一种多旋翼自动控制无人机的制作方法
1.本发明涉及无人机技术领域,具体为一种多旋翼自动控制无人机。
背景技术:
2.无人机,指不载有操作人员可以自主飞行或遥控驾驶的飞行器,而多旋翼无人机,是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机。其通过每个轴上的电动机转动,带动旋翼,从而产生升推力。旋翼的总距固定,而不像一般直升机那样可变。通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹;
3.在无人机使用的过程中,内部元件和电机会生产大量的热量,而一般无人机内部空间较小,往往不会设置有集成散热的装置,会导致无人机在长时间使用时内部温度持续上升,发生自动关机的现象,无人机会直接从高空中落下,产生较为严重损失,且没有可以变化的警示装置,使工作人员无法对无人机内部温度进行有效的判定,不能快速的根据不同情况做出反应;
4.为此,提出一种多旋翼自动控制无人机。
技术实现要素:
5.本发明的目的在于提供一种多旋翼自动控制无人机,解决了现有的无人机在使用过程中,内部产生热量无法自动降低高度,从高空直接落下容易造成较大的损失的问题;以及无人机不能对内部温度进行一个有效的显示,使用人员不能根据不同的情况进行快速的判定和有进行效的处理措施的问题;
6.为实现上述目的,本发明提供如下技术方案:
7.一种多旋翼自动控制无人机,包括主机体,支撑杆,固定安装在所述主机体的四周,放置腔,开设于所述主机体的内部,传动腔,开设于所述支撑杆的内部,所述放置腔内部的四周均固定安装有电机,所述电机的输出端固定安装有动力轴,所述动力轴的一端依次贯穿主机体和支撑杆并延伸至支撑杆的内部,所述传动腔内部的一侧转动安装有一号圆台,所述传动腔内部的顶部转动安装有二号圆台,所述动力轴的一端与一号圆台的一侧固定连接,所述二号圆台的顶部固定安装有传动轴,所述传动轴的顶部活动安装有支撑环,所述支撑环的外表面固定安装有桨叶,所述传动腔的内部转动安装有转动柱,所述转动柱的外表面滑动安装有一号传动轮,所述转动柱的外表面且位于一号传动轮的上方滑动安装有二号传动轮,所述传动腔的内部滑动安装有滑动条,所述滑动条一侧的顶部和底部均固定安装有限位框。
8.优选的,位于顶部所述限位框的内表面与二号传动轮的外表面接触,位于底部所述限位框的内表面与一号传动轮的外表面接触,所述一号传动轮的外表面与一号圆台的外表面传动连接,所述二号传动轮的外表面与二号圆台的外表面传动连接。
9.优选的,所述放置腔的内部固定安装有环型箱,所述环型箱的内部填充有蒸发液,所述环型箱的内部滑动安装有密封环,所述环型箱的四周均连通有出气管。
10.优选的,所述出气管的一端依次贯穿主机体和支撑杆并延伸至传动腔的内部,所述出气管的一端固定安装有一号气囊,所述一号气囊的顶部与滑动条的底部固定连接。
11.在环型箱的内部且位于密封环的下方填有丙酮,其沸点为56度,当无人机内部热量较高时,会使环型箱内部的蒸发液沸腾汽化,体积增大,推动密封环向上移动,将密封环上方气体进行挤压,使气体通过出气管和连通管分别进入一号气囊和二号气囊的内部,一号气囊在被气体冲入时,会发生延伸,推动滑动条在转动柱上向上移动,并通过限位框带着一号传动轮和二号传动轮同时进行移动,随着温度的上升,气体进入一号气囊也不断增多,使一号传动轮从一号圆台较大半径逐渐移动到较小半径处,二号传动轮逐渐从二号圆台较小半径处移动到较大半径处,通过控制传动比,使桨叶转动的速度随着内部温度的上升而逐渐下降,从而使无人机在空中的高度也逐渐下降,可以在无人机内部发热的情况下,自动降低无人机在空中时的高度,进而减少无人机在发生炸机现象时的损失,提高无人机在使用时的实用性。
12.优选的,所述放置腔的内部固定安装有固定柱,所述固定柱的顶部开设有中空槽,所述中空槽的内壁固定安装有电阻丝。
13.优选的,所述环型箱的外表面连通有连通管,所述连通管的一端固定安装有二号气囊,所述二号气囊的底部固定安装有触头,所述触头与电阻丝接触配合。
14.优选的,所述主机体的底部固定安装有警示灯,所述电阻丝的底端通过导线与警示灯的其中一个电极电性连接,所述触头通过导线与警示灯的另一个电极电性连接。
15.进入二号气囊内部的气体,会使二号气囊发生延伸,在二号气囊的一端在带着触头移动的过程中,触头与电阻丝接触并连通电路,使警示灯发生亮度,随着温度的升高,二号气囊进一步的延伸,使触头连通的电阻丝的长度逐渐少,从而使电路里的电阻变小,使警示灯的亮度也不断增加,使无人机内部在发热的时候,自动使警示灯随着温度的上升而不断变亮,配合无人机高度的下降对使用人员进行有效警示作用,给予使用人员一定的反应时间。
16.优选的,所述传动轴的内部开设有控制腔,所述控制腔的内部固定安装有延伸柱,所述延伸柱的外表面滑动安装有按压块,所述按压块的顶部贯穿传动轴并延伸至传动轴的外部。
17.优选的,所述延伸柱的正面开设有限位槽,所述按压块的内部转动安装有限位条,所述限位槽的内表面与限位条的外表面滑动连接,所述按压块的底部固定安装有弹簧,所述弹簧的底部与控制腔的内壁固定连接。
18.优选的,所述按压块底部的两侧均转动安装有连接条,所述控制腔底壁的两侧滑动安装有卡齿,所述连接条的底部与卡齿的顶部转动连接,所述支撑环的内表面开设有卡槽,所述卡齿的外表面与卡槽的内表面活动连接。
19.当桨叶发生损坏需要更换时,先向下按压按压块,限位条在按压块内部转动的同时在延伸柱上的限位槽内部滑动,在弹簧的挤压下,使限位条从限位槽底板曲折处移动到顶部的曲折处,按压块向上移动并被限位条钩住,同时通过连接条会将卡齿向内拉离开卡槽,即可将支撑环和桨叶取下更换,之后再次按压按压块,限位条从限位槽顶部的曲折处移动到底部曲折处,并在弹簧的挤压下通过限位条将按压块钩住,同时在连接条的推动下使卡齿进入卡槽将支撑环和桨叶固定在传动轴上,使桨叶在发生损坏时可以更加方便的进行
更换和安装,同时还保持其安装后的稳定性,使用更加方便。
20.与现有技术相比,本发明的有益效果为:
21.1、通过环型箱内部的蒸发被液沸腾汽化,使密封环上方气体被挤压,推动滑动条在转动柱上向上移动,使一号传动轮从一号圆台较大半径逐渐移动到较小半径处,二号传动轮逐渐从二号圆台较小半径处移动到较大半径处,通过控制传动比,使桨叶转动的速度随着内部温度的上升而逐渐下降,从而使无人机在空中的高度也逐渐下降,可以在无人机内部发热的情况下,自动降低无人机在空中时的高度,进而减少无人机在发生炸机现象时的损失,提高无人机在使用时的实用性。
22.2、通过二号气囊的一端带着触头移动,在触头与电阻丝接触并连通电路时,警示灯发生亮度,随着温度的升高,二号气囊进一步的延伸,使触头连通的电阻丝的长度逐渐少,从而使电路里的电阻变小,使警示灯的亮度也不断增加,使无人机内部在发热的时候,自动使警示灯随着温度的上升而不断变亮,配合无人机高度的下降对使用人员进行有效警示作用,使工作人员可以根据不同情况快速做出反应,给予使用人员一定的处理时间。
23.3、通过按压按压块,使限位条在限位槽内部滑动,在弹簧的挤压下,使限位条在限位槽两处曲折处移动并将按压块钩住,并通过连接条控制卡齿与卡槽之间的卡接,使桨叶在发生损坏时可以更加方便的进行更换和安装,同时还保持其安装后的稳定性,使用更加方便。
附图说明
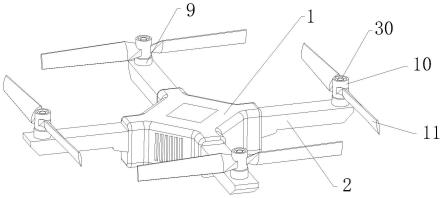
24.图1为本发明的整体结构立体图;
25.图2为本发明的内部结构纵剖示意图;
26.图3为图2中a处结构放大图;
27.图4为本发明的传动轴和支撑环内部结构局部示意图;
28.图5为本发明的延伸柱外部结构示立体图;
29.图6为图2中b处结构放大图。
30.图中:1主机体、2支撑杆、3放置腔、4传动腔、5电机、6动力轴、7一号圆台、8二号圆台、9传动轴、10支撑环、11桨叶、12转动柱、13一号传动轮、14二号传动轮、15滑动条、16限位框、17环型箱、18密封环、19出气管、20一号气囊、21固定柱、22中空槽、23电阻丝、24连通管、25二号气囊、26触头、27警示灯、28控制腔、29延伸柱、30按压块、31限位槽、32限位条、33弹簧、34连接条、35卡齿、36卡槽。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明实施例通过提供一种多旋翼自动控制无人机,解决了现有的无人机在使用过程中,内部产生热量无法自动降低高度,从高空直接落下容易造成较大的损失的问题;以及无人机不能对内部温度进行一个有效的显示,使用人员不能根据不同的情况进行快速的
判定和有进行效的处理措施的问题;
33.本发明实施例中的技术方案为解决上述技术问题,总体思路如下:通过温度的变化对电机和桨叶的传动比进行控制,使得桨叶转动的速度随着内部温度的上升而逐渐下降,从而使无人机在空中的高度也逐渐下降,可以在无人机内部发热的情况下,自动降低无人机在空中时的高度,相较与现有的无人机,可以使无人机在发生炸机的现象时减少损失;并通过控制触头和电阻丝接触的长度,无人机内部在发热的时候,自动使警示灯随着温度的上升而不断变亮,配合无人机高度的下降对使用人员进行有效警示作用,使工作人员可以根据不同情况快速做出反应,给予使用人员一定的处理时间;
34.请参阅图1至图6,本发明提供一种多旋翼自动控制无人机,技术方案如下:
35.一种多旋翼自动控制无人机,包括主机体1,支撑杆2,固定安装在主机体1的四周,放置腔3,开设于主机体1的内部,传动腔4,开设于支撑杆2的内部,放置腔3内部的四周均固定安装有电机5,电机5的输出端固定安装有动力轴6,动力轴6的一端依次贯穿主机体1和支撑杆2并延伸至支撑杆2的内部,传动腔4内部的一侧转动安装有一号圆台7,传动腔4内部的顶部转动安装有二号圆台8,动力轴6的一端与一号圆台7的一侧固定连接,二号圆台8的顶部固定安装有传动轴9,传动轴9的顶部活动安装有支撑环10,支撑环10的外表面固定安装有桨叶11,传动腔4的内部转动安装有转动柱12,转动柱12的外表面滑动安装有一号传动轮13,转动柱12的外表面且位于一号传动轮13的上方滑动安装有二号传动轮14,传动腔4的内部滑动安装有滑动条15,滑动条15一侧的顶部和底部均固定安装有限位框16,位于顶部限位框16的内表面与二号传动轮14的外表面接触,位于底部限位框16的内表面与一号传动轮13的外表面接触,一号传动轮13的外表面与一号圆台7的外表面传动连接,二号传动轮14的外表面与二号圆台8的外表面传动连接,放置腔3的内部固定安装有环型箱17,所述环型箱17的内部填充有蒸发液,环型箱17的内部滑动安装有密封环18,环型箱17的四周均连通有出气管19,出气管19的一端依次贯穿主机体1和支撑杆2并延伸至传动腔4的内部,出气管19的一端固定安装有一号气囊20,一号气囊20的顶部与滑动条15的底部固定连接。
36.当无人机内部热量较高时,会使环型箱17内部的蒸发液沸腾汽化,体积增大,推动密封环18向上移动,将密封环18上方气体进行挤压,使气体通过出气管19和连通管24分别进入一号气囊20和二号气囊25的内部,一号气囊20在被气体冲入时,会发生延伸,推动滑动条15在转动柱12上向上移动,并通过限位框16带着一号传动轮13和二号传动轮14同时进行移动,随着温度的上升,气体进入一号气囊20也不断增多,使一号传动轮13从一号圆台7较大半径逐渐移动到较小半径处,二号传动轮14逐渐从二号圆台8较小半径处移动到较大半径处,通过控制传动比,使桨叶11转动的速度随着内部温度的上升而逐渐下降,从而使无人机在空中的高度也逐渐下降,可以在无人机内部发热的情况下,自动降低无人机在空中时的高度,进而减少无人机在发生炸机现象时的损失,提高无人机在使用时的实用性。
37.作为本发明的一种实施方式,参照图2和图6,放置腔3的内部固定安装有固定柱21,固定柱21的顶部开设有中空槽22,中空槽22的内壁固定安装有电阻丝23,环型箱17的外表面连通有连通管24,连通管24的一端固定安装有二号气囊25,二号气囊25的底部固定安装有触头26,触头26与电阻丝23接触配合,主机体1的底部固定安装有警示灯27,电阻丝23的底端通过导线与警示灯27的其中一个电极电性连接,触头26通过导线与警示灯27的另一个电极电性连接。
38.进入二号气囊25内部的气体,也会使二号气囊25发生延伸,在二号气囊25的一端在带着触头26移动的过程中,触头26与电阻丝23接触并连通电路,使警示灯27发生亮度,随着温度的升高,二号气囊25进一步的延伸,使触头26连通的电阻丝23的长度逐渐少,从而使电路里的电阻变小,使警示灯27的亮度也不断增加,使无人机内部在发热的时候,自动使警示灯27随着温度的上升而不断变亮,配合无人机高度的下降对使用人员进行有效警示作用,给予使用人员一定的反应时间。
39.作为本发明的一种实施方式,参照图2、图4和图5,传动轴9的内部开设有控制腔28,控制腔28的内部固定安装有延伸柱29,延伸柱29的外表面滑动安装有按压块30,按压块30的顶部贯穿传动轴9并延伸至传动轴9的外部,延伸柱29的正面开设有限位槽31,按压块30的内部转动安装有限位条32,限位槽31的内表面与限位条32的外表面滑动连接,按压块30的底部固定安装有弹簧33,弹簧33的底部与控制腔28的内壁固定连接,按压块30底部的两侧均转动安装有连接条34,控制腔28底壁的两侧滑动安装有卡齿35,连接条34的底部与卡齿35的顶部转动连接,支撑环10的内表面开设有卡槽36,卡齿35的外表面与卡槽36的内表面活动连接。
40.当桨叶11发生损坏需要更换时,先向下按压按压块30,限位条32在按压块30内部转动的同时在延伸柱29上的限位槽31内部滑动,在弹簧33的挤压下,使限位条32从限位槽31底板曲折处移动到顶部的曲折处,按压块30向上移动并被限位条32钩住,同时通过连接条34会将卡齿35向内拉离开卡槽36,即可将支撑环10和桨叶11取下更换,之后再次按压按压块30,限位条32从限位槽31顶部的曲折处移动到底部曲折处,并在弹簧33的挤压下通过限位条32将按压块30钩住,同时在连接条34的推动下使卡齿35进入卡槽36将支撑环10和桨叶11固定在传动轴9上,使桨叶11在发生损坏时可以更加方便的进行更换和安装,同时还保持其安装后的稳定性,使用更加方便。
41.工作原理:首先工作人员在使用无人机时,启动四个电机5,带动动力轴6转动,并带动一号圆台7转动,而一号圆台7会带动一号传动轮13发生转动,一号传动轮13与二号传动轮14内表面上的凹槽和转动柱12上的凸起使一号传动轮13会通过转动柱12带动二号传动轮14转动,二号传动轮14带动二号圆台8转动,使支撑环10上桨叶11被传动轴9带动发生转动,继而将无人机升空飞行,当无人机在飞行的过程中,内部元件和电机5会发生热量,当内部热量较高时,会使环型箱17内部的蒸发液沸腾汽化(蒸发液可以选择热胀冷缩系数较好的甲醇、二甲苯、水银以及酒精等),体积增大,推动密封环18向上移动,将密封环18上方气体进行挤压,使气体通过出气管19和连通管24分别进入一号气囊20和二号气囊25的内部,一号气囊20在被气体冲入时,会发生延伸,推动滑动条15在转动柱12上向上移动,并通过限位框16带着一号传动轮13和二号传动轮14同时进行移动,随着温度的上升,气体进入一号气囊20也不断增多,使一号传动轮13从一号圆台7较大半径逐渐移动到较小半径处,二号传动轮14逐渐从二号圆台8较小半径处移动到较大半径处,通过控制传动比,使桨叶11转动的速度随着内部温度的上升而逐渐下降,从而使无人机在空中的高度也逐渐下降,而进入二号气囊25内部的气体,也会使二号气囊25发生延伸,在二号气囊25的一端在带着触头26移动的过程中,触头26与电阻丝23接触并连通电路,使警示灯27发生亮度,随着温度的升高,二号气囊25进一步的延伸,使触头26连通的电阻丝23的长度逐渐少,从而使电路里的电阻变小,使警示灯27的亮度也不断增加,当主机体1内部温度变为正常后,蒸发液冷凝,体积
还原,使密封环18向下会归原位,使一号气囊20和二号气囊25内部气体被抽回环型箱17的内部,一号气囊20收缩从而使滑动条15通过限位框16带着一号传动轮13和二号传动轮14回位,二号气囊25同时收缩,带着触头26回归原位,而当桨叶11发生损坏需要更换时,先向下按压按压块30,限位条32在按压块30内部转动的同时在延伸柱29上的限位槽31内部滑动,在弹簧33的挤压下,使限位条32从限位槽31底板曲折处移动到顶部的曲折处,按压块30向上移动并被限位条32钩住,同时通过连接条34会将卡齿35向内拉离开卡槽36,即可将支撑环10和桨叶11取下更换,之后再次按压按压块30,限位条32从限位槽31顶部的曲折处移动到底部曲折处,并在弹簧33的挤压下通过限位条32将按压块30钩住,同时在连接条34的推动下使卡齿35进入卡槽36将支撑环10和桨叶11固定在传动轴9上。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1