一种无人机机载多目标探测跟踪激光清障仪的制作方法
1.本发明涉及一种无人机机载多目标探测跟踪激光清障仪。
背景技术:
2.电网中的架空线路主要指架空明线,架设在地面之上,是用绝缘子将输电导线固定在直立于地面的杆塔上以传输电能的输电线路。而随空气流动和风力作用,架空线路沿线会有异物(如常见的风筝、飘带、广告布、麻绳、风筝线、鱼线)挂在导线上,极易引起线路接地、相间短路而跳闸,并且铁塔横担附近鸟巢稻草下垂太长也会引起输电线路跳闸,需要对输电线路进行巡检清障。
3.输电网中的障碍物大多采用人工朝障碍物处喷火进行清障,障碍物清除率较低,劳动强度大,并且会造成火灾隐患以及输电网的损毁,而通过无人机载清障能够降低操作人员的劳动强度,无人机喷火技术在110kv输电线路清除异物的应用,整个操作过程15min,仅需2~4名操作人员,该项清除技术虽然方便快捷,但极易引发火灾,存在一定的安全隐患。
4.现有技术中,无人机只能实现对单一目标实现探测跟踪的激光清障工作,所以,当输电网中的同一位置周围出现多个目标异物时,现有无人机只能挨个对不同角度的多个目标异物实现清障,但此清障方式不仅耗时长,清障效率低,而且长时间的工作也加大了无人机的电量损耗,进而难以保证整体设备的稳定使用。
技术实现要素:
5.本发明所要达到的目的就是提供一种无人机机载多目标探测跟踪激光清障仪,清障时能实现整个装置的圆周转动,保证了对线路表面异物探测跟踪定位的效果。
6.为了解决上述技术问题,本发明是通过以下技术方案实现的:一种无人机机载多目标探测跟踪激光清障仪,包括无人机本体、激光器和瞄准相机,所述无人机本体包括壳体,所述壳体的下表面固定连接有电动伸缩杆,所述电动伸缩杆上设有周向转动机构,所述周向转动机构上设有安装激光器的角度调节机构,所述瞄准相机设置在激光器上,且所述激光器的激光头和瞄准相机的摄像头位于同一竖直平面上,所述角度调节机构上设有驱动激光器做摆动运动的第二驱动电机,以及驱动激光器做周向转动的第三驱动电机;所述壳体的两侧设有缓冲机构,所述缓冲机构包括垫块和缓冲弹簧,所述缓冲弹簧设置在垫块内。
7.优选的,所述周向转动机构包括第一驱动电机和连接板,所述电动伸缩杆包括活塞杆,所述第一驱动电机固定连接在活塞杆上,所述连接板设置在第一驱动电机上,所述活塞杆伸缩带动所述第一驱动电机沿无人机本体的竖直方向实现升降动作,所述第一驱动电机驱动连接板实现圆周运动。
8.优选的,所述第一驱动电机上设有第一联轴器,所述第一联轴器上安装连接板的第一传动轴,且连接板为十字型连接板。
9.优选的,所述角度调节机构包括基座、摆动板和转动连接在摆动板上的转杆,所述
摆动板转动连接在基座上,所述第二驱动电机设置在基座上且与摆动板相连,所述第三驱动电机设在基座上且与转杆相连,所述激光器设置在转杆上。
10.优选的,所述基座包括安装板、第一固定板和第二固定板,所述安装板设置在连接板的下表面,所述第一固定板和第二固定板均设置在第二驱动电机和第三驱动电机之间的安装板上,所述摆动板的一端设有转动轴,所述转动轴通过轴承固定在第一固定板上,所述摆动板上设有与转杆相连的第二传动轴,所述第二传动轴延伸至在第二固定板上后与第三驱动电机相连。
11.优选的,所述第二驱动电机上设有与转动轴相连的第二联轴器,所述第三驱动电机上设有与第二传动轴相连的第三联轴器,所述第二传动轴与转杆之间设有齿轮组件,所述齿轮组件包括相互啮合的第一锥齿轮和第二锥齿轮。
12.优选的,所述基座还包括第一安装座和第二安装座,所述第一安装座和第二安装座均通过螺栓固定在安装板的下表面,所述第二驱动电机固定连接在第一安装座的下表面,所述第三驱动电机固定安装在第二安装座的下表面。
13.优选的,所述缓冲机构包括安装在壳体两侧的支撑杆,所述垫块固定安装在支撑杆的底端。
14.优选的,所述垫块的内部设有缓冲腔,所述缓冲弹簧固定安装在缓冲腔的内顶壁,所述缓冲腔的内底壁开设有缓冲孔,所述缓冲孔的内壁滑动套接有缓冲块,所述缓冲弹簧与缓冲块的上表面固定连接。
15.优选的,所述缓冲块的下表面固定安装有缓冲层,所述缓冲腔的内顶壁固定安装有限位开关,所述缓冲块的上表面安装有触发杆,所述触发杆与限位开关的触发端接触,所述限位开关与无人机本体电性连接。
16.综上所述,本发明的优点:将激光器安装在周向转动机构上设置的角度调节机构上,因此能在周向转动机构的作用下实现角度调节机构的圆周运动,从而避免了激光器和瞄准相机对输电线路表面异物探测跟踪不到的问题发生,进一步提高了清障质量,而周向转动机构通过电动伸缩杆设置在无人机本体的壳体上,因此能在电动伸缩杆的作用下实现周向转动机构沿无人机的竖直方向实现升降动作,从而能适应不同环境下的架空线路,确保了整个激光清障仪的稳定性,其次,由于角度调节机构上设有驱动激光器做摆动运动的第二驱动电机,以及驱动激光器做周向转动的第三驱动电机,因此激光器在第二驱动电机的作用下实现俯、仰角度的调节,在第三驱动电机的作用下实现周向方向的调节,从而实现了对激光器进行多角度调节,便于对多目标异物进行探测跟踪的效果,解决了现有无人机只能实现对单一目标实现探测跟踪的激光清障工作的问题,而且瞄准相机设置在激光器上,激光器的激光头和瞄准相机的摄像头位于同一竖直平面上,因此,使用时能将瞄准相机作为主视觉,用于辅助特种激光器对目标异物进行瞄准定位,最后将缓冲机构设置成垫块和缓冲弹簧的结构,能控制无人机本体在降落时,垫块与地面接触,由于垫块内设有缓冲弹簧,因此通过缓冲弹簧的弹力而减缓无人机降落产生的冲击力,从而保证了无人机本体安全降落的效果。
附图说明
17.下面结合附图对本发明作进一步说明:
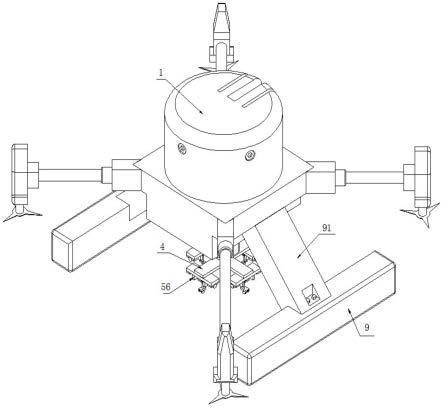
18.图1为本发明一种无人机机载多目标探测跟踪激光清障仪的结构示意图;
19.图2为本发明中角度调节机构在电动伸缩杆上的结构示意图;
20.图3为本发明中连接板的结构示意图;
21.图4为本发明中角度调节机构的结构示意图;
22.图5为本发明中摆动板的结构示意图;
23.图6为本发明中垫块的结构示意图。
24.附图标记:
25.1无人机本体、2电动伸缩杆、3第一驱动电机、31第一传动轴、4连接板、5第二驱动电机、51安装板、52第一安装座、53第二安装座、54摆动板、55第二传动轴、56第一固定板、57第二固定板、58第一锥齿轮、59转杆、510第二锥齿轮、6第三驱动电机、7激光器、8瞄准相机、9垫块、91支撑杆、92缓冲腔、93缓冲孔、94缓冲块、95缓冲层、96限位开关、97触发杆、10缓冲弹簧。
具体实施方式
26.如图1、图2、图3、图4、图5和图6所示,一种无人机机载多目标探测跟踪激光清障仪,包括无人机本体1、激光器7和瞄准相机8,所述无人机本体1包括壳体,所述壳体的下表面固定连接有电动伸缩杆2,所述电动伸缩杆2上设有周向转动机构,所述周向转动机构上设有安装激光器的角度调节机构;所述瞄准相机8设置在激光器7上,且所述激光器7的激光头和瞄准相机8的摄像头位于同一竖直平面上,所述角度调节机构上设有驱动激光器7做摆动运动的第二驱动电机5,以及驱动激光器7做周向转动的第三驱动电机6,所述壳体的两侧设有缓冲机构,所述缓冲机构包括垫块9和缓冲弹簧10,所述缓冲弹簧10设置在垫块9内。
27.将激光器安装在周向转动机构上设置的角度调节机构上,因此能在周向转动机构的作用下实现角度调节机构的圆周运动,从而避免了激光器和瞄准相机对输电线路表面异物探测跟踪不到的问题发生,进一步提高了清障质量,而周向转动机构通过电动伸缩杆设置在无人机本体的壳体上,因此能在电动伸缩杆的作用下实现周向转动机构沿无人机的竖直方向实现升降动作,从而能适应不同环境下的架空线路,确保了整个激光清障仪的稳定性,其次,由于角度调节机构上设有驱动激光器做摆动运动的第二驱动电机,以及驱动激光器做周向转动的第三驱动电机,因此激光器在第二驱动电机的作用下实现俯、仰角度的调节,在第三驱动电机的作用下实现周向方向的调节,从而实现了对激光器进行多角度调节,便于对多目标异物进行探测跟踪的效果,解决了现有无人机只能实现对单一目标实现探测跟踪的激光清障工作的问题,而且瞄准相机设置在激光器上,激光器的激光头和瞄准相机的摄像头位于同一竖直平面上,因此,使用时能将瞄准相机作为主视觉,用于辅助特种激光器对目标异物进行瞄准定位,最后将缓冲机构设置成垫块和缓冲弹簧的结构,能控制无人机本体在降落时,垫块与地面接触,由于垫块内设有缓冲弹簧,因此通过缓冲弹簧的弹力而减缓无人机降落产生的冲击力,从而保证了无人机本体安全降落的效果。
28.所述周向转动机构包括第一驱动电机3和连接板4,所述电动伸缩杆2包括活塞杆,所述第一驱动电机固定连接在活塞杆上,所述连接板设置在第一驱动电机上,所述活塞杆伸缩带动所述第一驱动电机沿无人机本体的竖直方向实现升降动作,所述第一驱动电机驱动连接板实现圆周运动,连接板增大了角度调节机构的安装面积,保证了角度调节机构的
稳定性,所述第一驱动电机3上设有第一联轴器,所述第一联轴器上安装连接板4的第一传动轴31,且连接板4为十字型连接板,第一联轴器和第一传动轴31能快速的实现连接板4与第一驱动电机3的连接,将连接板4设置成十字型连接板,一方面能减少连接板4的重量,保证无人机本体1飞行的稳定性,另一方面,十字型连接板使各个角度调节机构相互独立的安装在连接板4的端部,而且能使角度调节机构均匀的分布在连接板4上,确保了连接板4在周向转动时激光头的稳定性。
29.所述角度调节机构包括基座、摆动板54和转动连接在摆动板54上的转杆59,所述摆动板54转动连接在基座上,所述第二驱动电机5设置在基座上且与摆动板54相连,所述第三驱动电机6设在基座上且与转杆59相连,所述激光器7设置在转杆59上,所述瞄准相机8设置在激光器7的下表面,通过将角度调节机构设置成基座、摆动板54和转杆59的结构,使用时,第二驱动电机5转动而带动摆动板54转动,由于转杆59设置在摆动板54上,因此,摆动板54转动时能带动转杆59上的激光器7同步转动,第三驱动电机6转动而带动转杆59转动,从而使激光器7随转杆59同步转动,转杆59和摆动板54之间相互独立,也可以同时驱动摆动板54和转杆59的转动,使其适应不同的角度调节需求,适应不同的清障环境。
30.所述基座包括安装板51、第一固定板56和第二固定板57,所述安装板51设置在连接板4的下表面,所述第一固定板56和第二固定板57均设置在第二驱动电机5和第三驱动电机6之间的安装板51上,所述摆动板54的一端设有转动轴,所述转动轴通过轴承固定在第一固定板56上,所述摆动板54上设有第二传动轴55,所述第二传动轴55与转杆59之间设有齿轮组件,所述第二传动轴55延伸至在第二固定板57上后与第三驱动电机6相连,安装板51能增大基座与连接板4的接触面积,保证整个基座在连接板4上的固定质量,第一固定板56和第二固定板57的设置,能分别实现摆动杆和第二传动轴55的转动,其次,在第二传动轴55和转杆59之间设置齿轮组件,能保证第二传动轴55与转杆59之间的平稳传动,而且使用时可通过调节齿轮组件的传动比来控制转杆59的转速。
31.所述第二驱动电机5上设有与转动轴相连的第二联轴器,所述第三驱动电机6上设有与第二传动轴55相连的第三联轴器,所述齿轮组件包括相互啮合的第一锥齿轮58和第二锥齿轮510,且所述第一锥齿轮58设置在第二传动轴55上,所述第二锥齿轮510设置在转杆59上,第二联轴器能实现第二驱动电机5与转动轴连接的可靠性,第三联轴器能实现第三驱动电机6与第二传动轴55连接的可靠性,通过第一锥齿轮58和第二锥齿轮510的啮合传动,实现第二传动轴55与转杆59之间的连接,保证了转杆59的圆周运动。所述基座还包括第一安装座52和第二安装座53,所述第一安装座52和第二安装座53均通过螺栓固定在安装板51的下表面,所述第二驱动电机5固定连接在第一安装座52的下表面,所述第三驱动电机6固定安装在第二安装座53的下表面,能实现第二驱动电机5和第三驱动电机6相互独立的安装在安装板51上。
32.所述缓冲机构包括安装在壳体两侧的支撑杆91,所述垫块9固定安装在支撑杆91的底端,本实施例中,使无人机本体1在水平放置时,能通过支撑杆91和垫块9对其起到一定的支撑作用。其次,所述垫块9的内部设有缓冲腔92,所述缓冲弹簧10固定安装在缓冲腔92的内顶壁,所述缓冲腔92的内底壁开设有缓冲孔93,所述缓冲孔93的内壁滑动套接有缓冲块94,所述缓冲弹簧10与缓冲块94的上表面固定连接,缓冲孔93的设置,能保证缓冲块94在垫块9内滑动的直线度,保证缓冲弹簧10压缩的平稳性。最后,所述缓冲块94的下表面固定
安装有缓冲层95,所述缓冲腔92的内顶壁固定安装有限位开关96,所述缓冲块94的上表面安装有触发杆97,所述触发杆97与限位开关96的触发端接触,所述限位开关96与无人机本体1电性连接,本实施例中,无人机本体1在降落过程中,缓冲弹簧10带动缓冲块94在缓冲孔93内向上滑动,从而使触发杆97与限位开关96接触,此时的无人机已安全降落。
33.以上所述仅为本发明的具体实施例,但本发明的技术特征并不局限于此,任何本领域的技术人员在本发明的领域内,所作的变化或修饰皆涵盖在本发明的专利范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1