活性。
87.可优选地,通过simulink软件将第一公式组转化为控制算法,使算法能够在dsp等嵌入式芯片中应用。
88.一些实施例中,s200还包括步骤:
89.引入多余配额分配量参数,使其满足:cbs=max(ca-|δ
13
|-|δ
24a
|-|δ
24b
|,0),其中,ca为系统推力预设阈值;
90.将所述多余配额分配量参数与所述第二公式组结合计算所述阀门开度。
91.本实施例引入多余配额分配量参数,是考虑到出现一个通道执行力有最大限制时,导致不能达到最大推力的情况,可通过多余配额分配量参数影响各个通道的开度分配量,保证至少一个通道对应的推力器阀门的阀门开度满足所需推力。
92.可优选地,可在将多余配额的分配量按比例分配至每个通道时,使开度小的分配多,开度大的分配少。
93.一些实施例中,s200还包括步骤:
94.根据第三公式组计算所述阀门开度;
95.所述第三公式组包括:
96.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
)*cbs,
97.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
)*cbs,
98.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
)*cbs。
99.通过本实施例,保证了三个通道可以按指令自由分配,每个通道都有机会达到最大值。并且当关闭另外两个通道时,该通道推力可以超过100%,从而可使系统执行效率最大化。
100.基于本实施例,可获得每个阀门的阀门开度为:
101.b1=0.5*|δ
13
|+0.5*δ
13
+0.5*(1-|δ
13
|)/s_δ
sum
)*cbs,
102.b3=0.5*|δ
13
|-0.5*δ
13
+0.5*(1-|δ
13
|)/s_δ
sum
)*cbs,
103.b2a=0.5*|δ
24a
|+0.5*δ
24a
+0.5*(1-|δ
24a
|)/s_δ
sum
)*cbs,
104.b4a=0.5*|δ
24a
|-0.5*δ
24a
+0.5*(1-|δ
24a
|)/s_δ
sum
)*cbs,
105.b2b=0.5*|δ
24b
|+0.5*δ
24b
+0.5*(1-|δ
24b
|)/s_δ
sum
)*cbs,
106.b4b=0.5*|δ
24b
|-0.5*δ
24b
+0.5*(1-|δ
24b
|)/s_δ
sum
)*cbs,
107.在等压强输出的前提下可保证三个通道输出推力最大化。
108.如图3所示,本发明实施例还提供一种固体矢量推力器多余配额控制装置,固体矢量推力器包括多个推力器阀门,多个推力器阀门的输入端共用燃发器通道,多个推力器阀门的输出推力用于实现飞行器姿控,控制装置包括:
109.阀门开度计算模块,其用于根据俯仰、偏航及滚转通道所需推力分配各通道对应推力器阀门的阀门开度,并使工作时所述多个推力器阀门的阀门开度之和为定值;
110.多余配额控制模块,其用于引入多余配额调整每个通道的总喉径截面,以保证至少一个通道对应的推力器阀门的阀门开度满足所需推力;
111.阀门控制模块,其用于根据所述阀门开度控制对应推力器阀门的输出推力。
112.一些实施例中,阀门开度计算模块还用于根据第一公式组计算所述阀门开度;
113.所述第一公式组包括:
114.b1—b3=δ
13
,
115.b2a—b4a=δ
24a
,
116.b2b—b4b=δ
24b
,
117.其中,δ
13
为俯仰通道所需的推力,δ24a为偏航通道所需的推力,δ24b为滚转通道所需的推力,b1、b2a、b2b、b3、b4a、b4b分别对应为推力器阀门1、2a、2b、3、4a、4b的阀门开度,且推力器阀门1和推力器阀门3的输出推力作用于俯仰通道,推力器阀门2a和推力器阀门4a的输出推力作用于偏航通道,推力器阀门2b和推力器阀门4b的输出推力作用于滚转通道。
118.一些实施例中,阀门开度计算模块还用于根据第二公式组计算所述阀门开度;
119.所述第二公式组包括:
120.s_δ
sum
=(1e-18+|δ
13
|+|δ
24a
|+|δ
24b
|),
121.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
),
122.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
),
123.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
),
124.其中,s_δ
sum
为推力需求总量。
125.一些实施例中,多余配额控制模块还用于:
126.引入多余配额分配量参数,所述多余配额分配量参数满足:cbs=max(ca-|δ
13
|-|δ
24a
|-|δ
24b
|,0),其中,ca为系统推力预设阈值;
127.将所述多余配额分配量参数与所述第二公式组结合计算所述阀门开度。
128.一些实施例中,多余配额控制模块还用于根据第三公式组计算所述阀门开度;
129.所述第三公式组包括:
130.b1+b3=|δ
13
|+(1-|δ
13
|/s_δ
sum
)*cbs,
131.b2a+b4a=|δ
24a
|+(1-|δ
24a
|/s_δ
sum
)*cbs,
132.b2b+b4b=|δ
24b
|+(1-|δ
24b
|/s_δ
sum
)*cbs。
133.本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读存储介质上,计算机可读存储介质可以包括计算机可读存储介质(或非暂时性介质)和通信介质(或暂时性介质)。
134.需要说明的是,在本发明中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排
除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
135.以上仅为本发明实施例的具体实施方式,但本发明实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明实施例揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明实施例的保护范围之内。因此,本发明实施例的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1